Language-Image Models with 3D Understanding
2405.03685
0
0
🤔
Abstract
Multi-modal large language models (MLLMs) have shown incredible capabilities in a variety of 2D vision and language tasks. We extend MLLMs' perceptual capabilities to ground and reason about images in 3-dimensional space. To that end, we first develop a large-scale pre-training dataset for 2D and 3D called LV3D by combining multiple existing 2D and 3D recognition datasets under a common task formulation: as multi-turn question-answering. Next, we introduce a new MLLM named Cube-LLM and pre-train it on LV3D. We show that pure data scaling makes a strong 3D perception capability without 3D specific architectural design or training objective. Cube-LLM exhibits intriguing properties similar to LLMs: (1) Cube-LLM can apply chain-of-thought prompting to improve 3D understanding from 2D context information. (2) Cube-LLM can follow complex and diverse instructions and adapt to versatile input and output formats. (3) Cube-LLM can be visually prompted such as 2D box or a set of candidate 3D boxes from specialists. Our experiments on outdoor benchmarks demonstrate that Cube-LLM significantly outperforms existing baselines by 21.3 points of AP-BEV on the Talk2Car dataset for 3D grounded reasoning and 17.7 points on the DriveLM dataset for complex reasoning about driving scenarios, respectively. Cube-LLM also shows competitive results in general MLLM benchmarks such as refCOCO for 2D grounding with (87.0) average score, as well as visual question answering benchmarks such as VQAv2, GQA, SQA, POPE, etc. for complex reasoning. Our project is available at https://janghyuncho.github.io/Cube-LLM.
Create account to get full access
Overview
- This paper introduces a new multi-modal large language model (MLLM) called Cube-LLM that can ground and reason about images in 3-dimensional space.
- The researchers first developed a large-scale pre-training dataset called LV3D by combining multiple existing 2D and 3D recognition datasets into a common question-answering format.
- They then pre-trained Cube-LLM on the LV3D dataset, demonstrating that pure data scaling can lead to strong 3D perception capabilities without specialized architectural designs or training objectives.
- Cube-LLM exhibits several interesting properties similar to other large language models, such as the ability to apply chain-of-thought prompting, follow complex instructions, and adapt to diverse input/output formats.
- Experiments show that Cube-LLM outperforms existing baselines on 3D grounded reasoning and complex reasoning about driving scenarios, and also performs competitively on general MLLM benchmarks.
Plain English Explanation
The researchers have developed a new type of AI model called Cube-LLM that can understand and reason about images in 3D space, not just 2D. To train this model, they first combined a bunch of existing 2D and 3D image recognition datasets into a single large dataset called LV3D, where the task is to answer questions about the images.
They then trained Cube-LLM on this LV3D dataset, and found that simply giving the model a huge amount of data was enough for it to develop strong 3D perception capabilities, without needing any special architectural changes or training objectives. In other words, the model was able to learn about 3D just from being exposed to a lot of 3D data.
Cube-LLM has some neat properties, like the ability to think through a problem step-by-step and to adapt to all kinds of different inputs and outputs. It also performs very well on benchmarks that test 3D grounded reasoning and reasoning about complex driving scenarios, outperforming existing models.
The researchers also show that Cube-LLM does well on more general multi-modal language tasks like 2D image grounding and visual question answering. Overall, this work demonstrates that you can get powerful 3D perception capabilities just by training a large language model on a lot of diverse 2D and 3D data, without needing specialized architecture or techniques.
Technical Explanation
The key technical contributions of this work are:
-
LV3D Dataset: The researchers developed a large-scale pretraining dataset called LV3D by combining multiple existing 2D and 3D recognition datasets into a common question-answering format. This allows the model to learn about 2D and 3D perception in a unified way.
-
Cube-LLM Architecture: The researchers introduced a new MLLM architecture called Cube-LLM, which they pre-trained on the LV3D dataset. Interestingly, they found that pure data scaling, without any 3D-specific architectural designs or training objectives, was sufficient for the model to develop strong 3D perception capabilities.
-
Intriguing Model Properties: Cube-LLM exhibits several interesting properties: (1) It can apply chain-of-thought prompting to improve 3D understanding from 2D context, (2) It can follow complex and diverse instructions and adapt to versatile input/output formats, and (3) It can be visually prompted with 2D boxes or 3D candidates from specialists.
-
Benchmark Results: Experiments show that Cube-LLM significantly outperforms existing baselines on 3D grounded reasoning benchmarks like Talk2Car (+21.3 AP-BEV) and complex reasoning about driving scenarios on DriveLM (+17.7 points). It also performs competitively on general MLLM benchmarks like refCOCO, VQAv2, GQA, and SQA.
Critical Analysis
The main strengths of this work are the impressive performance of Cube-LLM on 3D perception tasks, its ability to learn powerful 3D understanding from 2D and 3D data alone, and its broad set of capabilities that go beyond just 3D reasoning.
However, the paper does not provide much detail on the specific architectural choices or training procedures used for Cube-LLM. It would be helpful to know more about the model design and how it differs from other large language models. Additionally, the paper does not discuss the computational and memory requirements of Cube-LLM, which could be an important consideration for real-world deployment.
Furthermore, the benchmarks used in this study are primarily focused on outdoor scenes and driving scenarios. It would be valuable to see how Cube-LLM performs on a wider range of 3D perception tasks, such as indoor scene understanding or 3D object detection. Evaluating the model's robustness to various types of 3D data and scenes would provide a more comprehensive understanding of its capabilities.
Overall, this work represents an exciting step forward in developing multi-modal language models with strong 3D perception abilities. Future research could explore ways to further enhance the model's 3D reasoning capabilities and expand its applicability to a wider range of 3D perception tasks.
Conclusion
This paper introduces a new multi-modal large language model called Cube-LLM that can ground and reason about images in 3-dimensional space. By pre-training Cube-LLM on a large-scale dataset called LV3D, which combines 2D and 3D recognition tasks, the researchers demonstrate that pure data scaling can lead to strong 3D perception capabilities without specialized architectural designs or training objectives.
Cube-LLM exhibits several intriguing properties, such as the ability to apply chain-of-thought prompting, follow complex instructions, and adapt to diverse input/output formats. Experiments show that Cube-LLM outperforms existing baselines on 3D grounded reasoning and complex reasoning about driving scenarios, and also performs competitively on general multi-modal language benchmarks.
This work highlights the potential for large language models to serve as powerful multi-modal perception and reasoning systems, capable of understanding the world in both 2D and 3D. By leveraging large-scale pretraining datasets and the remarkable capabilities of these models, researchers can continue to push the boundaries of what is possible in the field of artificial intelligence.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

When LLMs step into the 3D World: A Survey and Meta-Analysis of 3D Tasks via Multi-modal Large Language Models
Xianzheng Ma, Yash Bhalgat, Brandon Smart, Shuai Chen, Xinghui Li, Jian Ding, Jindong Gu, Dave Zhenyu Chen, Songyou Peng, Jia-Wang Bian, Philip H Torr, Marc Pollefeys, Matthias Nie{ss}ner, Ian D Reid, Angel X. Chang, Iro Laina, Victor Adrian Prisacariu
0
0
As large language models (LLMs) evolve, their integration with 3D spatial data (3D-LLMs) has seen rapid progress, offering unprecedented capabilities for understanding and interacting with physical spaces. This survey provides a comprehensive overview of the methodologies enabling LLMs to process, understand, and generate 3D data. Highlighting the unique advantages of LLMs, such as in-context learning, step-by-step reasoning, open-vocabulary capabilities, and extensive world knowledge, we underscore their potential to significantly advance spatial comprehension and interaction within embodied Artificial Intelligence (AI) systems. Our investigation spans various 3D data representations, from point clouds to Neural Radiance Fields (NeRFs). It examines their integration with LLMs for tasks such as 3D scene understanding, captioning, question-answering, and dialogue, as well as LLM-based agents for spatial reasoning, planning, and navigation. The paper also includes a brief review of other methods that integrate 3D and language. The meta-analysis presented in this paper reveals significant progress yet underscores the necessity for novel approaches to harness the full potential of 3D-LLMs. Hence, with this paper, we aim to chart a course for future research that explores and expands the capabilities of 3D-LLMs in understanding and interacting with the complex 3D world. To support this survey, we have established a project page where papers related to our topic are organized and listed: https://github.com/ActiveVisionLab/Awesome-LLM-3D.
5/17/2024

Reason3D: Searching and Reasoning 3D Segmentation via Large Language Model
Kuan-Chih Huang, Xiangtai Li, Lu Qi, Shuicheng Yan, Ming-Hsuan Yang
0
0
Recent advancements in multimodal large language models (LLMs) have shown their potential in various domains, especially concept reasoning. Despite these developments, applications in understanding 3D environments remain limited. This paper introduces Reason3D, a novel LLM designed for comprehensive 3D understanding. Reason3D takes point cloud data and text prompts as input to produce textual responses and segmentation masks, facilitating advanced tasks like 3D reasoning segmentation, hierarchical searching, express referring, and question answering with detailed mask outputs. Specifically, we propose a hierarchical mask decoder to locate small objects within expansive scenes. This decoder initially generates a coarse location estimate covering the object's general area. This foundational estimation facilitates a detailed, coarse-to-fine segmentation strategy that significantly enhances the precision of object identification and segmentation. Experiments validate that Reason3D achieves remarkable results on large-scale ScanNet and Matterport3D datasets for 3D express referring, 3D question answering, and 3D reasoning segmentation tasks. Code and models are available at: https://github.com/KuanchihHuang/Reason3D.
5/28/2024
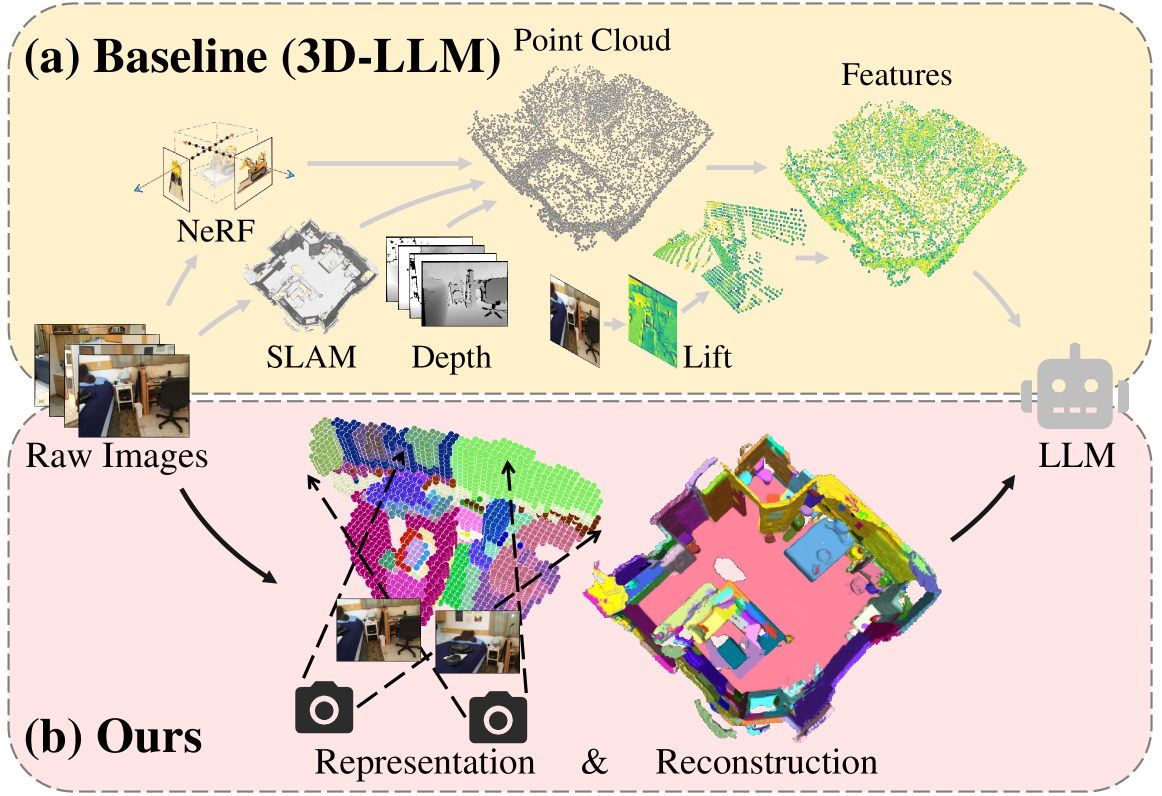
Unified Scene Representation and Reconstruction for 3D Large Language Models
Tao Chu, Pan Zhang, Xiaoyi Dong, Yuhang Zang, Qiong Liu, Jiaqi Wang
0
0
Enabling Large Language Models (LLMs) to interact with 3D environments is challenging. Existing approaches extract point clouds either from ground truth (GT) geometry or 3D scenes reconstructed by auxiliary models. Text-image aligned 2D features from CLIP are then lifted to point clouds, which serve as inputs for LLMs. However, this solution lacks the establishment of 3D point-to-point connections, leading to a deficiency of spatial structure information. Concurrently, the absence of integration and unification between the geometric and semantic representations of the scene culminates in a diminished level of 3D scene understanding. In this paper, we demonstrate the importance of having a unified scene representation and reconstruction framework, which is essential for LLMs in 3D scenes. Specifically, we introduce Uni3DR^2 extracts 3D geometric and semantic aware representation features via the frozen pre-trained 2D foundation models (e.g., CLIP and SAM) and a multi-scale aggregate 3D decoder. Our learned 3D representations not only contribute to the reconstruction process but also provide valuable knowledge for LLMs. Experimental results validate that our Uni3DR^2 yields convincing gains over the baseline on the 3D reconstruction dataset ScanNet (increasing F-Score by +1.8%). When applied to LLMs, our Uni3DR^2-LLM exhibits superior performance over the baseline on the 3D vision-language understanding dataset ScanQA (increasing BLEU-1 by +4.0% and +4.2% on the val set and test set, respectively). Furthermore, it outperforms the state-of-the-art method that uses additional GT point clouds on both ScanQA and 3DMV-VQA.
4/22/2024
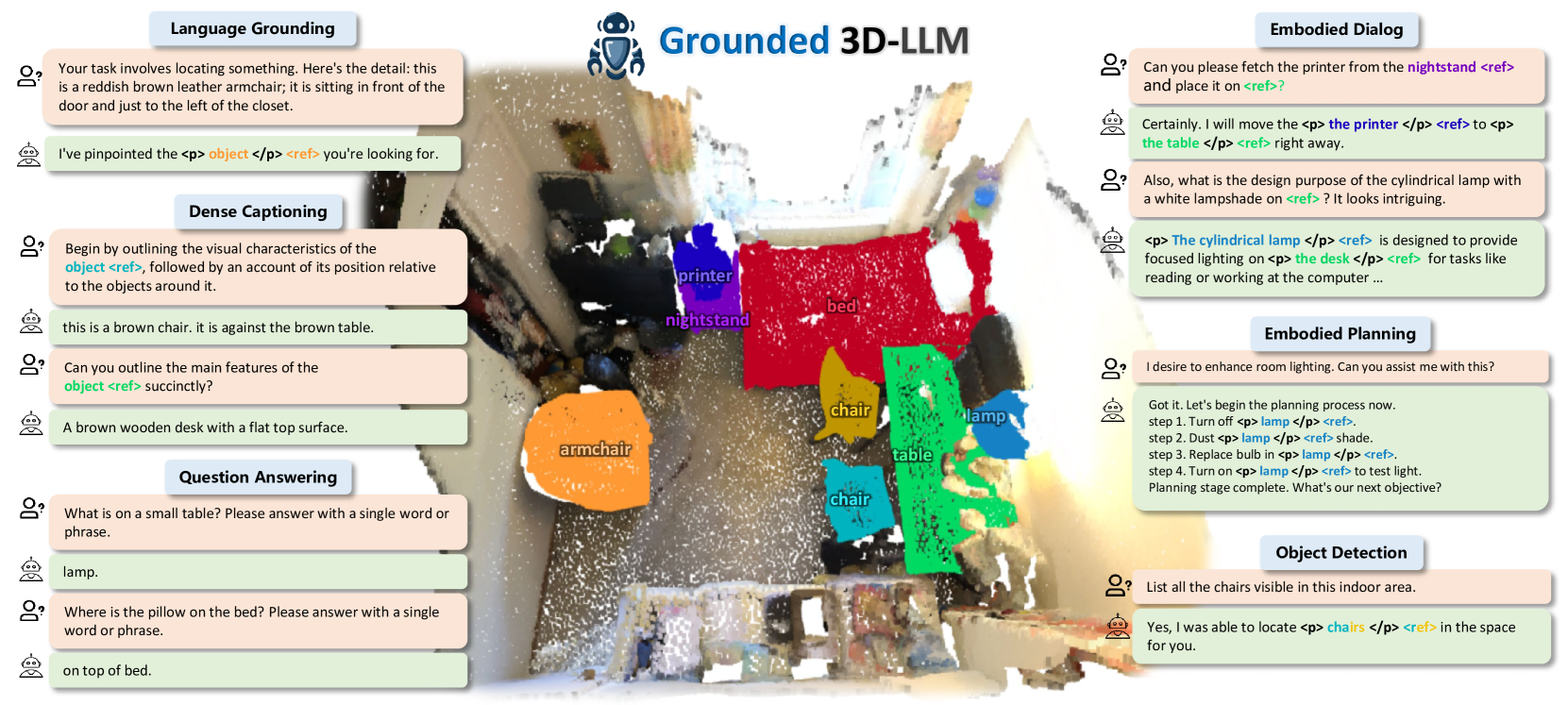
Grounded 3D-LLM with Referent Tokens
Yilun Chen, Shuai Yang, Haifeng Huang, Tai Wang, Ruiyuan Lyu, Runsen Xu, Dahua Lin, Jiangmiao Pang
0
0
Prior studies on 3D scene understanding have primarily developed specialized models for specific tasks or required task-specific fine-tuning. In this study, we propose Grounded 3D-LLM, which explores the potential of 3D large multi-modal models (3D LMMs) to consolidate various 3D vision tasks within a unified generative framework. The model uses scene referent tokens as special noun phrases to reference 3D scenes, enabling the handling of sequences that interleave 3D and textual data. It offers a natural approach for translating 3D vision tasks into language formats using task-specific instruction templates. To facilitate the use of referent tokens in subsequent language modeling, we have curated large-scale grounded language datasets that offer finer scene-text correspondence at the phrase level by bootstrapping existing object labels. Subsequently, we introduced Contrastive LAnguage-Scene Pre-training (CLASP) to effectively leverage this data, thereby integrating 3D vision with language models. Our comprehensive evaluation covers open-ended tasks like dense captioning and 3D QA, alongside close-ended tasks such as object detection and language grounding. Experiments across multiple 3D benchmarks reveal the leading performance and the broad applicability of Grounded 3D-LLM. Code and datasets will be released on the project page: https://groundedscenellm.github.io/grounded_3d-llm.github.io.
5/20/2024