Vision Language Models in Autonomous Driving: A Survey and Outlook
2310.14414
0
0
👀
Abstract
The applications of Vision-Language Models (VLMs) in the field of Autonomous Driving (AD) have attracted widespread attention due to their outstanding performance and the ability to leverage Large Language Models (LLMs). By incorporating language data, driving systems can gain a better understanding of real-world environments, thereby enhancing driving safety and efficiency. In this work, we present a comprehensive and systematic survey of the advances in vision language models in this domain, encompassing perception and understanding, navigation and planning, decision-making and control, end-to-end autonomous driving, and data generation. We introduce the mainstream VLM tasks in AD and the commonly utilized metrics. Additionally, we review current studies and applications in various areas and summarize the existing language-enhanced autonomous driving datasets thoroughly. Lastly, we discuss the benefits and challenges of VLMs in AD and provide researchers with the current research gaps and future trends.
Create account to get full access
Overview
- This paper explores the applications of Vision-Language Models (VLMs) in the field of Autonomous Driving (AD).
- VLMs leverage Large Language Models (LLMs) to enhance driving systems' understanding of real-world environments, leading to improved driving safety and efficiency.
- The paper presents a comprehensive survey of the advancements in VLMs for various AD tasks, including perception, navigation, decision-making, and end-to-end driving.
- The authors introduce mainstream VLM tasks, common metrics, and review current studies and applications across different areas of AD.
- The paper also examines the benefits and challenges of VLMs in AD and highlights future research directions.
Plain English Explanation
Vision-Language Models (VLMs) are a type of artificial intelligence that can combine visual information, like what a camera sees, with language data, like written descriptions or instructions. In the field of Autonomous Driving, researchers are exploring how VLMs can be used to help self-driving cars and trucks better understand their surroundings and make safer, more efficient decisions.
By incorporating language data, driving systems can gain a deeper understanding of real-world environments, such as the meanings of road signs, the functions of different objects, and the context of a driving situation. This can lead to improvements in the car's perception, navigation, and decision-making abilities, ultimately enhancing the overall safety and efficiency of autonomous driving.
The paper provides a comprehensive review of the various ways VLMs are being applied in the autonomous driving domain. It covers tasks like understanding what the car's cameras are seeing, planning the best route to take, and even controlling the vehicle's movements end-to-end. The authors also discuss the latest research studies, the datasets being used, and the key metrics used to evaluate the performance of these VLM-powered systems.
Overall, the integration of Vision-Language Models is seen as a promising direction for advancing the capabilities of autonomous driving technology, helping self-driving vehicles navigate the complexities of the real world more effectively.
Technical Explanation
This paper presents a systematic survey of the applications and advancements of Vision-Language Models (VLMs) in the field of Autonomous Driving (AD).
The authors highlight how VLMs, which leverage Large Language Models (LLMs), can enhance driving systems' understanding of real-world environments, leading to improved driving safety and efficiency. The paper covers a wide range of VLM-based tasks in AD, including perception and understanding, navigation and planning, decision-making and control, end-to-end autonomous driving, and data generation.
The researchers first introduce the mainstream VLM tasks in the AD domain and the commonly utilized evaluation metrics, such as automated model evaluation and multi-frame lightweight efficient VLMs. They then review the current studies and applications of VLMs across these different areas, highlighting the latest advancements and the underlying vision-language modeling approaches.
Additionally, the paper provides a thorough summary of the existing language-enhanced autonomous driving datasets, which play a crucial role in training and evaluating these VLM-based systems.
Finally, the authors discuss the benefits and challenges of employing VLMs in the AD domain, as well as the potential research gaps and future trends that warrant further exploration.
Critical Analysis
The paper presents a comprehensive and systematic review of the applications of Vision-Language Models (VLMs) in the field of Autonomous Driving (AD), which is a timely and relevant topic given the rapid advancements in both VLM and AD technologies.
One of the key strengths of the paper is the breadth of coverage, as it examines the integration of VLMs across various AD tasks, including perception, navigation, decision-making, and end-to-end driving. This provides readers with a holistic understanding of the potential impact of VLMs in this domain.
However, the paper could have delved deeper into the specific architectural details and technical innovations of the VLM-based approaches discussed, as well as their relative strengths and weaknesses compared to other state-of-the-art methods. A more in-depth analysis of the underlying vision-language modeling techniques and their suitability for different AD scenarios would have further strengthened the technical explanation.
Additionally, while the paper highlights the benefits of VLMs in enhancing driving safety and efficiency, it could have explored potential ethical and societal implications, such as the impact of language biases or the challenges of ensuring the fairness and accountability of these AI-powered driving systems.
Overall, the paper provides a valuable and comprehensive overview of the applications of VLMs in autonomous driving, and the insights and research directions outlined can serve as a useful reference for researchers and practitioners working in this exciting and rapidly evolving field.
Conclusion
This paper presents a comprehensive survey of the applications and advancements of Vision-Language Models (VLMs) in the field of Autonomous Driving (AD). The authors highlight how the incorporation of language data can enhance driving systems' understanding of real-world environments, leading to improved safety and efficiency in autonomous vehicles.
The paper covers a wide range of VLM-based tasks in AD, including perception, navigation, decision-making, and end-to-end driving. It also reviews the latest research studies, the commonly utilized evaluation metrics, and the existing language-enhanced autonomous driving datasets.
The authors discuss the benefits and challenges of employing VLMs in the AD domain, and provide valuable insights into the current research gaps and future trends. The integration of VLMs is shown to be a promising direction for advancing the capabilities of autonomous driving technology, helping self-driving vehicles navigate the complexities of the real world more effectively.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
👁️
DriveVLM: The Convergence of Autonomous Driving and Large Vision-Language Models
Xiaoyu Tian, Junru Gu, Bailin Li, Yicheng Liu, Yang Wang, Zhiyong Zhao, Kun Zhan, Peng Jia, Xianpeng Lang, Hang Zhao
0
0
A primary hurdle of autonomous driving in urban environments is understanding complex and long-tail scenarios, such as challenging road conditions and delicate human behaviors. We introduce DriveVLM, an autonomous driving system leveraging Vision-Language Models (VLMs) for enhanced scene understanding and planning capabilities. DriveVLM integrates a unique combination of reasoning modules for scene description, scene analysis, and hierarchical planning. Furthermore, recognizing the limitations of VLMs in spatial reasoning and heavy computational requirements, we propose DriveVLM-Dual, a hybrid system that synergizes the strengths of DriveVLM with the traditional autonomous driving pipeline. Experiments on both the nuScenes dataset and our SUP-AD dataset demonstrate the efficacy of DriveVLM and DriveVLM-Dual in handling complex and unpredictable driving conditions. Finally, we deploy the DriveVLM-Dual on a production vehicle, verifying it is effective in real-world autonomous driving environments.
6/26/2024
Exploring the Frontier of Vision-Language Models: A Survey of Current Methodologies and Future Directions
Akash Ghosh, Arkadeep Acharya, Sriparna Saha, Vinija Jain, Aman Chadha
0
0
The advent of Large Language Models (LLMs) has significantly reshaped the trajectory of the AI revolution. Nevertheless, these LLMs exhibit a notable limitation, as they are primarily adept at processing textual information. To address this constraint, researchers have endeavored to integrate visual capabilities with LLMs, resulting in the emergence of Vision-Language Models (VLMs). These advanced models are instrumental in tackling more intricate tasks such as image captioning and visual question answering. In our comprehensive survey paper, we delve into the key advancements within the realm of VLMs. Our classification organizes VLMs into three distinct categories: models dedicated to vision-language understanding, models that process multimodal inputs to generate unimodal (textual) outputs and models that both accept and produce multimodal inputs and outputs.This classification is based on their respective capabilities and functionalities in processing and generating various modalities of data.We meticulously dissect each model, offering an extensive analysis of its foundational architecture, training data sources, as well as its strengths and limitations wherever possible, providing readers with a comprehensive understanding of its essential components. We also analyzed the performance of VLMs in various benchmark datasets. By doing so, we aim to offer a nuanced understanding of the diverse landscape of VLMs. Additionally, we underscore potential avenues for future research in this dynamic domain, anticipating further breakthroughs and advancements.
4/16/2024
Automated Evaluation of Large Vision-Language Models on Self-driving Corner Cases
Kai Chen, Yanze Li, Wenhua Zhang, Yanxin Liu, Pengxiang Li, Ruiyuan Gao, Lanqing Hong, Meng Tian, Xinhai Zhao, Zhenguo Li, Dit-Yan Yeung, Huchuan Lu, Xu Jia
0
0
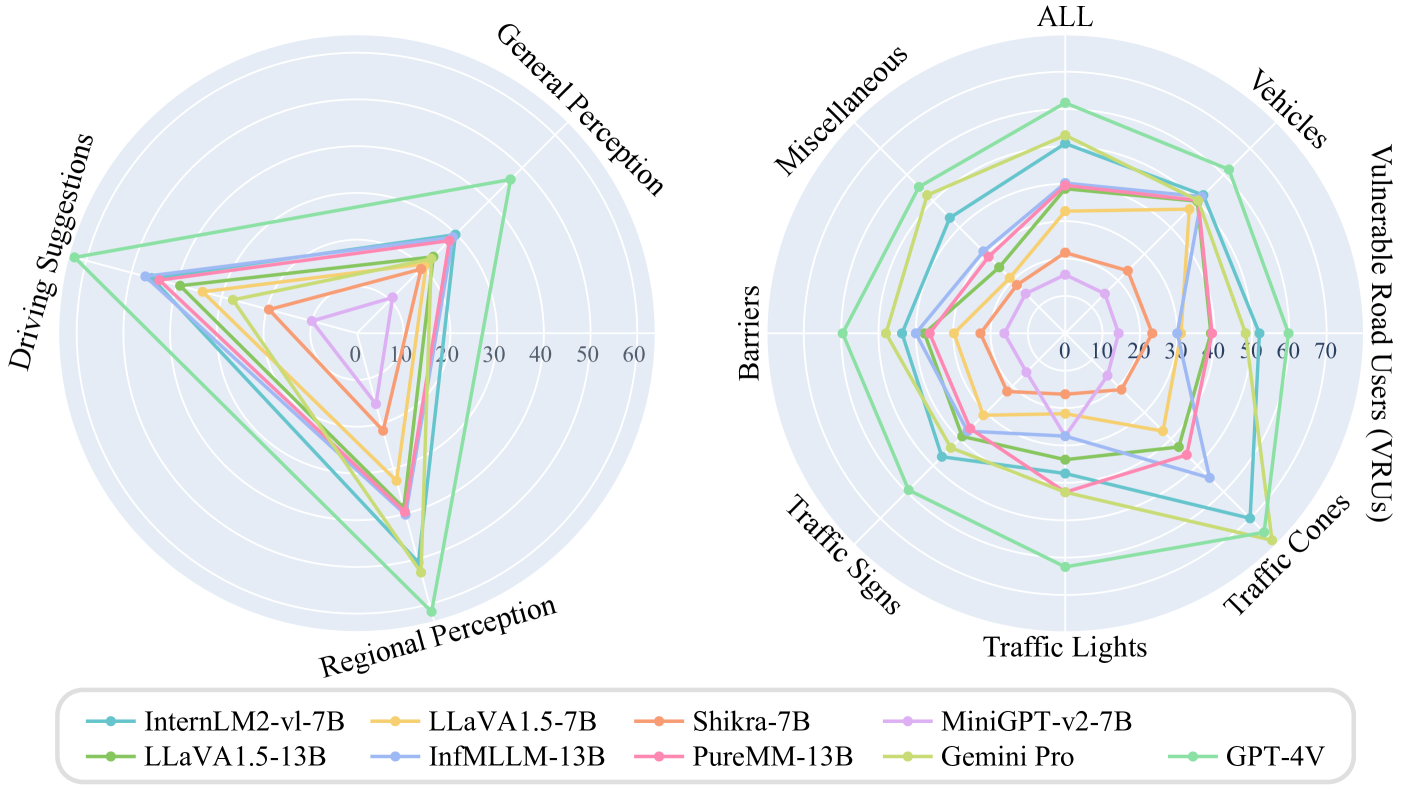
Large Vision-Language Models (LVLMs) have received widespread attention in advancing the interpretable self-driving. Existing evaluations of LVLMs primarily focus on the multi-faceted capabilities in natural circumstances, lacking automated and quantifiable assessment for self-driving, let alone the severe road corner cases. In this paper, we propose CODA-LM, the very first benchmark for the automatic evaluation of LVLMs for self-driving corner cases. We adopt a hierarchical data structure to prompt powerful LVLMs to analyze complex driving scenes and generate high-quality pre-annotation for human annotators, and for LVLM evaluation, we show that using the text-only large language models (LLMs) as judges reveals even better alignment with human preferences than the LVLM judges. Moreover, with CODA-LM, we build CODA-VLM, a new driving LVLM surpassing all the open-sourced counterparts on CODA-LM. Our CODA-VLM performs comparably with GPT-4V, even surpassing GPT-4V by +21.42% on the regional perception task. We hope CODA-LM can become the catalyst to promote interpretable self-driving empowered by LVLMs.
6/28/2024

An Introduction to Vision-Language Modeling
Florian Bordes, Richard Yuanzhe Pang, Anurag Ajay, Alexander C. Li, Adrien Bardes, Suzanne Petryk, Oscar Ma~nas, Zhiqiu Lin, Anas Mahmoud, Bargav Jayaraman, Mark Ibrahim, Melissa Hall, Yunyang Xiong, Jonathan Lebensold, Candace Ross, Srihari Jayakumar, Chuan Guo, Diane Bouchacourt, Haider Al-Tahan, Karthik Padthe, Vasu Sharma, Hu Xu, Xiaoqing Ellen Tan, Megan Richards, Samuel Lavoie, Pietro Astolfi, Reyhane Askari Hemmat, Jun Chen, Kushal Tirumala, Rim Assouel, Mazda Moayeri, Arjang Talattof, Kamalika Chaudhuri, Zechun Liu, Xilun Chen, Quentin Garrido, Karen Ullrich, Aishwarya Agrawal, Kate Saenko, Asli Celikyilmaz, Vikas Chandra
0
0
Following the recent popularity of Large Language Models (LLMs), several attempts have been made to extend them to the visual domain. From having a visual assistant that could guide us through unfamiliar environments to generative models that produce images using only a high-level text description, the vision-language model (VLM) applications will significantly impact our relationship with technology. However, there are many challenges that need to be addressed to improve the reliability of those models. While language is discrete, vision evolves in a much higher dimensional space in which concepts cannot always be easily discretized. To better understand the mechanics behind mapping vision to language, we present this introduction to VLMs which we hope will help anyone who would like to enter the field. First, we introduce what VLMs are, how they work, and how to train them. Then, we present and discuss approaches to evaluate VLMs. Although this work primarily focuses on mapping images to language, we also discuss extending VLMs to videos.
5/28/2024