Laser Learning Environment: A new environment for coordination-critical multi-agent tasks

0
💬
Sign in to get full access
Overview
- The paper introduces the Laser Learning Environment (LLE), a new multi-agent reinforcement learning environment that focuses on coordination between agents.
- In LLE, agents depend on each other to make progress (interdependence), must take specific joint actions to succeed (perfect coordination), and completing those actions does not provide any intermediate rewards (zero-incentive dynamics).
- The key challenge is escaping state space bottlenecks caused by the interdependence, as this is not rewarded.
- The paper tests multiple state-of-the-art multi-agent reinforcement learning algorithms on LLE and finds they consistently fail to solve the collaborative task due to their inability to escape these state space bottlenecks.
Plain English Explanation
The paper introduces a new virtual environment called the Laser Learning Environment (LLE) that is designed to test the coordination abilities of artificial intelligence (AI) agents. In this environment, the agents must work together closely to accomplish tasks, and they won't receive any rewards until they complete the entire sequence of required actions.
This creates a significant challenge, as the agents need to find ways to escape from "bottlenecks" in the state space, which are situations where they get stuck and can't make further progress. Escaping these bottlenecks is crucial for success, but it's not rewarded in the environment, so the agents have to figure out how to do it without any incentive.
The researchers tested several state-of-the-art multi-agent reinforcement learning algorithms on the LLE environment, and found that all of them consistently failed to solve the collaborative tasks. This was because these algorithms couldn't effectively escape the state space bottlenecks, even though they could successfully coordinate their actions.
The paper suggests that new methods are needed to solve this kind of cooperative multi-agent reinforcement learning problem, and that the LLE environment can serve as a useful benchmark for testing the coordination abilities of AI systems.
Technical Explanation
The paper introduces the Laser Learning Environment (LLE), a novel multi-agent reinforcement learning (MARL) environment designed to test the coordination capabilities of AI agents. In LLE, agents are highly interdependent, meaning they must work together to make progress. The agents must also take specific sequences of actions (perfect coordination) to succeed, and completing these joint actions does not yield any intermediate rewards (zero-incentive dynamics).
The key challenge in LLE is that agents must escape state space bottlenecks caused by the interdependence steps, as escaping these bottlenecks is not directly rewarded. The researchers test several state-of-the-art MARL algorithms, including value-based methods and techniques like prioritized experience replay and n-steps return, as well as intrinsic curiosity with random network distillation. However, they find that these algorithms consistently fail to solve the collaborative tasks in LLE due to their inability to effectively escape the state space bottlenecks, even though they can achieve perfect coordination.
The authors argue that this highlights the need for novel methods to solve such cooperative MARL problems, and they present the LLE environment as a relevant benchmark for testing the coordination capabilities of AI systems.
Critical Analysis
The paper makes a compelling case for the need to develop new approaches to solve cooperative multi-agent reinforcement learning problems, as exemplified by the Laser Learning Environment (LLE). The authors clearly identify the key challenge of escaping state space bottlenecks, which current state-of-the-art algorithms struggle with, despite their ability to achieve perfect coordination.
One limitation of the paper is that it does not provide a deeper analysis of why the tested algorithms fail to address the state space bottleneck problem. While the authors hypothesize that techniques like prioritized experience replay and intrinsic curiosity are not sufficient, more detailed explanations of the underlying reasons for these failures would be helpful.
Additionally, the paper could have explored potential directions for novel methods to solve the LLE problem more extensively. While the authors suggest that new approaches are needed, they do not provide specific ideas or hypotheses for how such methods might be developed.
Despite these minor limitations, the paper makes a valuable contribution by introducing the LLE environment as a useful benchmark for testing the coordination capabilities of multi-agent reinforcement learning systems. The consistent failure of state-of-the-art algorithms on this task highlights the importance of further research in this area, and the LLE environment provides a well-defined problem for researchers to focus on.
Conclusion
The Laser Learning Environment (LLE) introduced in this paper represents a significant challenge for current multi-agent reinforcement learning algorithms. By creating a scenario where agents must closely coordinate their actions and escape state space bottlenecks without any intermediate rewards, the LLE environment reveals the limitations of existing approaches.
The paper's findings suggest that novel methods are needed to address the unique challenges posed by cooperative multi-agent reinforcement learning problems. The LLE environment can serve as a valuable benchmark for testing the coordination capabilities of AI systems, and the insights gained from research in this area could have important implications for the development of more robust and effective multi-agent learning algorithms.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
💬
0
Laser Learning Environment: A new environment for coordination-critical multi-agent tasks
Yannick Molinghen, Raphael Avalos, Mark Van Achter, Ann Now'e, Tom Lenaerts
We introduce the Laser Learning Environment (LLE), a collaborative multi-agent reinforcement learning environment in which coordination is central. In LLE, agents depend on each other to make progress (interdependence), must jointly take specific sequences of actions to succeed (perfect coordination), and accomplishing those joint actions does not yield any intermediate reward (zero-incentive dynamics). The challenge of such problems lies in the difficulty of escaping state space bottlenecks caused by interdependence steps since escaping those bottlenecks is not rewarded. We test multiple state-of-the-art value-based MARL algorithms against LLE and show that they consistently fail at the collaborative task because of their inability to escape state space bottlenecks, even though they successfully achieve perfect coordination. We show that Q-learning extensions such as prioritized experience replay and n-steps return hinder exploration in environments with zero-incentive dynamics, and find that intrinsic curiosity with random network distillation is not sufficient to escape those bottlenecks. We demonstrate the need for novel methods to solve this problem and the relevance of LLE as cooperative MARL benchmark.
Read more4/5/2024

0
Decentralized multi-agent reinforcement learning algorithm using a cluster-synchronized laser network
Shun Kotoku, Takatomo Mihana, Andr'e Rohm, Ryoichi Horisaki
Multi-agent reinforcement learning (MARL) studies crucial principles that are applicable to a variety of fields, including wireless networking and autonomous driving. We propose a photonic-based decision-making algorithm to address one of the most fundamental problems in MARL, called the competitive multi-armed bandit (CMAB) problem. Our numerical simulations demonstrate that chaotic oscillations and cluster synchronization of optically coupled lasers, along with our proposed decentralized coupling adjustment, efficiently balance exploration and exploitation while facilitating cooperative decision-making without explicitly sharing information among agents. Our study demonstrates how decentralized reinforcement learning can be achieved by exploiting complex physical processes controlled by simple algorithms.
Read more7/15/2024
0
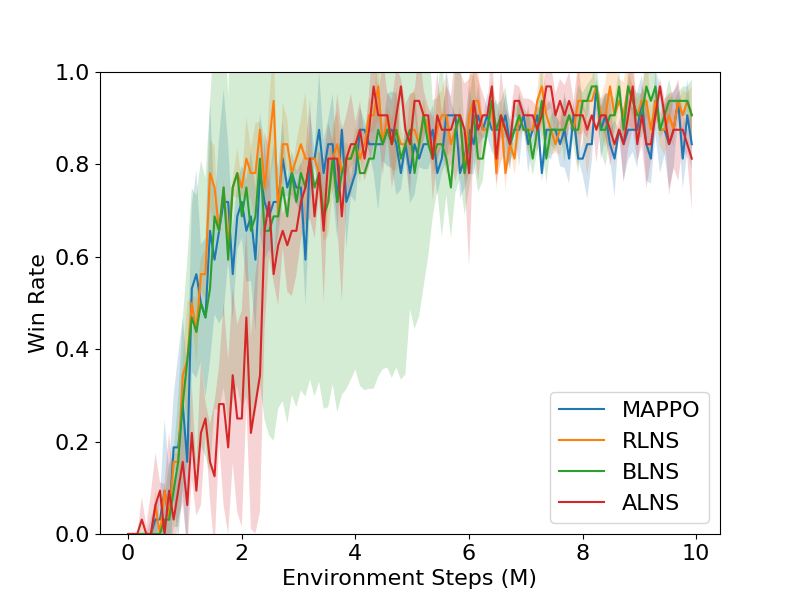
MARL-LNS: Cooperative Multi-agent Reinforcement Learning via Large Neighborhoods Search
Weizhe Chen, Sven Koenig, Bistra Dilkina
Cooperative multi-agent reinforcement learning (MARL) has been an increasingly important research topic in the last half-decade because of its great potential for real-world applications. Because of the curse of dimensionality, the popular centralized training decentralized execution framework requires a long time in training, yet still cannot converge efficiently. In this paper, we propose a general training framework, MARL-LNS, to algorithmically address these issues by training on alternating subsets of agents using existing deep MARL algorithms as low-level trainers, while not involving any additional parameters to be trained. Based on this framework, we provide three algorithm variants based on the framework: random large neighborhood search (RLNS), batch large neighborhood search (BLNS), and adaptive large neighborhood search (ALNS), which alternate the subsets of agents differently. We test our algorithms on both the StarCraft Multi-Agent Challenge and Google Research Football, showing that our algorithms can automatically reduce at least 10% of training time while reaching the same final skill level as the original algorithm.
Read more4/5/2024

0
eQMARL: Entangled Quantum Multi-Agent Reinforcement Learning for Distributed Cooperation over Quantum Channels
Alexander DeRieux, Walid Saad
Collaboration is a key challenge in distributed multi-agent reinforcement learning (MARL) environments. Learning frameworks for these decentralized systems must weigh the benefits of explicit player coordination against the communication overhead and computational cost of sharing local observations and environmental data. Quantum computing has sparked a potential synergy between quantum entanglement and cooperation in multi-agent environments, which could enable more efficient distributed collaboration with minimal information sharing. This relationship is largely unexplored, however, as current state-of-the-art quantum MARL (QMARL) implementations rely on classical information sharing rather than entanglement over a quantum channel as a coordination medium. In contrast, in this paper, a novel framework dubbed entangled QMARL (eQMARL) is proposed. The proposed eQMARL is a distributed actor-critic framework that facilitates cooperation over a quantum channel and eliminates local observation sharing via a quantum entangled split critic. Introducing a quantum critic uniquely spread across the agents allows coupling of local observation encoders through entangled input qubits over a quantum channel, which requires no explicit sharing of local observations and reduces classical communication overhead. Further, agent policies are tuned through joint observation-value function estimation via joint quantum measurements, thereby reducing the centralized computational burden. Experimental results show that eQMARL with ${Psi}^{+}$ entanglement converges to a cooperative strategy up to $17.8%$ faster and with a higher overall score compared to split classical and fully centralized classical and quantum baselines. The results also show that eQMARL achieves this performance with a constant factor of $25$-times fewer centralized parameters compared to the split classical baseline.
Read more5/29/2024