LayeredMAPF: a decomposition of MAPF instance without compromising solvability
2404.12773
0
0
Abstract
Generally, the calculation and memory space required for multi-agent path finding (MAPF) grows exponentially as the number of agents increases. This often results in some MAPF instances being unsolvable under limited computational resources and memory space, thereby limiting the application of MAPF in complex scenarios. Hence, we propose a decomposition approach for MAPF instances, which breaks down instances involving a large number of agents into multiple isolated subproblems involving fewer agents. Moreover, we present a framework to enable general MAPF algorithms to solve each subproblem independently and merge their solutions into one conflict-free final solution, without compromising on solvability. Unlike existing works that propose isolated methods aimed at reducing the time cost of MAPF, our method is applicable to all MAPF methods. In our results, we apply decomposition to multiple state-of-the-art MAPF methods using a classic MAPF benchmark (https://movingai.com/benchmarks/mapf.html). The decomposition of MAPF instances is completed on average within 1s, and its application to seven MAPF methods reduces the memory usage and time cost significantly, particularly for serial methods. To facilitate further research within the community, we have made the source code of the proposed algorithm publicly available (https://github.com/JoeYao-bit/LayeredMAPF).
Create account to get full access
Overview
- This paper presents a new approach called LayeredMAPF for solving the Multi-Agent Path Finding (MAPF) problem without compromising solvability.
- MAPF involves coordinating the paths of multiple agents to reach their goals while avoiding collisions.
- LayeredMAPF decomposes the MAPF instance into a set of smaller, more manageable subproblems that can be solved efficiently.
Plain English Explanation
The Multi-Agent Path Finding (MAPF) problem is about coordinating the movements of multiple agents, such as robots or autonomous vehicles, to reach their destinations without colliding with each other. This can be a challenging task, especially in complex environments with many obstacles and agents.
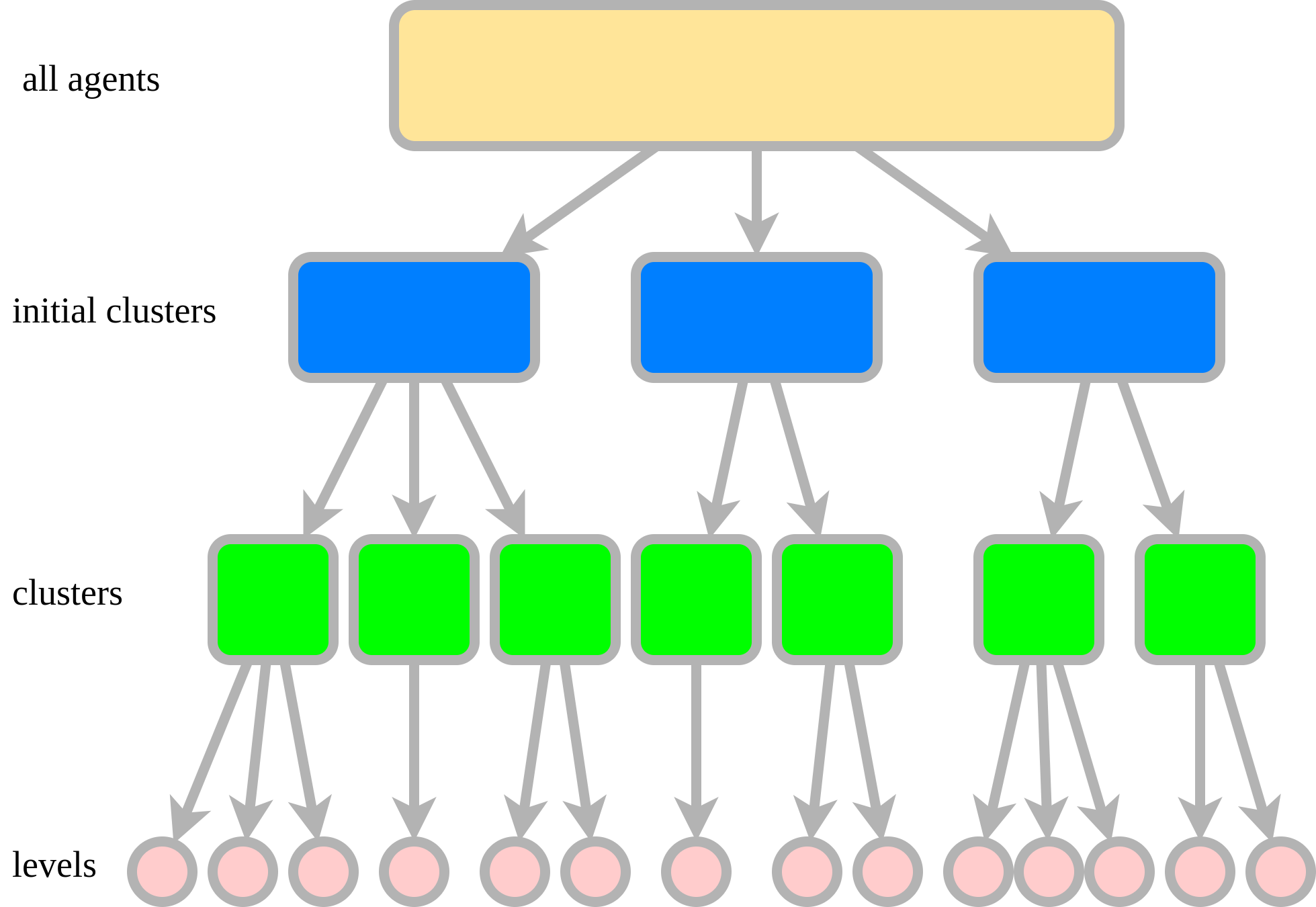
The paper introduces a new approach called LayeredMAPF that aims to solve MAPF instances more efficiently. The key idea is to break down the original MAPF problem into a set of smaller, more manageable subproblems. These subproblems are organized into layers, where each layer represents a different level of abstraction or granularity.
By decomposing the problem in this way, the researchers hope to find solutions more quickly and without compromising the overall solvability of the MAPF instance. This could be particularly useful in scenarios where the number of agents or the complexity of the environment makes the original MAPF problem difficult to solve using traditional methods.
Technical Explanation
The LayeredMAPF approach works by first constructing a hierarchical representation of the MAPF instance. This involves creating a graph-based model of the environment, where each node represents a location and the edges represent the possible movements between locations.
The researchers then divide this graph into smaller, non-overlapping subgraphs, or "layers." Each layer represents a different level of abstraction, with the lower layers capturing more detailed information about the environment and the movements of the agents, and the higher layers providing a more coarse-grained view.
To solve the MAPF instance, the algorithm first finds a high-level plan by solving the problem on the coarsest layer. It then refines this plan by solving the problem on the next layer down, and so on, until a complete solution is found that satisfies all the constraints of the original MAPF instance.
The researchers have shown that this layered approach can lead to significant performance improvements compared to traditional MAPF solvers, particularly in complex environments with many obstacles and agents.
Critical Analysis
The LayeredMAPF approach is an interesting and promising approach to solving MAPF problems, but it's important to consider some potential limitations and areas for further research.
One potential concern is the impact of the decomposition process on the solvability of the original MAPF instance. While the researchers claim that the LayeredMAPF approach does not compromise solvability, it's possible that the way the problem is decomposed could introduce additional constraints or limitations that make the overall problem harder to solve.
Additionally, the performance of the LayeredMAPF approach may be sensitive to the specific details of the MAPF instance, such as the number and distribution of agents, the complexity of the environment, and the specific goals and constraints of the agents. Further research may be needed to understand the broader applicability and robustness of the LayeredMAPF approach.
Finally, the paper does not provide a comprehensive comparison of the LayeredMAPF approach to other state-of-the-art MAPF solvers, which makes it difficult to assess the relative performance and advantages of the proposed method. Comparing LayeredMAPF to other approaches would be an important next step in evaluating the merits of this new technique.
Conclusion
The LayeredMAPF approach presented in this paper offers a promising new way to tackle the challenging problem of Multi-Agent Path Finding. By decomposing the MAPF instance into a set of smaller, more manageable subproblems, the researchers hope to find solutions more efficiently without compromising the overall solvability of the problem.
While the paper provides a solid technical foundation for the LayeredMAPF approach, further research is needed to fully understand its capabilities, limitations, and potential applications in real-world scenarios. Nonetheless, this work represents an important contribution to the field of MAPF and may inspire new avenues of research and development in this area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤖
Scaling Lifelong Multi-Agent Path Finding to More Realistic Settings: Research Challenges and Opportunities
He Jiang, Yulun Zhang, Rishi Veerapaneni, Jiaoyang Li
0
0
Multi-Agent Path Finding (MAPF) is the problem of moving multiple agents from starts to goals without collisions. Lifelong MAPF (LMAPF) extends MAPF by continuously assigning new goals to agents. We present our winning approach to the 2023 League of Robot Runners LMAPF competition, which leads us to several interesting research challenges and future directions. In this paper, we outline three main research challenges. The first challenge is to search for high-quality LMAPF solutions within a limited planning time (e.g., 1s per step) for a large number of agents (e.g., 10,000) or extremely high agent density (e.g., 97.7%). We present future directions such as developing more competitive rule-based and anytime MAPF algorithms and parallelizing state-of-the-art MAPF algorithms. The second challenge is to alleviate congestion and the effect of myopic behaviors in LMAPF algorithms. We present future directions, such as developing moving guidance and traffic rules to reduce congestion, incorporating future prediction and real-time search, and determining the optimal agent number. The third challenge is to bridge the gaps between the LMAPF models used in the literature and real-world applications. We present future directions, such as dealing with more realistic kinodynamic models, execution uncertainty, and evolving systems.
4/26/2024
🔎
Scalable Mechanism Design for Multi-Agent Path Finding
Paul Friedrich, Yulun Zhang, Michael Curry, Ludwig Dierks, Stephen McAleer, Jiaoyang Li, Tuomas Sandholm, Sven Seuken
0
0
Multi-Agent Path Finding (MAPF) involves determining paths for multiple agents to travel simultaneously and collision-free through a shared area toward given goal locations. This problem is computationally complex, especially when dealing with large numbers of agents, as is common in realistic applications like autonomous vehicle coordination. Finding an optimal solution is often computationally infeasible, making the use of approximate, suboptimal algorithms essential. Adding to the complexity, agents might act in a self-interested and strategic way, possibly misrepresenting their goals to the MAPF algorithm if it benefits them. Although the field of mechanism design offers tools to align incentives, using these tools without careful consideration can fail when only having access to approximately optimal outcomes. In this work, we introduce the problem of scalable mechanism design for MAPF and propose three strategyproof mechanisms, two of which even use approximate MAPF algorithms. We test our mechanisms on realistic MAPF domains with problem sizes ranging from dozens to hundreds of agents. We find that they improve welfare beyond a simple baseline.
5/9/2024

No Panacea in Planning: Algorithm Selection for Suboptimal Multi-Agent Path Finding
Weizhe Chen, Zhihan Wang, Jiaoyang Li, Sven Koenig, Bistra Dilkina
0
0
Since more and more algorithms are proposed for multi-agent path finding (MAPF) and each of them has its strengths, choosing the correct one for a specific scenario that fulfills some specified requirements is an important task. Previous research in algorithm selection for MAPF built a standard workflow and showed that machine learning can help. In this paper, we study general solvers for MAPF, which further include suboptimal algorithms. We propose different groups of optimization objectives and learning tasks to handle the new tradeoff between runtime and solution quality. We conduct extensive experiments to show that the same loss can not be used for different groups of optimization objectives, and that standard computer vision models are no worse than customized architecture. We also provide insightful discussions on how feature-sensitive pre-processing is needed for learning for MAPF, and how different learning metrics are correlated to different learning tasks.
4/5/2024

Algorithm Selection for Optimal Multi-Agent Path Finding via Graph Embedding
Carmel Shabalin, Omri Kaduri, Roni Stern
0
0
Multi-agent path finding (MAPF) is the problem of finding paths for multiple agents such that they do not collide. This problem manifests in numerous real-world applications such as controlling transportation robots in automated warehouses, moving characters in video games, and coordinating self-driving cars in intersections. Finding optimal solutions to MAPF is NP-Hard, yet modern optimal solvers can scale to hundreds of agents and even thousands in some cases. Different solvers employ different approaches, and there is no single state-of-the-art approach for all problems. Furthermore, there are no clear, provable, guidelines for choosing when each optimal MAPF solver to use. Prior work employed Algorithm Selection (AS) techniques to learn such guidelines from past data. A major challenge when employing AS for choosing an optimal MAPF algorithm is how to encode the given MAPF problem. Prior work either used hand-crafted features or an image representation of the problem. We explore graph-based encodings of the MAPF problem and show how they can be used on-the-fly with a modern graph embedding algorithm called FEATHER. Then, we show how this encoding can be effectively joined with existing encodings, resulting in a novel AS method we call MAPF Algorithm selection via Graph embedding (MAG). An extensive experimental evaluation of MAG on several MAPF algorithm selection tasks reveals that it is either on-par or significantly better than existing methods.
6/18/2024