A Learning-based Quadcopter Controller with Extreme Adaptation

0

Sign in to get full access
Overview
- This paper presents a learning-based quadcopter controller that can adapt to extreme conditions.
- The controller uses a deep neural network to learn a quadcopter's dynamics and control policies.
- The system demonstrates robust performance in the face of significant changes to the quadcopter's physical properties.
Plain English Explanation
The researchers developed a new control system for quadcopter drones that uses machine learning to adapt to different situations. Quadcopters are small flying robots that use four propellers to hover and move around. Controlling a quadcopter can be challenging, as their flight dynamics change depending on factors like the weight of the drone, the battery level, or whether it's carrying an extra payload.
The researchers' approach uses a deep neural network - a type of AI algorithm inspired by the human brain. The neural network learns the quadcopter's flight characteristics through practice flights, allowing it to adjust the control inputs (like how fast each propeller should spin) to maintain stable flight even when the drone's properties change. This "learning-based" approach is different from traditional quadcopter controllers, which rely on fixed mathematical models that can't adapt as well to dynamic conditions.
The paper shows that this adaptive controller can keep a quadcopter flying smoothly even when significant changes are made, like dramatically increasing the weight or altering the drone's aerodynamics. This could be valuable in real-world applications where quadcopters need to operate reliably under unpredictable conditions, such as delivering packages or inspecting infrastructure.
Technical Explanation
The core of the system is a deep neural network that acts as the quadcopter's controller. The network takes in sensor data about the drone's current state (position, orientation, velocity, etc.) and outputs the desired control inputs (e.g. thrust and torque for each motor) to maintain stable flight.
To train the neural network, the researchers first gathered data by having the quadcopter perform different flight maneuvers. This data was used to teach the network the nominal flight dynamics of the unmodified quadcopter. Then, the researchers introduced various physical changes to the drone, such as adding extra weight or altering the propellers. The neural network was further trained on data collected during these modified flight conditions, allowing it to learn how to adapt the control inputs accordingly.
During testing, the adaptive controller was able to maintain stable flight even when the quadcopter underwent significant changes, like doubling its weight or having one of its propellers removed. This was in contrast to a traditional non-adaptive controller, which struggled to cope with such extreme alterations to the drone's properties.
Critical Analysis
The paper demonstrates the impressive capabilities of this learning-based quadcopter controller, but there are a few important caveats to consider. First, the experiments were conducted in simulation rather than the real world, so further testing would be needed to verify the system's performance in physical environments with all their complexities.
Additionally, the training process requires collecting flight data under a wide range of conditions, which could be time-consuming and logistically challenging for real-world deployment. There may also be concerns about the safety and reliability of an AI-powered controller, especially in critical applications.
That said, the ability to adapt to extreme changes is a valuable trait for quadcopter systems, and this research represents an important step towards more robust and versatile drone control. Further work could explore ways to streamline the training process, ensure safe fallback behaviors, and validate the approach on physical hardware.
Conclusion
This paper presents an innovative learning-based quadcopter controller that can adapt to dramatic changes in the drone's physical properties. By using a deep neural network to learn the flight dynamics, the system demonstrates robust performance even when faced with significant modifications like increased weight or propeller damage.
While there are still some practical hurdles to overcome, this adaptive control approach holds promise for enhancing the reliability and versatility of quadcopter systems in real-world applications. As drone technology continues to advance, the ability to maintain stable and responsive flight under unpredictable conditions will become increasingly important.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!A Learning-based Quadcopter Controller with Extreme Adaptation
Dingqi Zhang, Antonio Loquercio, Jerry Tang, Ting-Hao Wang, Jitendra Malik, Mark W. Mueller
This paper introduces a learning-based low-level controller for quadcopters, which adaptively controls quadcopters with significant variations in mass, size, and actuator capabilities. Our approach leverages a combination of imitation learning and reinforcement learning, creating a fast-adapting and general control framework for quadcopters that eliminates the need for precise model estimation or manual tuning. The controller estimates a latent representation of the vehicle's system parameters from sensor-action history, enabling it to adapt swiftly to diverse dynamics. Extensive evaluations in simulation demonstrate the controller's ability to generalize to unseen quadcopter parameters, with an adaptation range up to 16 times broader than the training set. In real-world tests, the controller is successfully deployed on quadcopters with mass differences of 3.7 times and propeller constants varying by more than 100 times, while also showing rapid adaptation to disturbances such as off-center payloads and motor failures. These results highlight the potential of our controller in extreme adaptation to simplify the design process and enhance the reliability of autonomous drone operations in unpredictable environments. The video and code are at: https://github.com/muellerlab/xadapt_ctrl
Read more9/20/2024
0
Deep Reinforcement Learning-based Quadcopter Controller: A Practical Approach and Experiments
Truong-Dong Do, Nguyen Xuan Mung, Sung Kyung Hong
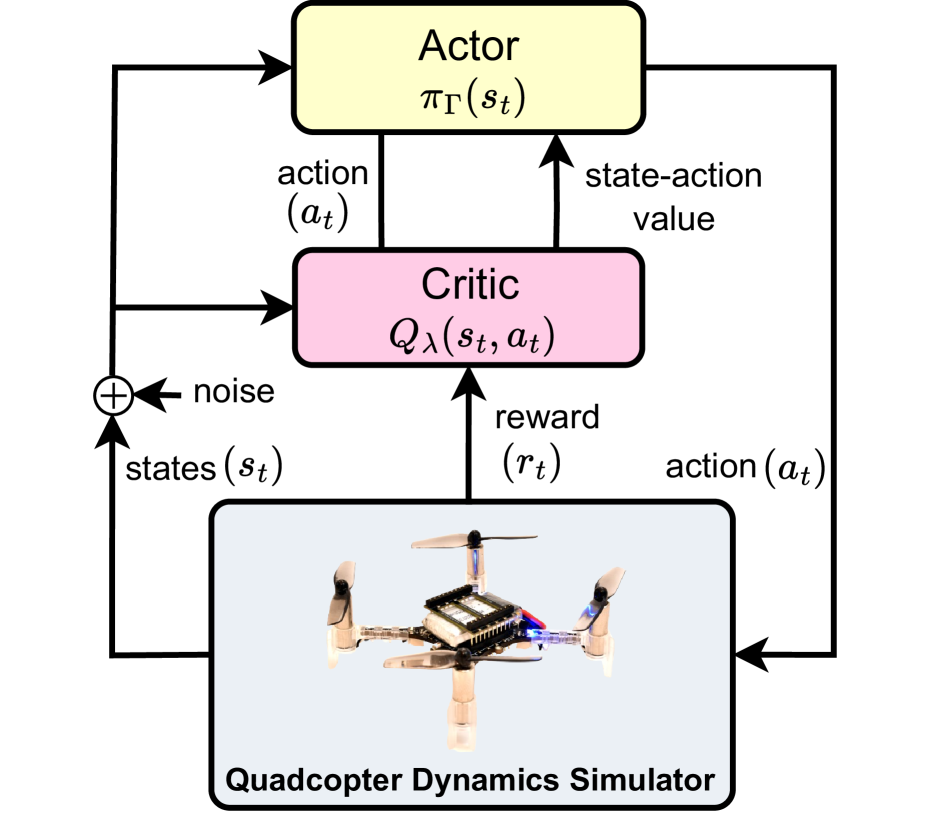
Quadcopters have been studied for decades thanks to their maneuverability and capability of operating in a variety of circumstances. However, quadcopters suffer from dynamical nonlinearity, actuator saturation, as well as sensor noise that make it challenging and time consuming to obtain accurate dynamic models and achieve satisfactory control performance. Fortunately, deep reinforcement learning came and has shown significant potential in system modelling and control of autonomous multirotor aerial vehicles, with recent advancements in deployment, performance enhancement, and generalization. In this paper, an end-to-end deep reinforcement learning-based controller for quadcopters is proposed that is secure for real-world implementation, data-efficient, and free of human gain adjustments. First, a novel actor-critic-based architecture is designed to map the robot states directly to the motor outputs. Then, a quadcopter dynamics-based simulator was devised to facilitate the training of the controller policy. Finally, the trained policy is deployed on a real Crazyflie nano quadrotor platform, without any additional fine-tuning process. Experimental results show that the quadcopter exhibits satisfactory performance as it tracks a given complicated trajectory, which demonstrates the effectiveness and feasibility of the proposed method and signifies its capability in filling the simulation-to-reality gap.
Read more6/19/2024
🗣️
0
Learning to Fly in Seconds
Jonas Eschmann, Dario Albani, Giuseppe Loianno
Learning-based methods, particularly Reinforcement Learning (RL), hold great promise for streamlining deployment, enhancing performance, and achieving generalization in the control of autonomous multirotor aerial vehicles. Deep RL has been able to control complex systems with impressive fidelity and agility in simulation but the simulation-to-reality transfer often brings a hard-to-bridge reality gap. Moreover, RL is commonly plagued by prohibitively long training times. In this work, we propose a novel asymmetric actor-critic-based architecture coupled with a highly reliable RL-based training paradigm for end-to-end quadrotor control. We show how curriculum learning and a highly optimized simulator enhance sample complexity and lead to fast training times. To precisely discuss the challenges related to low-level/end-to-end multirotor control, we also introduce a taxonomy that classifies the existing levels of control abstractions as well as non-linearities and domain parameters. Our framework enables Simulation-to-Reality (Sim2Real) transfer for direct RPM control after only 18 seconds of training on a consumer-grade laptop as well as its deployment on microcontrollers to control a multirotor under real-time guarantees. Finally, our solution exhibits competitive performance in trajectory tracking, as demonstrated through various experimental comparisons with existing state-of-the-art control solutions using a real Crazyflie nano quadrotor. We open source the code including a very fast multirotor dynamics simulator that can simulate about 5 months of flight per second on a laptop GPU. The fast training times and deployment to a cheap, off-the-shelf quadrotor lower the barriers to entry and help democratize the research and development of these systems.
Read more4/10/2024
🏋️
0
New!DroneDiffusion: Robust Quadrotor Dynamics Learning with Diffusion Models
Avirup Das, Rishabh Dev Yadav, Sihao Sun, Mingfei Sun, Samuel Kaski, Wei Pan
An inherent fragility of quadrotor systems stems from model inaccuracies and external disturbances. These factors hinder performance and compromise the stability of the system, making precise control challenging. Existing model-based approaches either make deterministic assumptions, utilize Gaussian-based representations of uncertainty, or rely on nominal models, all of which often fall short in capturing the complex, multimodal nature of real-world dynamics. This work introduces DroneDiffusion, a novel framework that leverages conditional diffusion models to learn quadrotor dynamics, formulated as a sequence generation task. DroneDiffusion achieves superior generalization to unseen, complex scenarios by capturing the temporal nature of uncertainties and mitigating error propagation. We integrate the learned dynamics with an adaptive controller for trajectory tracking with stability guarantees. Extensive experiments in both simulation and real-world flights demonstrate the robustness of the framework across a range of scenarios, including unfamiliar flight paths and varying payloads, velocities, and wind disturbances.
Read more9/18/2024