Learning Long-Horizon Predictions for Quadrotor Dynamics

0

Sign in to get full access
Overview
- This paper presents a deep learning approach for learning long-horizon predictions of quadrotor dynamics.
- The proposed method aims to improve the accuracy and robustness of quadrotor control by learning a high-fidelity model of the system dynamics.
- The authors evaluate their approach on simulated and real-world quadrotor experiments, demonstrating its effectiveness in generating accurate long-term predictions.
Plain English Explanation
The paper focuses on developing a deep learning-based method to predict the future behavior of a quadrotor drone over an extended time period. Quadrotors are a type of drone that uses four rotors to fly, and accurately modeling their complex dynamics is crucial for enabling advanced control and autonomous flight capabilities.
The researchers' approach involves training a neural network to learn a high-fidelity model of the quadrotor's dynamics, which can then be used to make long-term predictions about the drone's future state (e.g., position, velocity, orientation) over an extended time horizon. This is in contrast to traditional control methods that rely on short-term predictions, which can become less accurate as the time horizon increases.
By training the neural network on a large dataset of simulated and real-world quadrotor flight data, the researchers are able to capture the complex nonlinear relationships between the drone's inputs (e.g., rotor speeds) and its resulting motion. The resulting model can then be used to plan more robust and reliable flight trajectories, as it can anticipate the drone's future behavior with greater accuracy.
The authors evaluate their approach on both simulated and real-world quadrotor experiments, demonstrating its effectiveness in generating accurate long-term predictions compared to baseline methods. This represents an important step forward in enabling more advanced and autonomous quadrotor control capabilities, which could have applications in areas such as link to "Data-Driven System Identification of Quadrotors Subject to" and link to "Physics-Informed Neural Network for Multirotor Slung Load".
Technical Explanation
The paper proposes a deep learning-based approach for learning long-horizon predictions of quadrotor dynamics. The key elements of the research are as follows:
Experiment Design: The authors collect a large dataset of simulated and real-world quadrotor flight data, which includes measurements of the drone's state (position, velocity, orientation) and the control inputs (rotor speeds). This dataset is used to train and evaluate the proposed predictive model.
Model Architecture: The core of the approach is a neural network-based model that takes as input the current state of the quadrotor and the control inputs, and outputs predictions of the future state over an extended time horizon. The authors explore different network architectures, including recurrent and feed-forward designs, to optimize the model's predictive accuracy.
Training and Evaluation: The predictive model is trained using a combination of supervised learning and reinforcement learning techniques, with the goal of minimizing the error between the model's predictions and the ground truth observed in the dataset. The authors evaluate the model's performance on both simulated and real-world quadrotor experiments, comparing it to baseline methods.
Key Insights: The results demonstrate that the proposed approach can generate accurate long-term predictions of quadrotor dynamics, outperforming traditional control methods that rely on shorter-term predictions. The authors also show that the learned model is robust to uncertainties and disturbances, making it a promising approach for enabling advanced quadrotor control and autonomy.
Critical Analysis
The paper presents a well-designed and thorough evaluation of the proposed long-horizon prediction approach for quadrotor dynamics. The authors acknowledge several limitations and areas for future research:
- The dataset used for training and evaluation, while extensive, may not capture the full range of real-world operating conditions and environmental factors that can affect quadrotor behavior. Further validation on a more diverse dataset would be useful.
- The paper focuses on single-quadrotor scenarios, but the proposed approach may need to be extended to handle more complex multi-agent or swarming scenarios, as discussed in the link to "Physics-Informed Neural Network for Multirotor Slung Load" paper.
- The computational and memory requirements of the predictive model, especially for long-horizon predictions, could be a limiting factor for real-time implementation on resource-constrained platforms. Techniques to improve the model's efficiency would be valuable.
Despite these limitations, the paper represents an important contribution to the field of quadrotor control and autonomy. The ability to accurately predict long-term quadrotor behavior could enable more robust and reliable flight planning and control, with potential applications in areas such as link to "Deep Reinforcement Learning-Based Quadcopter Controller: Practical" and link to "Learning to Fly in Seconds". Further research and development in this direction could lead to significant advancements in drone technology and its practical applications.
Conclusion
This paper presents a deep learning-based approach for learning long-horizon predictions of quadrotor dynamics. By training a neural network model on a large dataset of simulated and real-world quadrotor flight data, the researchers are able to capture the complex nonlinear relationships between the drone's inputs and its resulting motion. The resulting predictive model can generate accurate long-term forecasts of the quadrotor's future state, which could enable more robust and reliable flight planning and control.
The authors' evaluation on both simulated and real-world experiments demonstrates the effectiveness of the proposed approach, which outperforms traditional control methods that rely on shorter-term predictions. While the paper identifies several limitations and areas for future research, it represents an important step forward in enabling more advanced and autonomous quadrotor capabilities, with potential applications in areas such as link to "TRACT: Training Dynamics-Aware Contrastive Learning Framework".
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Learning Long-Horizon Predictions for Quadrotor Dynamics
Pratyaksh Prabhav Rao, Alessandro Saviolo, Tommaso Castiglione Ferrari, Giuseppe Loianno
Accurate modeling of system dynamics is crucial for achieving high-performance planning and control of robotic systems. Although existing data-driven approaches represent a promising approach for modeling dynamics, their accuracy is limited to a short prediction horizon, overlooking the impact of compounding prediction errors over longer prediction horizons. Strategies to mitigate these cumulative errors remain underexplored. To bridge this gap, in this paper, we study the key design choices for efficiently learning long-horizon prediction dynamics for quadrotors. Specifically, we analyze the impact of multiple architectures, historical data, and multi-step loss formulation. We show that sequential modeling techniques showcase their advantage in minimizing compounding errors compared to other types of solutions. Furthermore, we propose a novel decoupled dynamics learning approach, which further simplifies the learning process while also enhancing the approach modularity. Extensive experiments and ablation studies on real-world quadrotor data demonstrate the versatility and precision of the proposed approach. Our outcomes offer several insights and methodologies for enhancing long-term predictive accuracy of learned quadrotor dynamics for planning and control.
Read more7/19/2024
📈
0
Active Learning of Discrete-Time Dynamics for Uncertainty-Aware Model Predictive Control
Alessandro Saviolo, Jonathan Frey, Abhishek Rathod, Moritz Diehl, Giuseppe Loianno
Model-based control requires an accurate model of the system dynamics for precisely and safely controlling the robot in complex and dynamic environments. Moreover, in the presence of variations in the operating conditions, the model should be continuously refined to compensate for dynamics changes. In this paper, we present a self-supervised learning approach that actively models the dynamics of nonlinear robotic systems. We combine offline learning from past experience and online learning from current robot interaction with the unknown environment. These two ingredients enable a highly sample-efficient and adaptive learning process, capable of accurately inferring model dynamics in real-time even in operating regimes that greatly differ from the training distribution. Moreover, we design an uncertainty-aware model predictive controller that is heuristically conditioned to the aleatoric (data) uncertainty of the learned dynamics. This controller actively chooses the optimal control actions that (i) optimize the control performance and (ii) improve the efficiency of online learning sample collection. We demonstrate the effectiveness of our method through a series of challenging real-world experiments using a quadrotor system. Our approach showcases high resilience and generalization capabilities by consistently adapting to unseen flight conditions, while it significantly outperforms classical and adaptive control baselines.
Read more9/4/2024
0
Deep Reinforcement Learning-based Quadcopter Controller: A Practical Approach and Experiments
Truong-Dong Do, Nguyen Xuan Mung, Sung Kyung Hong
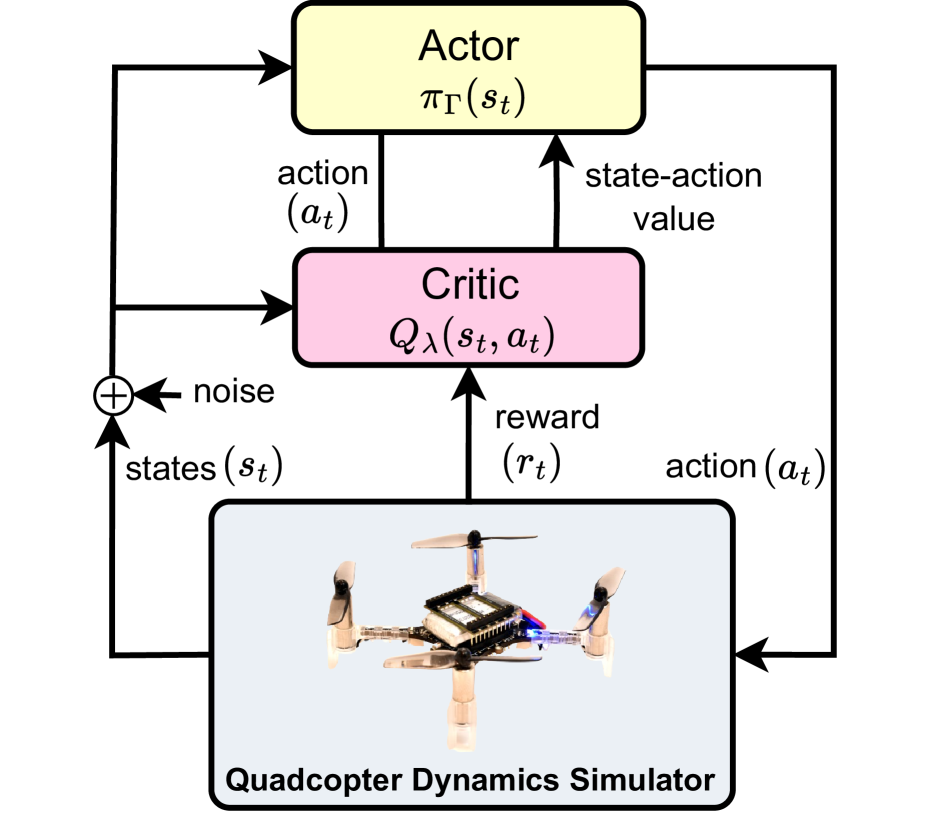
Quadcopters have been studied for decades thanks to their maneuverability and capability of operating in a variety of circumstances. However, quadcopters suffer from dynamical nonlinearity, actuator saturation, as well as sensor noise that make it challenging and time consuming to obtain accurate dynamic models and achieve satisfactory control performance. Fortunately, deep reinforcement learning came and has shown significant potential in system modelling and control of autonomous multirotor aerial vehicles, with recent advancements in deployment, performance enhancement, and generalization. In this paper, an end-to-end deep reinforcement learning-based controller for quadcopters is proposed that is secure for real-world implementation, data-efficient, and free of human gain adjustments. First, a novel actor-critic-based architecture is designed to map the robot states directly to the motor outputs. Then, a quadcopter dynamics-based simulator was devised to facilitate the training of the controller policy. Finally, the trained policy is deployed on a real Crazyflie nano quadrotor platform, without any additional fine-tuning process. Experimental results show that the quadcopter exhibits satisfactory performance as it tracks a given complicated trajectory, which demonstrates the effectiveness and feasibility of the proposed method and signifies its capability in filling the simulation-to-reality gap.
Read more6/19/2024
🗣️
0
Learning to Fly in Seconds
Jonas Eschmann, Dario Albani, Giuseppe Loianno
Learning-based methods, particularly Reinforcement Learning (RL), hold great promise for streamlining deployment, enhancing performance, and achieving generalization in the control of autonomous multirotor aerial vehicles. Deep RL has been able to control complex systems with impressive fidelity and agility in simulation but the simulation-to-reality transfer often brings a hard-to-bridge reality gap. Moreover, RL is commonly plagued by prohibitively long training times. In this work, we propose a novel asymmetric actor-critic-based architecture coupled with a highly reliable RL-based training paradigm for end-to-end quadrotor control. We show how curriculum learning and a highly optimized simulator enhance sample complexity and lead to fast training times. To precisely discuss the challenges related to low-level/end-to-end multirotor control, we also introduce a taxonomy that classifies the existing levels of control abstractions as well as non-linearities and domain parameters. Our framework enables Simulation-to-Reality (Sim2Real) transfer for direct RPM control after only 18 seconds of training on a consumer-grade laptop as well as its deployment on microcontrollers to control a multirotor under real-time guarantees. Finally, our solution exhibits competitive performance in trajectory tracking, as demonstrated through various experimental comparisons with existing state-of-the-art control solutions using a real Crazyflie nano quadrotor. We open source the code including a very fast multirotor dynamics simulator that can simulate about 5 months of flight per second on a laptop GPU. The fast training times and deployment to a cheap, off-the-shelf quadrotor lower the barriers to entry and help democratize the research and development of these systems.
Read more4/10/2024