Legibot: Generating Legible Motions for Service Robots Using Cost-Based Local Planners

0

Sign in to get full access
Overview
- This paper presents a method called "Legibot" for generating legible motions for service robots using cost-based local planners.
- The goal is to enable service robots to move in a way that is intuitive and understandable to human observers, improving human-robot interaction.
- The authors propose using a cost function that takes into account the legibility of the robot's motion, in addition to traditional motion planning objectives like efficiency.
- They evaluate their approach in simulated and real-world experiments, demonstrating improved legibility compared to traditional motion planning methods.
Plain English Explanation
The Legibot: Generating Legible Motions for Service Robots Using Cost-Based Local Planners paper addresses an important challenge in human-robot interaction: making a robot's movements easier for people to understand and anticipate.
When a service robot, like a delivery robot or a robot assistant, moves around, its motions can sometimes seem unpredictable or confusing to the humans it interacts with. This can make people feel uncomfortable or unsure of how to interact with the robot.
The researchers behind Legibot wanted to solve this problem by developing a new way for robots to plan their movements. Instead of just focusing on getting from point A to point B as quickly and efficiently as possible, Legibot also considers how "legible" or understandable the robot's motions will be to people watching.
The key idea is to have the robot's motion planning system use a special "cost function" that balances traditional efficiency goals with the need to make the robot's movements clear and predictable. This way, the robot will choose paths and trajectories that not only get the job done, but also look natural and intuitive to human observers.
The paper describes experiments where the Legibot approach was tested, both in simulation and in the real world. The results showed that Legibot-powered robots were able to generate motions that were more legible and understandable compared to traditional motion planning methods.
Overall, the Legibot work is an important step towards making service robots that can move and behave in ways that are more natural and intuitive for the humans they interact with. By considering legibility as a key factor in motion planning, the researchers hope to improve the comfort and trust people feel when working alongside these robotic assistants.
Technical Explanation
The Legibot: Generating Legible Motions for Service Robots Using Cost-Based Local Planners paper proposes a method for generating legible motions for service robots using cost-based local planners.
The core idea is to modify the robot's motion planning cost function to include a term that encourages legible, predictable movements. Traditionally, motion planners focus on optimizing for efficiency, such as minimizing travel distance or time. However, the authors argue that for service robots interacting with humans, legibility is also a crucial factor to consider.
To achieve this, the authors introduce a "legibility cost" that captures how understandable and predictable the robot's motion would be to a human observer. This legibility cost is based on factors like the robot's orientation, velocity, and trajectory shape. By incorporating this legibility cost into the overall motion planning objective, the robot is encouraged to choose paths and motions that not only reach the goal efficiently, but also appear natural and intuitive to humans.
The authors evaluate their Legibot approach through both simulated and real-world experiments. In the simulated environment, they compare the legibility of Legibot's motions to those generated by a traditional motion planner. The results show that Legibot-powered robots are able to produce significantly more legible movements.
In the real-world experiments, the authors deploy a mobile robot equipped with the Legibot system and have it interact with human participants. They measure the participants' perceptions of the robot's legibility and predictability, as well as their overall comfort level during the interaction. The results demonstrate that the Legibot approach leads to improved legibility and higher levels of human comfort compared to a baseline motion planning method.
The Legibot work highlights the importance of considering legibility as a key factor in motion planning for service robots. By incorporating legibility into the cost function, the robots are able to generate motions that are more intuitive and understandable to the humans they interact with, which can lead to better human-robot collaboration and increased trust.
Critical Analysis
The Legibot: Generating Legible Motions for Service Robots Using Cost-Based Local Planners paper presents a promising approach to improving the legibility of robot motions, but it also has some potential limitations and areas for further research.
One potential limitation is that the legibility cost function used in the Legibot system is based on heuristics and may not capture all the nuances of human perception. The authors acknowledge this and suggest that more advanced models of human cognition and attention could be incorporated to refine the legibility cost function.
Additionally, the real-world experiments in the paper were conducted in a relatively controlled laboratory setting. It would be valuable to see how the Legibot system performs in more complex, real-world environments with greater clutter, dynamic obstacles, and diverse human behaviors.
Another area for further research could be exploring how the Legibot approach could be extended to more complex robotic systems, such as quadrupedal robots or multi-agent scenarios. Adapting the legibility cost function and motion planning algorithms to handle these more complex situations could further enhance the applicability of the Legibot system.
It would also be interesting to investigate how the Legibot approach could be combined with other techniques for improving human-robot interaction, such as natural language-based reasoning or augmented telepresence. Integrating these complementary approaches could lead to even more natural and intuitive interactions between humans and service robots.
Overall, the Legibot work represents an important step forward in the field of human-robot interaction, and the authors have identified a crucial challenge in making robot motions more legible and understandable to human observers. With further refinement and exploration of the approach, it has the potential to significantly improve the way people perceive and interact with service robots in a variety of real-world settings.
Conclusion
The Legibot: Generating Legible Motions for Service Robots Using Cost-Based Local Planners paper presents a novel approach to motion planning for service robots that prioritizes the legibility and predictability of the robot's movements. By incorporating a legibility cost function into the motion planning process, the Legibot system is able to generate motions that are more intuitive and understandable to human observers, improving the overall human-robot interaction.
The key contribution of this work is the recognition that legibility is a crucial factor to consider in addition to traditional motion planning objectives like efficiency. The authors demonstrate the effectiveness of their approach through both simulated and real-world experiments, showing that Legibot-powered robots are able to achieve higher levels of legibility and human comfort compared to traditional motion planning methods.
This research has important implications for the field of human-robot interaction, as it highlights the need to design robot behaviors that are not only functional, but also socially and cognitively aligned with human expectations. By making robot motions more legible and predictable, the Legibot system can help to build trust, comfort, and more natural collaboration between humans and their robotic assistants.
As service robots become increasingly prevalent in our daily lives, the ability to generate legible and intuitive motions will be essential for enabling seamless and effective human-robot interaction. The Legibot work represents an important step towards this goal, and it will be exciting to see how this approach can be further refined and applied in real-world settings.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Legibot: Generating Legible Motions for Service Robots Using Cost-Based Local Planners
Javad Amirian, Mouad Abrini, Mohamed Chetouani
With the increasing presence of social robots in various environments and applications, there is an increasing need for these robots to exhibit socially-compliant behaviors. Legible motion, characterized by the ability of a robot to clearly and quickly convey intentions and goals to the individuals in its vicinity, through its motion, holds significant importance in this context. This will improve the overall user experience and acceptance of robots in human environments. In this paper, we introduce a novel approach to incorporate legibility into local motion planning for mobile robots. This can enable robots to generate legible motions in real-time and dynamic environments. To demonstrate the effectiveness of our proposed methodology, we also provide a robotic stack designed for deploying legibility-aware motion planning in a social robot, by integrating perception and localization components.
Read more4/9/2024
0
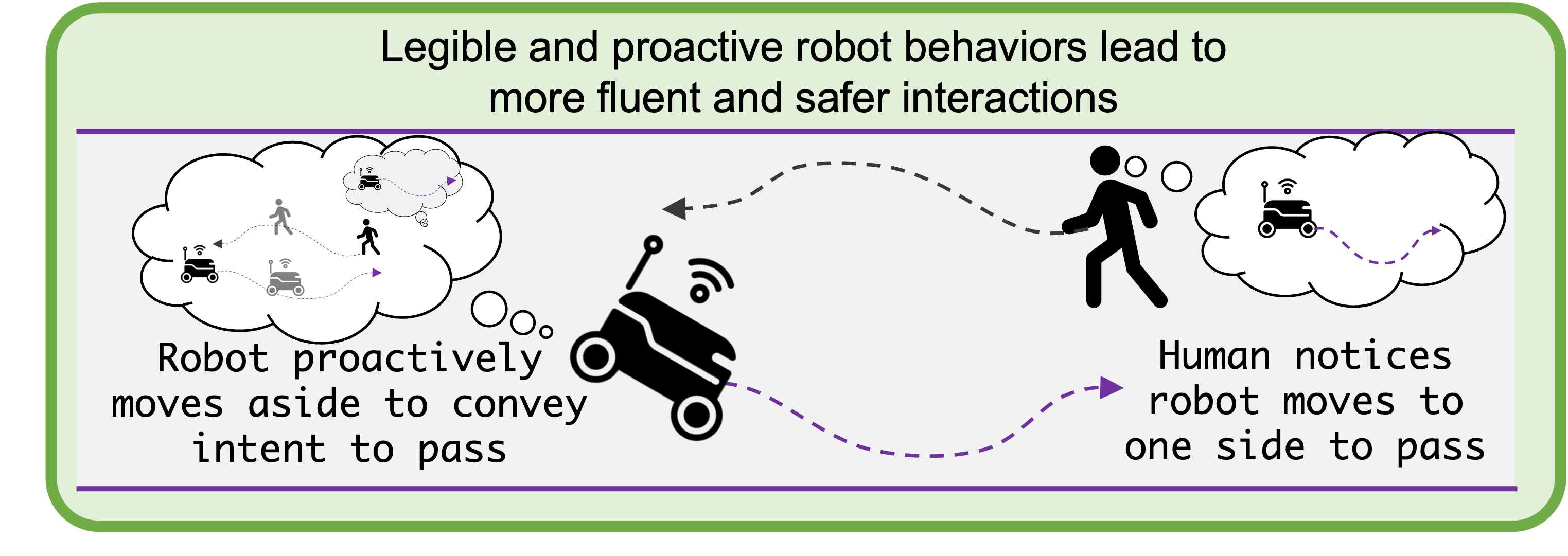
Legible and Proactive Robot Planning for Prosocial Human-Robot Interactions
Jasper Geldenbott, Karen Leung
Humans have a remarkable ability to fluently engage in joint collision avoidance in crowded navigation tasks despite the complexities and uncertainties inherent in human behavior. Underlying these interactions is a mutual understanding that (i) individuals are prosocial, that is, there is equitable responsibility in avoiding collisions, and (ii) individuals should behave legibly, that is, move in a way that clearly conveys their intent to reduce ambiguity in how they intend to avoid others. Toward building robots that can safely and seamlessly interact with humans, we propose a general robot trajectory planning framework for synthesizing legible and proactive behaviors and demonstrate that our robot planner naturally leads to prosocial interactions. Specifically, we introduce the notion of a markup factor to incentivize legible and proactive behaviors and an inconvenience budget constraint to ensure equitable collision avoidance responsibility. We evaluate our approach against well-established multi-agent planning algorithms and show that using our approach produces safe, fluent, and prosocial interactions. We demonstrate the real-time feasibility of our approach with human-in-the-loop simulations. Project page can be found at https://uw-ctrl.github.io/phri/.
Read more4/8/2024

0
Through the Clutter: Exploring the Impact of Complex Environments on the Legibility of Robot Motion
Melanie Schmidt-Wolf, Tyler Becker, Denielle Oliva, Monica Nicolescu, David Feil-Seifer
The environments in which the collaboration of a robot would be the most helpful to a person are frequently uncontrolled and cluttered with many objects present. Legible robot arm motion is crucial in tasks like these in order to avoid possible collisions, improve the workflow and help ensure the safety of the person. Prior work in this area, however, focuses on solutions that are tested only in uncluttered environments and there are not many results taken from cluttered environments. In this research we present a measure for clutteredness based on an entropic measure of the environment, and a novel motion planner based on potential fields. Both our measures and the planner were tested in a cluttered environment meant to represent a more typical tool sorting task for which the person would collaborate with a robot. The in-person validation study with Baxter robots shows a significant improvement in legibility of our proposed legible motion planner compared to the current state-of-the-art legible motion planner in cluttered environments. Further, the results show a significant difference in the performance of the planners in cluttered and uncluttered environments, and the need to further explore legible motion in cluttered environments. We argue that the inconsistency of our results in cluttered environments with those obtained from uncluttered environments points out several important issues with the current research performed in the area of legible motion planners.
Read more6/4/2024
0
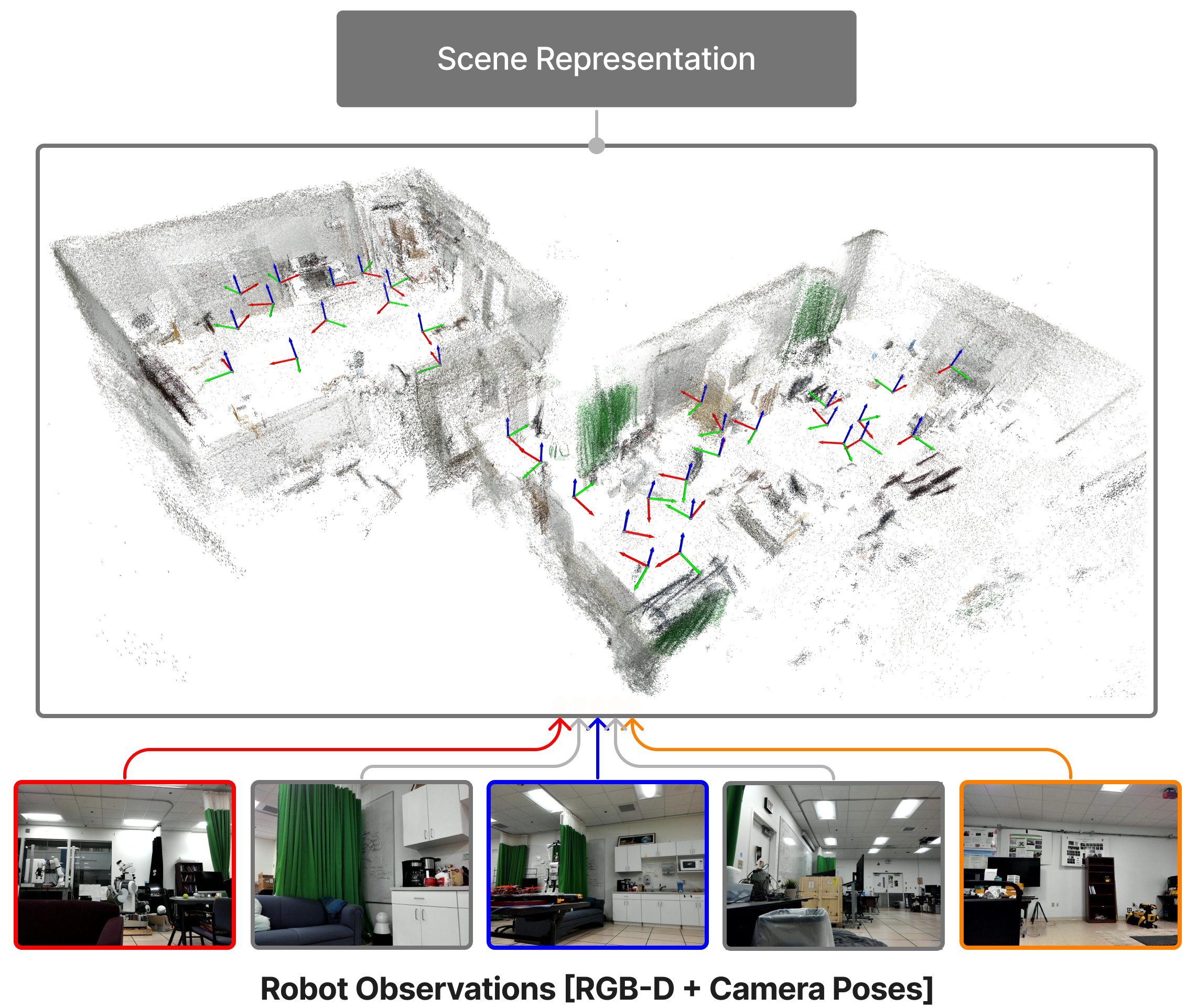
Verifiably Following Complex Robot Instructions with Foundation Models
Benedict Quartey, Eric Rosen, Stefanie Tellex, George Konidaris
Enabling mobile robots to follow complex natural language instructions is an important yet challenging problem. People want to flexibly express constraints, refer to arbitrary landmarks and verify behavior when instructing robots. Conversely, robots must disambiguate human instructions into specifications and ground instruction referents in the real world. We propose Language Instruction grounding for Motion Planning (LIMP), an approach that enables robots to verifiably follow expressive and complex open-ended instructions in real-world environments without prebuilt semantic maps. LIMP constructs a symbolic instruction representation that reveals the robot's alignment with an instructor's intended motives and affords the synthesis of robot behaviors that are correct-by-construction. We perform a large scale evaluation and demonstrate our approach on 150 instructions in five real-world environments showing the generality of our approach and the ease of deployment in novel unstructured domains. In our experiments, LIMP performs comparably with state-of-the-art LLM task planners and LLM code-writing planners on standard open vocabulary tasks and additionally achieves 79% success rate on complex spatiotemporal instructions while LLM and Code-writing planners both achieve 38%. See supplementary materials and demo videos at https://robotlimp.github.io
Read more7/9/2024