LEROjD: Lidar Extended Radar-Only Object Detection

0
🔎
Sign in to get full access
Overview
- Accurate 3D object detection is crucial for automated driving
- Lidar sensors are well-suited but expensive and limited in adverse weather
- 3+1D imaging radar sensors offer a cost-effective, robust alternative
- Existing 3+1D imaging radar datasets include radar and lidar data
- Two strategies to transfer knowledge from lidar to radar-only object detectors:
- Multi-stage training with sequential lidar point cloud thin-out
- Cross-modal knowledge distillation
Plain English Explanation
Automated driving requires accurate 3D detection of objects on the road. Lidar sensors can do this well, but they are expensive and don't work as well in bad weather. Radar sensors are a cheaper and more robust alternative, but their low resolution and high measurement noise make 3D object detection challenging.
The researchers explored two ways to use data from lidar sensors to improve radar-only object detectors, without relying on lidar during actual use. In the first approach, they trained the radar model in stages, gradually reducing the amount of lidar data used. This allowed the model to learn from the higher-quality lidar data at first, then adapt to using only radar data.
The second approach was "knowledge distillation," where the radar model was initialized with the weights learned by a lidar-based model. This transferred useful information from the lidar model to the radar-only model, giving it a head start.
Both of these techniques significantly boosted the performance of the radar-only object detectors, without changing their underlying architecture. This makes them applicable to other 3D object detection models as well.
Technical Explanation
The paper explores two strategies to transfer knowledge from lidar to radar-only 3D object detection models:
-
Multi-stage training with sequential lidar point cloud thin-out: The researchers trained the radar model in three stages, progressively reducing the density of the lidar point cloud used for training. This allowed the model to initially learn from the high-quality lidar data, then adapt to using only radar data.
-
Cross-modal knowledge distillation: The researchers used a lidar-based "teacher" model to initialize the weights of the radar-only "student" model. This transferred useful information from the teacher to the student, giving the radar model a head start.
The researchers tested these approaches on two different 3D object detection networks. Their results show significant performance gains of up to 4.2 percentage points in mean Average Precision with multi-stage training, and up to 3.9 percentage points with knowledge distillation.
Critical Analysis
The paper presents a well-designed study that effectively leverages lidar data to improve radar-only 3D object detection. The multi-stage training and knowledge distillation approaches are thoughtful and well-executed.
One potential limitation is the reliance on existing 3+1D imaging radar datasets that include lidar data. The availability of such datasets may be a constraint for researchers and practitioners trying to apply these techniques.
Additionally, the paper does not explore the impact of different lidar thin-out methods or knowledge distillation techniques in depth. Further research could investigate these variables and their effects on performance.
Overall, the paper makes a valuable contribution to the field of 3D object detection for automated driving, providing practical techniques that can be applied to a variety of model architectures.
Conclusion
This paper presents two effective strategies for using lidar data to improve the performance of radar-only 3D object detection models, which are crucial for automated driving systems. The multi-stage training and knowledge distillation approaches demonstrate significant performance gains without modifying the underlying model architectures, making them widely applicable.
These techniques help address the limitations of radar sensors while maintaining the cost-effectiveness and robustness advantages they offer. By bridging the gap between lidar and radar-based 3D object detection, this research brings us closer to reliable, affordable automated driving systems that can operate in a variety of environmental conditions.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔎
0
LEROjD: Lidar Extended Radar-Only Object Detection
Patrick Palmer, Martin Kruger, Stefan Schutte, Richard Altendorfer, Ganesh Adam, Torsten Bertram
Accurate 3D object detection is vital for automated driving. While lidar sensors are well suited for this task, they are expensive and have limitations in adverse weather conditions. 3+1D imaging radar sensors offer a cost-effective, robust alternative but face challenges due to their low resolution and high measurement noise. Existing 3+1D imaging radar datasets include radar and lidar data, enabling cross-modal model improvements. Although lidar should not be used during inference, it can aid the training of radar-only object detectors. We explore two strategies to transfer knowledge from the lidar to the radar domain and radar-only object detectors: 1. multi-stage training with sequential lidar point cloud thin-out, and 2. cross-modal knowledge distillation. In the multi-stage process, three thin-out methods are examined. Our results show significant performance gains of up to 4.2 percentage points in mean Average Precision with multi-stage training and up to 3.9 percentage points with knowledge distillation by initializing the student with the teacher's weights. The main benefit of these approaches is their applicability to other 3D object detection networks without altering their architecture, as we show by analyzing it on two different object detectors. Our code is available at https://github.com/rst-tu-dortmund/lerojd
Read more9/10/2024
🔎
0
Multi-Object Tracking based on Imaging Radar 3D Object Detection
Patrick Palmer, Martin Kruger, Richard Altendorfer, Torsten Bertram
Effective tracking of surrounding traffic participants allows for an accurate state estimation as a necessary ingredient for prediction of future behavior and therefore adequate planning of the ego vehicle trajectory. One approach for detecting and tracking surrounding traffic participants is the combination of a learning based object detector with a classical tracking algorithm. Learning based object detectors have been shown to work adequately on lidar and camera data, while learning based object detectors using standard radar data input have proven to be inferior. Recently, with the improvements to radar sensor technology in the form of imaging radars, the object detection performance on radar was greatly improved but is still limited compared to lidar sensors due to the sparsity of the radar point cloud. This presents a unique challenge for the task of multi-object tracking. The tracking algorithm must overcome the limited detection quality while generating consistent tracks. To this end, a comparison between different multi-object tracking methods on imaging radar data is required to investigate its potential for downstream tasks. The work at hand compares multiple approaches and analyzes their limitations when applied to imaging radar data. Furthermore, enhancements to the presented approaches in the form of probabilistic association algorithms are considered for this task.
Read more6/4/2024
0
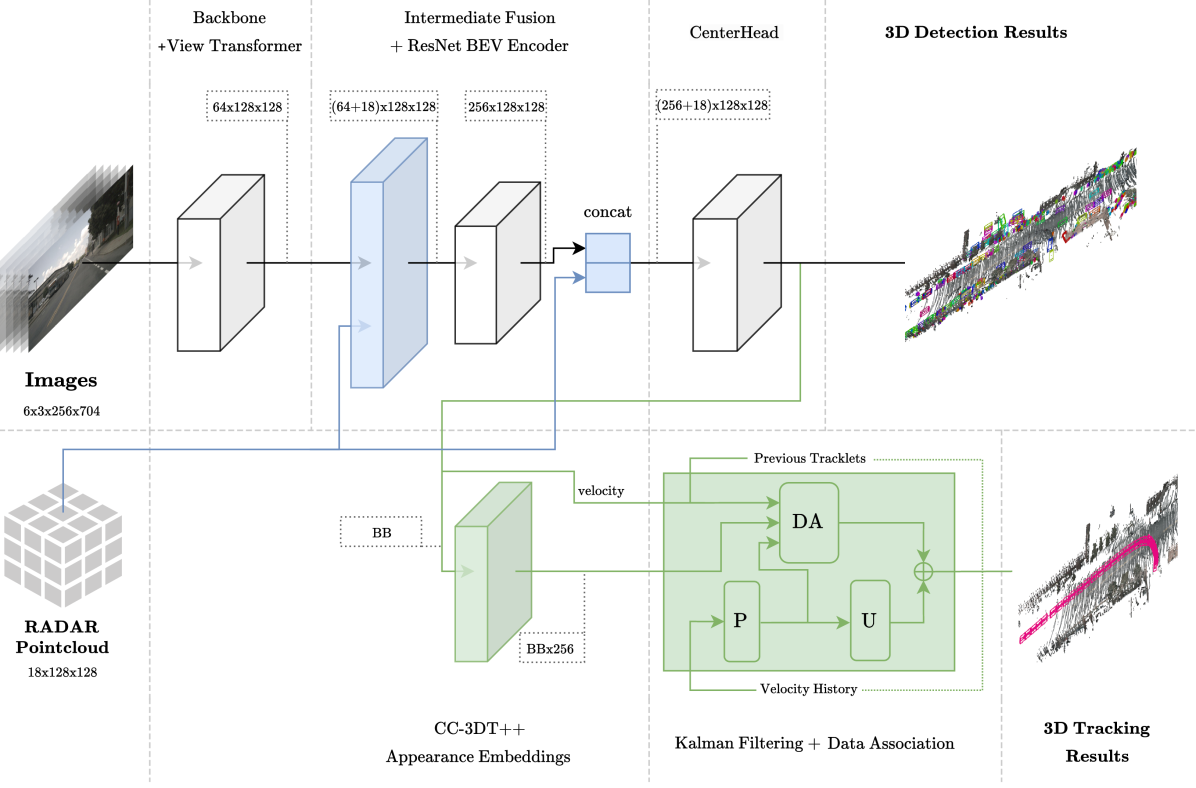
CR3DT: Camera-RADAR Fusion for 3D Detection and Tracking
Nicolas Baumann, Michael Baumgartner, Edoardo Ghignone, Jonas Kuhne, Tobias Fischer, Yung-Hsu Yang, Marc Pollefeys, Michele Magno
To enable self-driving vehicles accurate detection and tracking of surrounding objects is essential. While Light Detection and Ranging (LiDAR) sensors have set the benchmark for high-performance systems, the appeal of camera-only solutions lies in their cost-effectiveness. Notably, despite the prevalent use of Radio Detection and Ranging (RADAR) sensors in automotive systems, their potential in 3D detection and tracking has been largely disregarded due to data sparsity and measurement noise. As a recent development, the combination of RADARs and cameras is emerging as a promising solution. This paper presents Camera-RADAR 3D Detection and Tracking (CR3DT), a camera-RADAR fusion model for 3D object detection, and Multi-Object Tracking (MOT). Building upon the foundations of the State-of-the-Art (SotA) camera-only BEVDet architecture, CR3DT demonstrates substantial improvements in both detection and tracking capabilities, by incorporating the spatial and velocity information of the RADAR sensor. Experimental results demonstrate an absolute improvement in detection performance of 5.3% in mean Average Precision (mAP) and a 14.9% increase in Average Multi-Object Tracking Accuracy (AMOTA) on the nuScenes dataset when leveraging both modalities. CR3DT bridges the gap between high-performance and cost-effective perception systems in autonomous driving, by capitalizing on the ubiquitous presence of RADAR in automotive applications. The code is available at: https://github.com/ETH-PBL/CR3DT.
Read more8/7/2024

0
Sparse Points to Dense Clouds: Enhancing 3D Detection with Limited LiDAR Data
Aakash Kumar, Chen Chen, Ajmal Mian, Neils Lobo, Mubarak Shah
3D detection is a critical task that enables machines to identify and locate objects in three-dimensional space. It has a broad range of applications in several fields, including autonomous driving, robotics and augmented reality. Monocular 3D detection is attractive as it requires only a single camera, however, it lacks the accuracy and robustness required for real world applications. High resolution LiDAR on the other hand, can be expensive and lead to interference problems in heavy traffic given their active transmissions. We propose a balanced approach that combines the advantages of monocular and point cloud-based 3D detection. Our method requires only a small number of 3D points, that can be obtained from a low-cost, low-resolution sensor. Specifically, we use only 512 points, which is just 1% of a full LiDAR frame in the KITTI dataset. Our method reconstructs a complete 3D point cloud from this limited 3D information combined with a single image. The reconstructed 3D point cloud and corresponding image can be used by any multi-modal off-the-shelf detector for 3D object detection. By using the proposed network architecture with an off-the-shelf multi-modal 3D detector, the accuracy of 3D detection improves by 20% compared to the state-of-the-art monocular detection methods and 6% to 9% compare to the baseline multi-modal methods on KITTI and JackRabbot datasets.
Read more4/11/2024