CR3DT: Camera-RADAR Fusion for 3D Detection and Tracking

0
Sign in to get full access
Overview
- The paper proposes a method called CR3DT (Camera-RADAR Fusion for 3D Detection and Tracking) that combines camera and radar data for improved 3D object detection and tracking.
- It addresses the limitations of existing sensor fusion approaches by leveraging the complementary strengths of cameras and radars.
- The proposed system is designed for autonomous driving applications, where accurate 3D perception of the environment is crucial.
Plain English Explanation
The researchers developed a new technique called CR3DT that combines information from cameras and radar sensors to better detect and track 3D objects. Cameras provide detailed visual information, while radar measures the distance and speed of objects. By fusing these two data sources, the system can overcome the weaknesses of using either sensor alone.
For example, cameras can struggle to see through poor weather conditions, while radar is less affected. On the other hand, radar may have trouble distinguishing between different objects, but cameras can provide the visual cues to resolve these ambiguities. By integrating the strengths of both sensors, CR3DT can create a more comprehensive and reliable 3D understanding of the vehicle's surroundings, which is crucial for autonomous driving applications.
Technical Explanation
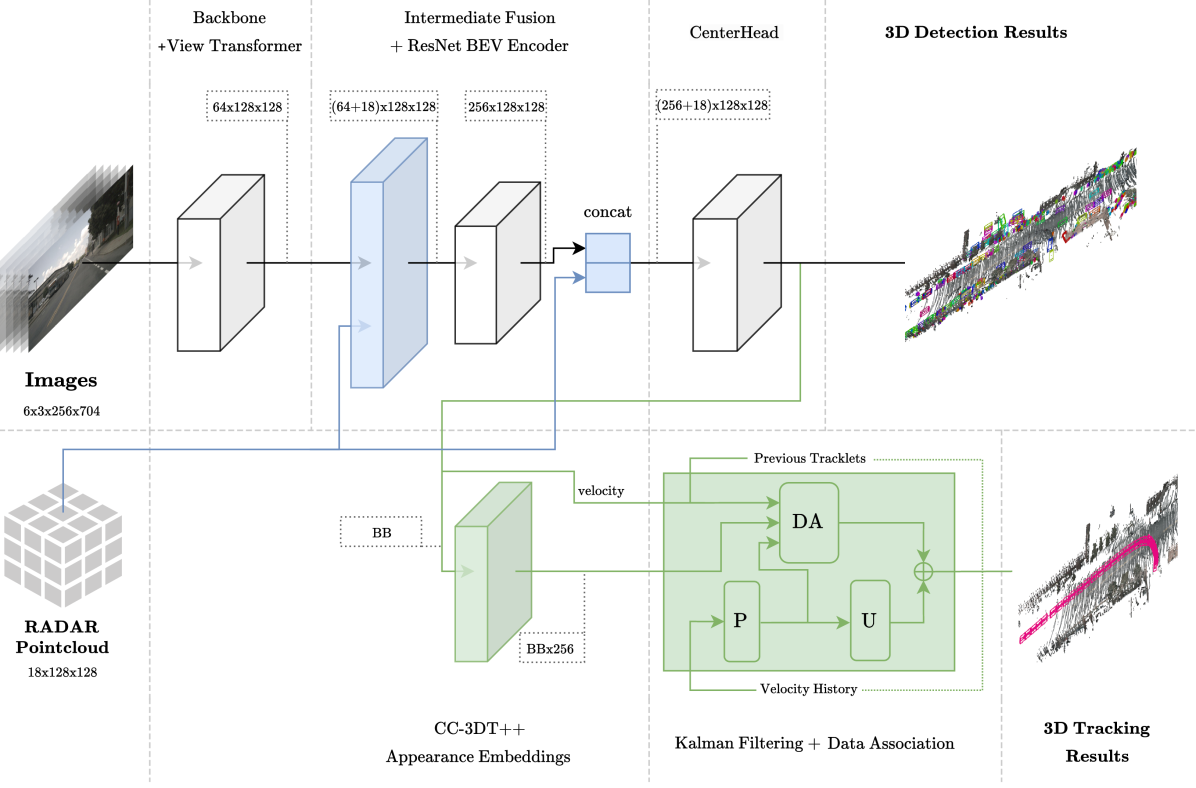
The key innovation of CR3DT is its fusion architecture that combines camera and radar data at multiple levels. First, it uses a neural network to extract features from both sensors independently. Then, it aligns the sensor data in the 3D space and fuses the features using another neural network.
This fusion model is then used for two primary tasks: 3D object detection and 3D object tracking. The detected 3D objects are tracked over time using a Kalman filter-based approach that incorporates both camera and radar measurements.
The researchers evaluated their system on several autonomous driving datasets and found that CR3DT outperformed existing sensor fusion methods in terms of detection and tracking accuracy.
Critical Analysis
The paper provides a thorough evaluation of the CR3DT system and acknowledges some of its limitations. For example, the fusion process relies on accurate sensor calibration, which can be challenging in real-world deployment scenarios. Additionally, the system may struggle with occluded or distant objects, as the radar's range and resolution can be limited.
While the authors demonstrate the advantages of their approach, further research is needed to address these challenges and explore ways to make the system more robust and scalable for large-scale autonomous driving applications.
Conclusion
The CR3DT method represents a promising step forward in multi-sensor fusion for 3D perception in autonomous driving. By effectively combining camera and radar data, the system can create a more comprehensive and reliable understanding of the vehicle's surroundings, which is essential for safe and reliable autonomous navigation. As the field of autonomous driving continues to evolve, techniques like CR3DT will play a crucial role in advancing the state-of-the-art in 3D object detection and tracking.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
CR3DT: Camera-RADAR Fusion for 3D Detection and Tracking
Nicolas Baumann, Michael Baumgartner, Edoardo Ghignone, Jonas Kuhne, Tobias Fischer, Yung-Hsu Yang, Marc Pollefeys, Michele Magno
To enable self-driving vehicles accurate detection and tracking of surrounding objects is essential. While Light Detection and Ranging (LiDAR) sensors have set the benchmark for high-performance systems, the appeal of camera-only solutions lies in their cost-effectiveness. Notably, despite the prevalent use of Radio Detection and Ranging (RADAR) sensors in automotive systems, their potential in 3D detection and tracking has been largely disregarded due to data sparsity and measurement noise. As a recent development, the combination of RADARs and cameras is emerging as a promising solution. This paper presents Camera-RADAR 3D Detection and Tracking (CR3DT), a camera-RADAR fusion model for 3D object detection, and Multi-Object Tracking (MOT). Building upon the foundations of the State-of-the-Art (SotA) camera-only BEVDet architecture, CR3DT demonstrates substantial improvements in both detection and tracking capabilities, by incorporating the spatial and velocity information of the RADAR sensor. Experimental results demonstrate an absolute improvement in detection performance of 5.3% in mean Average Precision (mAP) and a 14.9% increase in Average Multi-Object Tracking Accuracy (AMOTA) on the nuScenes dataset when leveraging both modalities. CR3DT bridges the gap between high-performance and cost-effective perception systems in autonomous driving, by capitalizing on the ubiquitous presence of RADAR in automotive applications. The code is available at: https://github.com/ETH-PBL/CR3DT.
Read more8/7/2024

0
Boosting Online 3D Multi-Object Tracking through Camera-Radar Cross Check
Sheng-Yao Kuan, Jen-Hao Cheng, Hsiang-Wei Huang, Wenhao Chai, Cheng-Yen Yang, Hugo Latapie, Gaowen Liu, Bing-Fei Wu, Jenq-Neng Hwang
In the domain of autonomous driving, the integration of multi-modal perception techniques based on data from diverse sensors has demonstrated substantial progress. Effectively surpassing the capabilities of state-of-the-art single-modality detectors through sensor fusion remains an active challenge. This work leverages the respective advantages of cameras in perspective view and radars in Bird's Eye View (BEV) to greatly enhance overall detection and tracking performance. Our approach, Camera-Radar Associated Fusion Tracking Booster (CRAFTBooster), represents a pioneering effort to enhance radar-camera fusion in the tracking stage, contributing to improved 3D MOT accuracy. The superior experimental results on the K-Radaar dataset, which exhibit 5-6% on IDF1 tracking performance gain, validate the potential of effective sensor fusion in advancing autonomous driving.
Read more7/22/2024
🔎
0
LEROjD: Lidar Extended Radar-Only Object Detection
Patrick Palmer, Martin Kruger, Stefan Schutte, Richard Altendorfer, Ganesh Adam, Torsten Bertram
Accurate 3D object detection is vital for automated driving. While lidar sensors are well suited for this task, they are expensive and have limitations in adverse weather conditions. 3+1D imaging radar sensors offer a cost-effective, robust alternative but face challenges due to their low resolution and high measurement noise. Existing 3+1D imaging radar datasets include radar and lidar data, enabling cross-modal model improvements. Although lidar should not be used during inference, it can aid the training of radar-only object detectors. We explore two strategies to transfer knowledge from the lidar to the radar domain and radar-only object detectors: 1. multi-stage training with sequential lidar point cloud thin-out, and 2. cross-modal knowledge distillation. In the multi-stage process, three thin-out methods are examined. Our results show significant performance gains of up to 4.2 percentage points in mean Average Precision with multi-stage training and up to 3.9 percentage points with knowledge distillation by initializing the student with the teacher's weights. The main benefit of these approaches is their applicability to other 3D object detection networks without altering their architecture, as we show by analyzing it on two different object detectors. Our code is available at https://github.com/rst-tu-dortmund/lerojd
Read more9/10/2024
🔎
0
Multi-Object Tracking based on Imaging Radar 3D Object Detection
Patrick Palmer, Martin Kruger, Richard Altendorfer, Torsten Bertram
Effective tracking of surrounding traffic participants allows for an accurate state estimation as a necessary ingredient for prediction of future behavior and therefore adequate planning of the ego vehicle trajectory. One approach for detecting and tracking surrounding traffic participants is the combination of a learning based object detector with a classical tracking algorithm. Learning based object detectors have been shown to work adequately on lidar and camera data, while learning based object detectors using standard radar data input have proven to be inferior. Recently, with the improvements to radar sensor technology in the form of imaging radars, the object detection performance on radar was greatly improved but is still limited compared to lidar sensors due to the sparsity of the radar point cloud. This presents a unique challenge for the task of multi-object tracking. The tracking algorithm must overcome the limited detection quality while generating consistent tracks. To this end, a comparison between different multi-object tracking methods on imaging radar data is required to investigate its potential for downstream tasks. The work at hand compares multiple approaches and analyzes their limitations when applied to imaging radar data. Furthermore, enhancements to the presented approaches in the form of probabilistic association algorithms are considered for this task.
Read more6/4/2024