LMMCoDrive: Cooperative Driving with Large Multimodal Model

0

Sign in to get full access
Overview
- The research paper proposes a cooperative driving system called LMMCoDrive that leverages a large multimodal model to enable autonomous vehicles to coordinate and collaborate.
- The system aims to improve safety and efficiency in autonomous driving by allowing vehicles to perceive their environment, understand the intentions of other vehicles, and coordinate their actions.
- The paper presents the technical details of the LMMCoDrive architecture and evaluates its performance in simulated driving scenarios.
Plain English Explanation
The paper introduces a new approach to autonomous driving called LMMCoDrive. The key idea is to use a large, powerful artificial intelligence (AI) model that can perceive and understand the driving environment from multiple sensors (like cameras, radar, etc.). This allows the vehicles to not just see the road and other cars, but also understand what's happening and anticipate the actions of other drivers.
By having this deeper understanding, the autonomous vehicles can coordinate and collaborate with each other to drive more safely and efficiently. For example, if one car knows that another car is planning to change lanes, they can work together to make the lane change smooth and safe.
This coordination and collaboration is an important advancement, as current autonomous driving systems tend to operate independently without much awareness of the other vehicles around them. LMMCoDrive aims to change that by giving the cars a more holistic, cooperative view of the driving situation.
The paper provides technical details on how this cooperative driving system is designed and implemented, using a large multimodal AI model that can process data from various sensors. The researchers then test the system in simulated driving scenarios to evaluate its performance and benefits compared to more traditional autonomous driving approaches.
Technical Explanation
The LMMCoDrive system is built around a large multimodal model that can perceive and reason about the driving environment using data from various sensors, including cameras, radar, and lidar. This model is trained on a vast amount of driving data to develop a deep understanding of driving dynamics, traffic patterns, and the intentions of other drivers.
At the core of the system is a coordination module that allows the autonomous vehicles to share their observations, predictions, and planned actions with each other. This enables the vehicles to coordinate their behaviors in real-time, making decisions that optimize for overall safety and efficiency rather than just focusing on their individual driving tasks.
The paper describes the architecture of the LMMCoDrive system, which includes modules for perception, prediction, planning, and coordination. The perception module uses the large multimodal model to extract relevant information from sensor data, while the prediction module leverages this understanding to forecast the future behavior of other vehicles.
The planning module then generates optimal driving trajectories for the autonomous vehicle, taking into account the predicted actions of surrounding vehicles. Finally, the coordination module facilitates the exchange of information and the synchronization of driving plans between the cooperating vehicles.
The researchers evaluate the performance of LMMCoDrive in simulated driving scenarios, comparing it to more traditional autonomous driving approaches. The results demonstrate that the cooperative nature of the system leads to improved safety metrics, such as reduced collision rates, as well as enhanced efficiency, with smoother traffic flow and reduced travel times.
Critical Analysis
The paper presents a compelling vision for the future of autonomous driving, where vehicles can work together to navigate the roads more safely and efficiently. The LMMCoDrive approach, with its emphasis on cooperative decision-making and coordination, represents a significant advancement over current autonomous driving systems that tend to operate in isolation.
However, the paper does acknowledge several limitations and areas for further research. For instance, the evaluation is conducted in simulated environments, and the researchers note the need to validate the system's performance in real-world driving conditions. Additionally, the paper does not address the complex legal and regulatory challenges that may arise when deploying such a cooperative driving system at scale.
Another potential concern is the reliance on a large, complex AI model, which may raise questions about transparency and accountability. If the autonomous vehicles are making critical decisions based on the outputs of a "black box" model, it could be challenging to understand and validate the reasoning behind those decisions, especially in the context of safety-critical driving scenarios.
Further research may be needed to address these challenges and ensure that cooperative driving systems like LMMCoDrive can be deployed in a safe, reliable, and transparent manner. Nonetheless, the paper represents an important step forward in the ongoing quest to develop more advanced and sophisticated autonomous driving capabilities.
Conclusion
The LMMCoDrive paper presents a novel approach to autonomous driving that emphasizes cooperation and coordination between vehicles, enabled by a large multimodal AI model. This system has the potential to significantly improve the safety and efficiency of autonomous driving by allowing vehicles to perceive their environment more holistically, understand the intentions of other drivers, and make coordinated decisions.
While the paper highlights the promising performance of LMMCoDrive in simulated scenarios, it also acknowledges the need for further research and validation in real-world conditions. Additionally, the reliance on complex AI models raises questions about transparency and accountability that will need to be addressed as the technology matures.
Nonetheless, the cooperative driving paradigm introduced in this paper represents an important step forward in the development of more advanced and capable autonomous driving systems. As the field continues to evolve, solutions like LMMCoDrive may play a crucial role in shaping the future of transportation and mobility.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
LMMCoDrive: Cooperative Driving with Large Multimodal Model
Haichao Liu, Ruoyu Yao, Zhenmin Huang, Shaojie Shen, Jun Ma
To address the intricate challenges of decentralized cooperative scheduling and motion planning in Autonomous Mobility-on-Demand (AMoD) systems, this paper introduces LMMCoDrive, a novel cooperative driving framework that leverages a Large Multimodal Model (LMM) to enhance traffic efficiency in dynamic urban environments. This framework seamlessly integrates scheduling and motion planning processes to ensure the effective operation of Cooperative Autonomous Vehicles (CAVs). The spatial relationship between CAVs and passenger requests is abstracted into a Bird's-Eye View (BEV) to fully exploit the potential of the LMM. Besides, trajectories are cautiously refined for each CAV while ensuring collision avoidance through safety constraints. A decentralized optimization strategy, facilitated by the Alternating Direction Method of Multipliers (ADMM) within the LMM framework, is proposed to drive the graph evolution of CAVs. Simulation results demonstrate the pivotal role and significant impact of LMM in optimizing CAV scheduling and enhancing decentralized cooperative optimization process for each vehicle. This marks a substantial stride towards achieving practical, efficient, and safe AMoD systems that are poised to revolutionize urban transportation. The code is available at https://github.com/henryhcliu/LMMCoDrive.
Read more9/19/2024
0
Towards Interactive and Learnable Cooperative Driving Automation: a Large Language Model-Driven Decision-Making Framework
Shiyu Fang, Jiaqi Liu, Mingyu Ding, Yiming Cui, Chen Lv, Peng Hang, Jian Sun
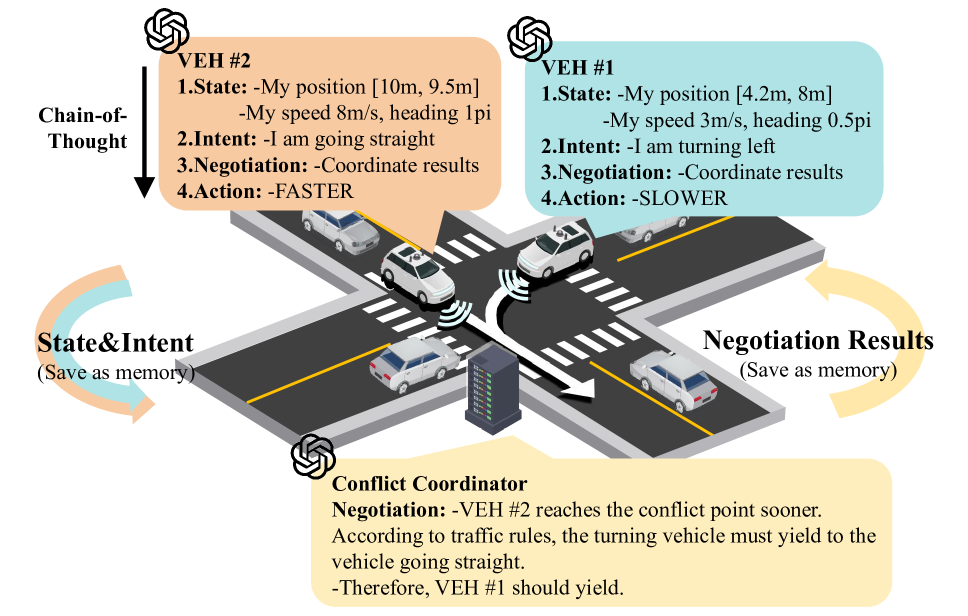
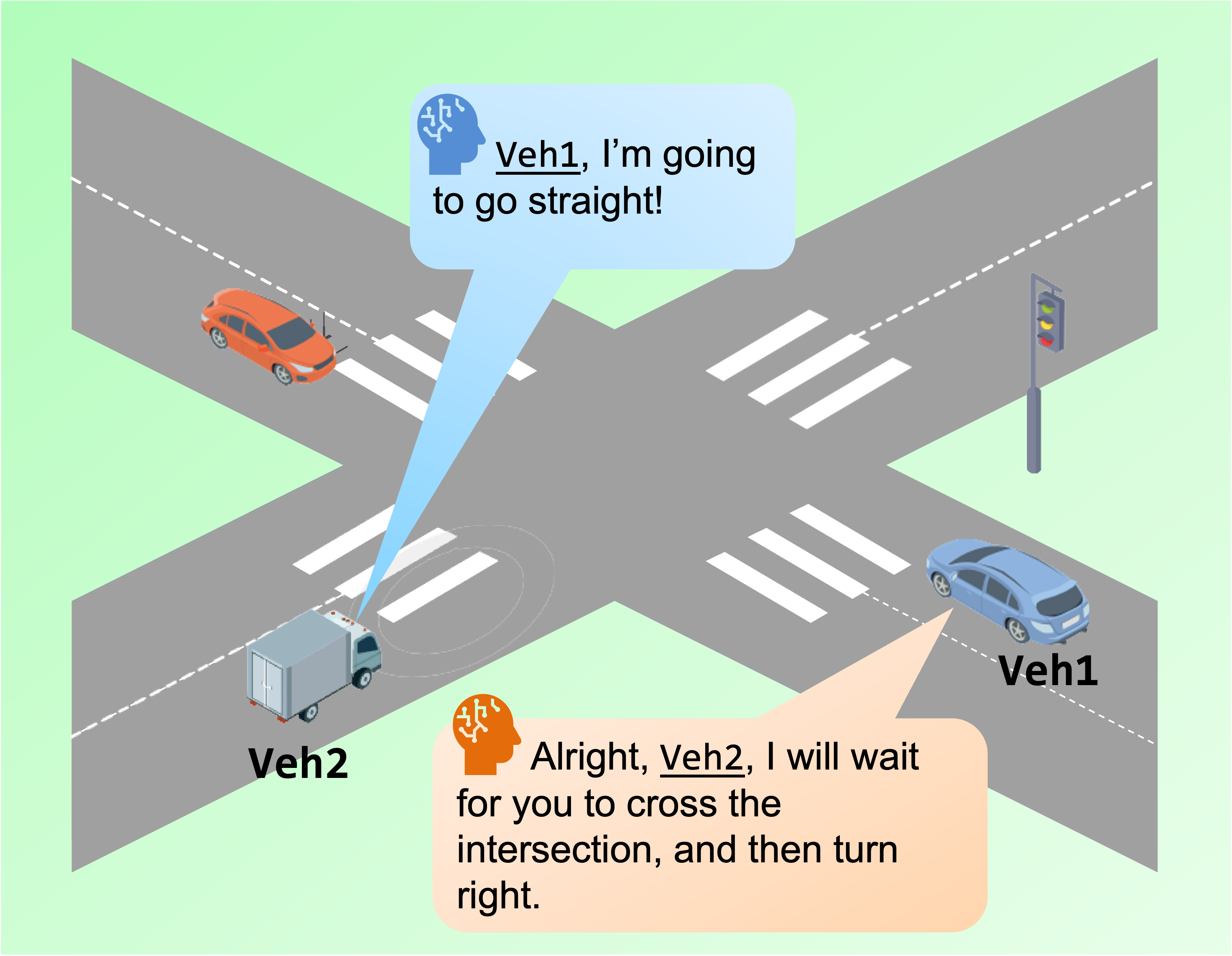
At present, Connected Autonomous Vehicles (CAVs) have begun to open road testing around the world, but their safety and efficiency performance in complex scenarios is still not satisfactory. Cooperative driving leverages the connectivity ability of CAVs to achieve synergies greater than the sum of their parts, making it a promising approach to improving CAV performance in complex scenarios. However, the lack of interaction and continuous learning ability limits current cooperative driving to single-scenario applications and specific Cooperative Driving Automation (CDA). To address these challenges, this paper proposes CoDrivingLLM, an interactive and learnable LLM-driven cooperative driving framework, to achieve all-scenario and all-CDA. First, since Large Language Models(LLMs) are not adept at handling mathematical calculations, an environment module is introduced to update vehicle positions based on semantic decisions, thus avoiding potential errors from direct LLM control of vehicle positions. Second, based on the four levels of CDA defined by the SAE J3216 standard, we propose a Chain-of-Thought (COT) based reasoning module that includes state perception, intent sharing, negotiation, and decision-making, enhancing the stability of LLMs in multi-step reasoning tasks. Centralized conflict resolution is then managed through a conflict coordinator in the reasoning process. Finally, by introducing a memory module and employing retrieval-augmented generation, CAVs are endowed with the ability to learn from their past experiences. We validate the proposed CoDrivingLLM through ablation experiments on the negotiation module, reasoning with different shots experience, and comparison with other cooperative driving methods.
Read more9/24/2024
0
AgentsCoDriver: Large Language Model Empowered Collaborative Driving with Lifelong Learning
Senkang Hu, Zhengru Fang, Zihan Fang, Yiqin Deng, Xianhao Chen, Yuguang Fang
Connected and autonomous driving is developing rapidly in recent years. However, current autonomous driving systems, which are primarily based on data-driven approaches, exhibit deficiencies in interpretability, generalization, and continuing learning capabilities. In addition, the single-vehicle autonomous driving systems lack of the ability of collaboration and negotiation with other vehicles, which is crucial for the safety and efficiency of autonomous driving systems. In order to address these issues, we leverage large language models (LLMs) to develop a novel framework, AgentsCoDriver, to enable multiple vehicles to conduct collaborative driving. AgentsCoDriver consists of five modules: observation module, reasoning engine, cognitive memory module, reinforcement reflection module, and communication module. It can accumulate knowledge, lessons, and experiences over time by continuously interacting with the environment, thereby making itself capable of lifelong learning. In addition, by leveraging the communication module, different agents can exchange information and realize negotiation and collaboration in complex traffic environments. Extensive experiments are conducted and show the superiority of AgentsCoDriver.
Read more4/23/2024
0
A Superalignment Framework in Autonomous Driving with Large Language Models
Xiangrui Kong, Thomas Braunl, Marco Fahmi, Yue Wang
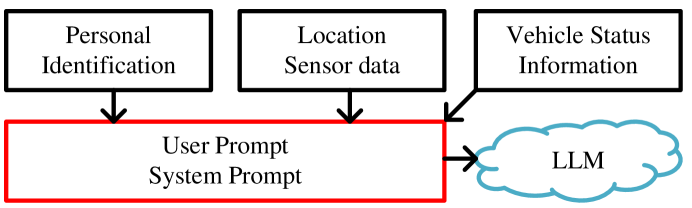
Over the last year, significant advancements have been made in the realms of large language models (LLMs) and multi-modal large language models (MLLMs), particularly in their application to autonomous driving. These models have showcased remarkable abilities in processing and interacting with complex information. In autonomous driving, LLMs and MLLMs are extensively used, requiring access to sensitive vehicle data such as precise locations, images, and road conditions. These data are transmitted to an LLM-based inference cloud for advanced analysis. However, concerns arise regarding data security, as the protection against data and privacy breaches primarily depends on the LLM's inherent security measures, without additional scrutiny or evaluation of the LLM's inference outputs. Despite its importance, the security aspect of LLMs in autonomous driving remains underexplored. Addressing this gap, our research introduces a novel security framework for autonomous vehicles, utilizing a multi-agent LLM approach. This framework is designed to safeguard sensitive information associated with autonomous vehicles from potential leaks, while also ensuring that LLM outputs adhere to driving regulations and align with human values. It includes mechanisms to filter out irrelevant queries and verify the safety and reliability of LLM outputs. Utilizing this framework, we evaluated the security, privacy, and cost aspects of eleven large language model-driven autonomous driving cues. Additionally, we performed QA tests on these driving prompts, which successfully demonstrated the framework's efficacy.
Read more6/11/2024