Long and Short-Term Constraints Driven Safe Reinforcement Learning for Autonomous Driving

0
Sign in to get full access
Overview
- Explores a safe reinforcement learning approach for autonomous driving that balances long-term and short-term constraints
- Proposes a dual-constraint optimization framework using Lagrange multipliers to handle conflicting objectives
- Demonstrates the effectiveness of the approach through simulated driving tasks
Plain English Explanation
This paper presents a new method for training autonomous driving systems using reinforcement learning, with a focus on ensuring safe and reliable behavior. The key challenge is that autonomous driving requires balancing multiple, sometimes conflicting objectives - for example, reaching the destination efficiently while also avoiding collisions and obeying traffic laws.
The researchers' approach uses a "dual-constraint optimization" framework. This means they define both long-term constraints (like reaching the destination) and short-term constraints (like avoiding immediate collisions). They then use a mathematical technique called Lagrange multipliers to find the optimal balance between these different goals.
The intuition is that the autonomous driving agent needs to reason not just about its current actions, but also about the long-term consequences of those actions. By incorporating both short-term and long-term constraints, the system can learn to make safer and more reliable decisions, even in complex or uncertain driving scenarios.
The paper demonstrates the effectiveness of this approach through simulated driving tasks, showing that it can outperform standard reinforcement learning methods in terms of safety and performance. This suggests that the dual-constraint optimization framework could be a promising direction for making autonomous driving systems more robust and trustworthy.
Technical Explanation
The paper proposes a safe reinforcement learning approach for autonomous driving that balances long-term and short-term constraints. The authors define a dual-constraint optimization problem, where the agent must optimize for both long-term goals (like reaching the destination) and short-term safety constraints (like avoiding collisions).
To solve this optimization problem, the researchers use Lagrange multipliers, a mathematical technique that allows them to handle the conflicting objectives. The Lagrange multipliers act as "trade-off" parameters, enabling the agent to find the optimal balance between the long-term and short-term constraints.
The paper evaluates the proposed approach through extensive simulations of autonomous driving tasks. The results show that the dual-constraint optimization framework outperforms standard deep reinforcement learning methods in terms of safety and performance metrics. This suggests that the long-term and short-term constraint balancing is a key factor in enabling safe and reliable autonomous driving.
Critical Analysis
The paper presents a thoughtful and well-designed approach to the challenge of safe reinforcement learning for autonomous driving. The use of dual-constraint optimization and Lagrange multipliers is a principled way to handle the conflicting objectives inherent in this problem.
One potential limitation of the approach is that it relies on accurate modeling of the long-term and short-term constraints. In real-world driving scenarios, these constraints may be difficult to define precisely or may change dynamically. Further research would be needed to understand how robust the method is to such uncertainties.
Additionally, the paper focuses on simulated environments, which may not fully capture the complexity and unpredictability of real-world driving. Validating the approach on physical autonomous vehicles would be an important next step to assess its practical applicability and safety.
Overall, the paper makes a valuable contribution to the field of safe reinforcement learning for autonomous systems. The dual-constraint optimization framework and use of Lagrange multipliers represent an innovative and promising direction for ensuring the safety and reliability of autonomous driving technologies.
Conclusion
This paper presents a novel safe reinforcement learning approach for autonomous driving that balances long-term and short-term constraints. By formulating the problem as a dual-constraint optimization and using Lagrange multipliers, the researchers demonstrate how an autonomous agent can learn to make decisions that optimize for both high-level goals and immediate safety considerations.
The simulated results show that this approach can outperform standard reinforcement learning methods, suggesting that the careful management of conflicting objectives is a key factor in enabling safe and reliable autonomous driving. While further research is needed to address real-world complexities, this work represents an important step forward in the development of trustworthy autonomous systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Long and Short-Term Constraints Driven Safe Reinforcement Learning for Autonomous Driving
Xuemin Hu, Pan Chen, Yijun Wen, Bo Tang, Long Chen
Reinforcement learning (RL) has been widely used in decision-making and control tasks, but the risk is very high for the agent in the training process due to the requirements of interaction with the environment, which seriously limits its industrial applications such as autonomous driving systems. Safe RL methods are developed to handle this issue by constraining the expected safety violation costs as a training objective, but the occurring probability of an unsafe state is still high, which is unacceptable in autonomous driving tasks. Moreover, these methods are difficult to achieve a balance between the cost and return expectations, which leads to learning performance degradation for the algorithms. In this paper, we propose a novel algorithm based on the long and short-term constraints (LSTC) for safe RL. The short-term constraint aims to enhance the short-term state safety that the vehicle explores, while the long-term constraint enhances the overall safety of the vehicle throughout the decision-making process, both of which are jointly used to enhance the vehicle safety in the training process. In addition, we develop a safe RL method with dual-constraint optimization based on the Lagrange multiplier to optimize the training process for end-to-end autonomous driving. Comprehensive experiments were conducted on the MetaDrive simulator. Experimental results demonstrate that the proposed method achieves higher safety in continuous state and action tasks, and exhibits higher exploration performance in long-distance decision-making tasks compared with state-of-the-art methods.
Read more9/14/2024
0
Deep Reinforcement Learning for Advanced Longitudinal Control and Collision Avoidance in High-Risk Driving Scenarios
Dianwei Chen, Yaobang Gong, Xianfeng Yang
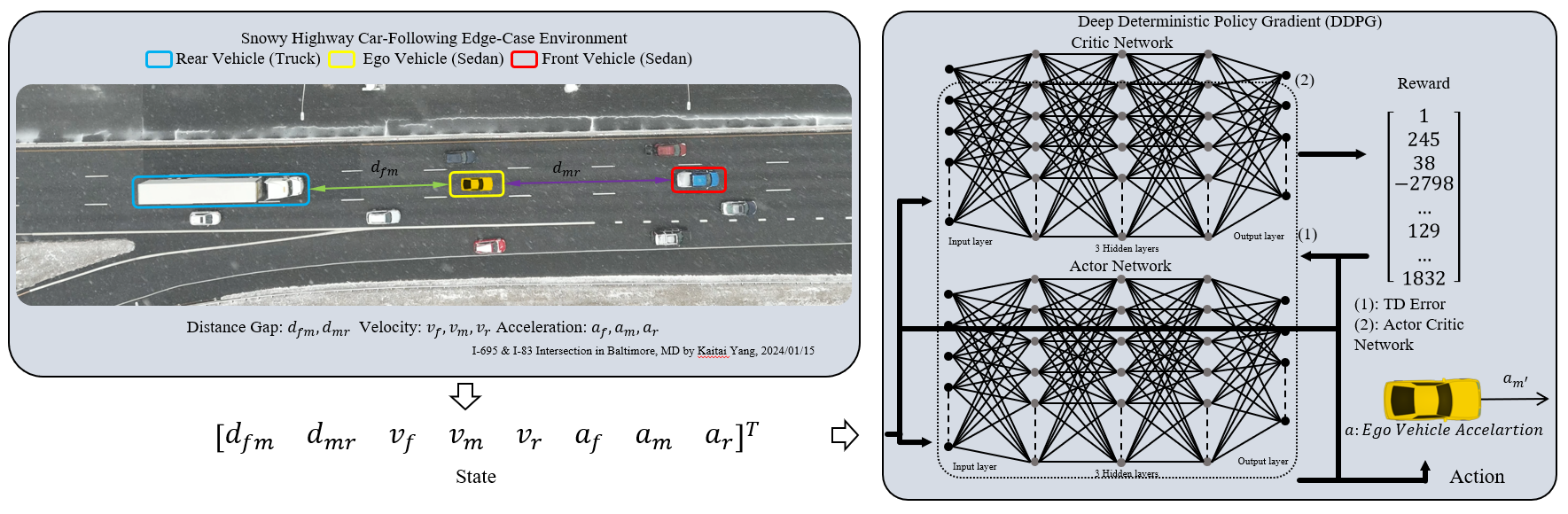
Existing Advanced Driver Assistance Systems primarily focus on the vehicle directly ahead, often overlooking potential risks from following vehicles. This oversight can lead to ineffective handling of high risk situations, such as high speed, closely spaced, multi vehicle scenarios where emergency braking by one vehicle might trigger a pile up collision. To overcome these limitations, this study introduces a novel deep reinforcement learning based algorithm for longitudinal control and collision avoidance. This proposed algorithm effectively considers the behavior of both leading and following vehicles. Its implementation in simulated high risk scenarios, which involve emergency braking in dense traffic where traditional systems typically fail, has demonstrated the algorithm ability to prevent potential pile up collisions, including those involving heavy duty vehicles.
Read more5/1/2024
0
Safe Reinforcement Learning with Learned Non-Markovian Safety Constraints
Siow Meng Low, Akshat Kumar
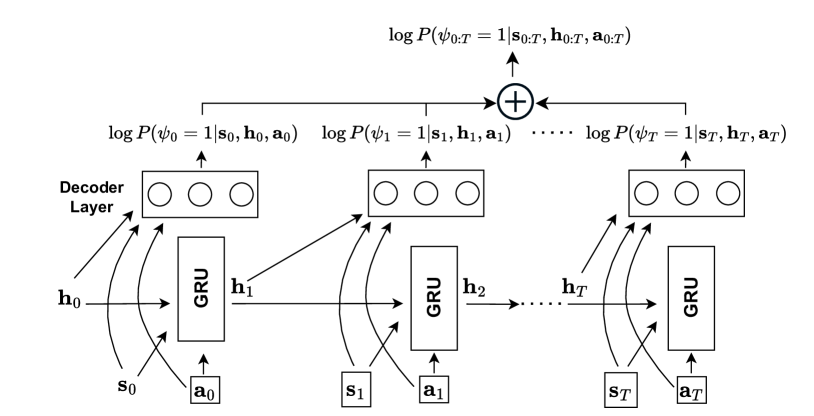
In safe Reinforcement Learning (RL), safety cost is typically defined as a function dependent on the immediate state and actions. In practice, safety constraints can often be non-Markovian due to the insufficient fidelity of state representation, and safety cost may not be known. We therefore address a general setting where safety labels (e.g., safe or unsafe) are associated with state-action trajectories. Our key contributions are: first, we design a safety model that specifically performs credit assignment to assess contributions of partial state-action trajectories on safety. This safety model is trained using a labeled safety dataset. Second, using RL-as-inference strategy we derive an effective algorithm for optimizing a safe policy using the learned safety model. Finally, we devise a method to dynamically adapt the tradeoff coefficient between reward maximization and safety compliance. We rewrite the constrained optimization problem into its dual problem and derive a gradient-based method to dynamically adjust the tradeoff coefficient during training. Our empirical results demonstrate that this approach is highly scalable and able to satisfy sophisticated non-Markovian safety constraints.
Read more5/7/2024
0
Safe Reinforcement Learning on the Constraint Manifold: Theory and Applications
Puze Liu, Haitham Bou-Ammar, Jan Peters, Davide Tateo
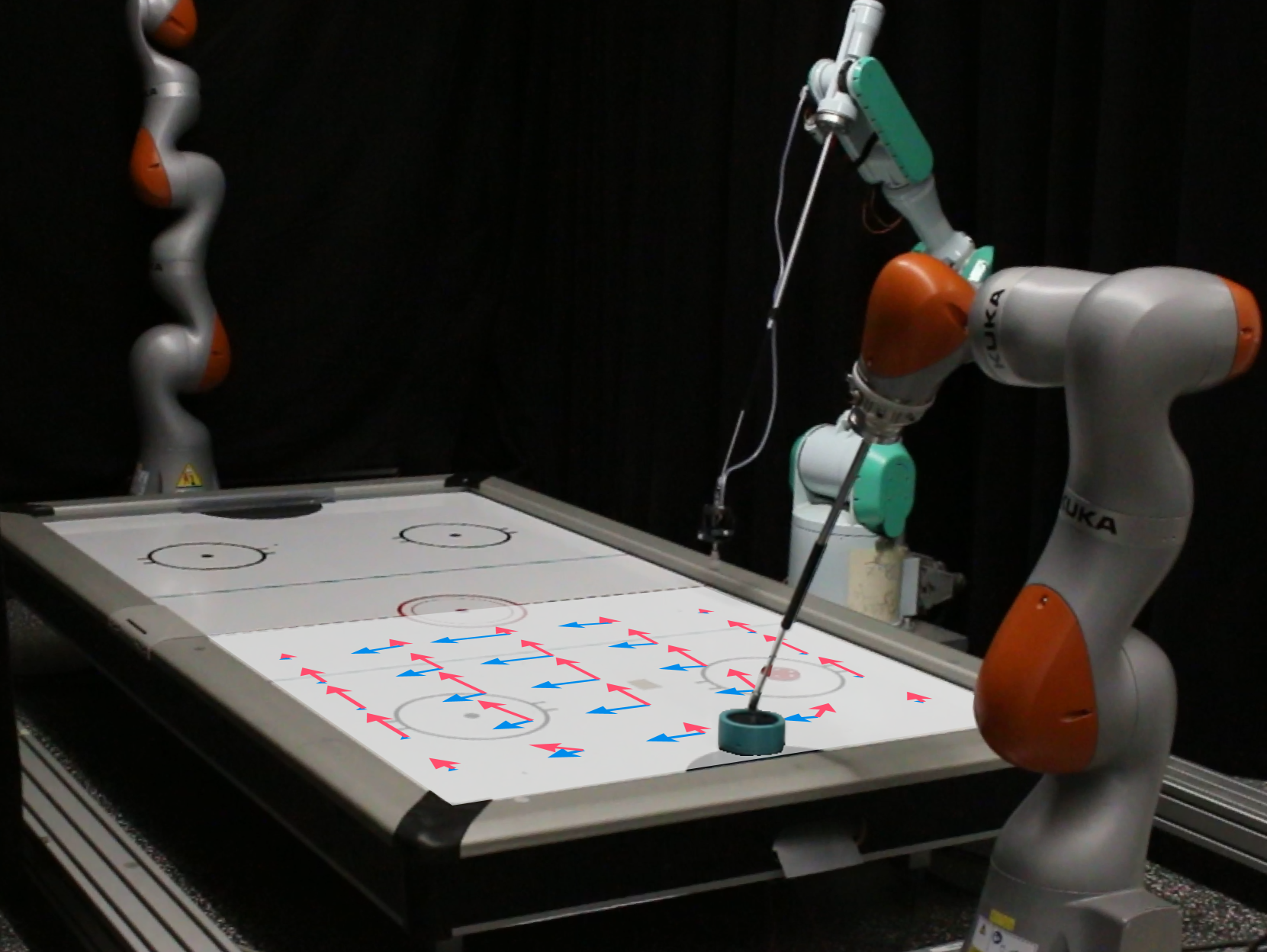
Integrating learning-based techniques, especially reinforcement learning, into robotics is promising for solving complex problems in unstructured environments. However, most existing approaches are trained in well-tuned simulators and subsequently deployed on real robots without online fine-tuning. In this setting, the simulation's realism seriously impacts the deployment's success rate. Instead, learning with real-world interaction data offers a promising alternative: not only eliminates the need for a fine-tuned simulator but also applies to a broader range of tasks where accurate modeling is unfeasible. One major problem for on-robot reinforcement learning is ensuring safety, as uncontrolled exploration can cause catastrophic damage to the robot or the environment. Indeed, safety specifications, often represented as constraints, can be complex and non-linear, making safety challenging to guarantee in learning systems. In this paper, we show how we can impose complex safety constraints on learning-based robotics systems in a principled manner, both from theoretical and practical points of view. Our approach is based on the concept of the Constraint Manifold, representing the set of safe robot configurations. Exploiting differential geometry techniques, i.e., the tangent space, we can construct a safe action space, allowing learning agents to sample arbitrary actions while ensuring safety. We demonstrate the method's effectiveness in a real-world Robot Air Hockey task, showing that our method can handle high-dimensional tasks with complex constraints. Videos of the real robot experiments are available on the project website (https://puzeliu.github.io/TRO-ATACOM).
Read more4/16/2024