Low Latency Instance Segmentation by Continuous Clustering for LiDAR Sensors

0

Sign in to get full access
Overview
- This research paper presents a low-latency instance segmentation method for rotating LiDAR sensors.
- The key idea is to perform continuous clustering of LiDAR point clouds to enable fast and accurate instance segmentation.
- The method is designed to work efficiently with the unique characteristics of rotating LiDAR sensors, which generate data in a continuous stream.
Plain English Explanation
The paper introduces a new approach for quickly identifying and separating individual objects (like cars, pedestrians, or buildings) in data collected by rotating LiDAR sensors. LiDAR sensors use laser beams to measure the distance to objects, and they are often used in self-driving cars and robotics.
Unlike traditional techniques that process the entire LiDAR scan at once, this method works by continuously clustering the incoming point cloud data. This allows it to detect and track objects as they move through the sensor's field of view, without having to wait for the full scan to be completed.
The key innovation is the use of a "continuous clustering" algorithm that can group points into distinct objects in real-time, rather than after the fact. This enables very fast instance segmentation - the ability to identify and separate individual objects - which is crucial for applications like autonomous navigation that require rapid decision-making.
By tailoring the approach to the unique characteristics of rotating LiDAR sensors, the researchers were able to achieve high accuracy and low latency, making the system suitable for time-critical robotics and self-driving tasks.
Technical Explanation
The paper introduces a novel method for instance segmentation of LiDAR point clouds in a rotating sensor setup. Unlike traditional approaches that process the entire scan at once, the proposed technique performs continuous clustering of the incoming data stream.
The core idea is to leverage the inherent temporal and spatial coherence of the rotating LiDAR sensor's data. As the sensor rotates, the same objects will appear in consecutive scans, allowing the algorithm to track them over time and segment them into distinct instances.
The method starts by generating a range image from the incoming LiDAR points. It then performs a continuous clustering operation to group the points into distinct object instances, leveraging both spatial and temporal cues.
This continuous clustering approach enables fast and accurate instance segmentation, as objects can be detected and tracked as they move through the sensor's field of view. The authors demonstrate that their method outperforms traditional batch-processing techniques in terms of latency and accuracy, making it well-suited for time-critical robotics and autonomous navigation applications.
Critical Analysis
The paper presents a compelling approach to the challenge of fast and accurate instance segmentation for rotating LiDAR sensors. The continuous clustering technique is a clever way to leverage the inherent temporal and spatial coherence of the sensor data, allowing for real-time object detection and tracking.
One potential limitation is that the method may struggle with dynamic scenes where objects appear and disappear rapidly, as the continuous clustering approach relies on being able to track objects over time. Additionally, the performance of the method may degrade in cluttered environments with many overlapping objects.
The authors acknowledge these challenges and suggest potential directions for future research, such as incorporating additional sensor modalities (e.g., camera data) or exploring more advanced clustering algorithms. Further investigation into the robustness of the approach in complex real-world scenarios would also be valuable.
Overall, the paper presents an innovative and promising solution for low-latency instance segmentation, which could have significant implications for a range of robotics and autonomous systems applications.
Conclusion
This research paper introduces a novel approach for fast and accurate instance segmentation of LiDAR point clouds in a rotating sensor setup. By continuously clustering the incoming data stream, the method can detect and track objects as they move through the sensor's field of view, enabling low-latency instance segmentation.
The key innovation is the use of a continuous clustering algorithm that leverages both spatial and temporal cues, allowing the system to operate efficiently with the unique characteristics of rotating LiDAR sensors. The authors demonstrate that their method outperforms traditional batch-processing techniques, making it well-suited for time-critical applications such as autonomous navigation and robotics.
While the approach has some potential limitations, the paper presents a compelling solution to an important problem in the field of computer vision and scene understanding. The continuous clustering technique could have broader applications beyond just rotating LiDAR sensors, and the insights from this research may inspire further advancements in the field.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Low Latency Instance Segmentation by Continuous Clustering for LiDAR Sensors
Andreas Reich, Mirko Maehlisch
Low-latency instance segmentation of LiDAR point clouds is crucial in real-world applications because it serves as an initial and frequently-used building block in a robot's perception pipeline, where every task adds further delay. Particularly in dynamic environments, this total delay can result in significant positional offsets of dynamic objects, as seen in highway scenarios. To address this issue, we employ a new technique, which we call continuous clustering. Unlike most existing clustering approaches, which use a full revolution of the LiDAR sensor, we process the data stream in a continuous and seamless fashion. Our approach does not rely on the concept of complete or partial sensor rotations with multiple discrete range images; instead, it views the range image as a single and infinitely horizontally growing entity. Each new column of this continuous range image is processed as soon it is available. Obstacle points are clustered to existing instances in real-time and it is checked at a high-frequency which instances are completed in order to publish them without waiting for the completion of the revolution or some other integration period. In the case of rotating sensors, no problematic discontinuities between the points of the end and the start of a scan are observed. In this work we describe the two-layered data structure and the corresponding algorithm for continuous clustering. It is able to achieve an average latency of just 5 ms with respect to the latest timestamp of all points in the cluster. We are publishing the source code at https://github.com/UniBwTAS/continuous_clustering.
Read more7/26/2024

0
A Preprocessing and Postprocessing Voxel-based Method for LiDAR Semantic Segmentation Improvement in Long Distance
Andrea Matteazzi, Pascal Colling, Michael Arnold, Dietmar Tutsch
In recent years considerable research in LiDAR semantic segmentation was conducted, introducing several new state of the art models. However, most research focuses on single-scan point clouds, limiting performance especially in long distance outdoor scenarios, by omitting time-sequential information. Moreover, varying-density and occlusions constitute significant challenges in single-scan approaches. In this paper we propose a LiDAR point cloud preprocessing and postprocessing method. This multi-stage approach, in conjunction with state of the art models in a multi-scan setting, aims to solve those challenges. We demonstrate the benefits of our method through quantitative evaluation with the given models in single-scan settings. In particular, we achieve significant improvements in mIoU performance of over 5 percentage point in medium range and over 10 percentage point in far range. This is essential for 3D semantic scene understanding in long distance as well as for applications where offline processing is permissible.
Read more5/17/2024
0
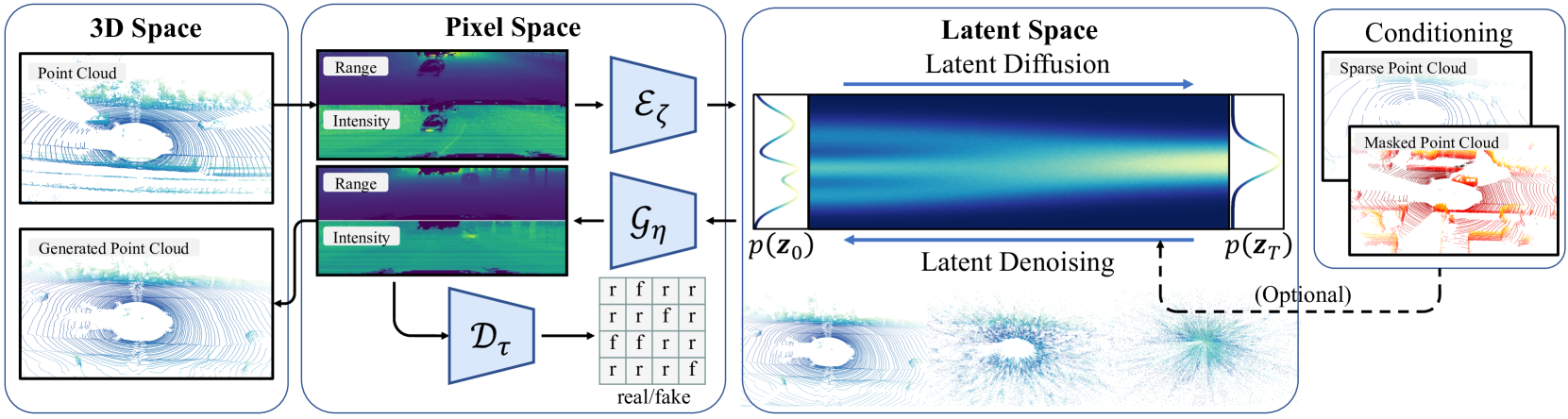
RangeLDM: Fast Realistic LiDAR Point Cloud Generation
Qianjiang Hu, Zhimin Zhang, Wei Hu
Autonomous driving demands high-quality LiDAR data, yet the cost of physical LiDAR sensors presents a significant scaling-up challenge. While recent efforts have explored deep generative models to address this issue, they often consume substantial computational resources with slow generation speeds while suffering from a lack of realism. To address these limitations, we introduce RangeLDM, a novel approach for rapidly generating high-quality range-view LiDAR point clouds via latent diffusion models. We achieve this by correcting range-view data distribution for accurate projection from point clouds to range images via Hough voting, which has a critical impact on generative learning. We then compress the range images into a latent space with a variational autoencoder, and leverage a diffusion model to enhance expressivity. Additionally, we instruct the model to preserve 3D structural fidelity by devising a range-guided discriminator. Experimental results on KITTI-360 and nuScenes datasets demonstrate both the robust expressiveness and fast speed of our LiDAR point cloud generation.
Read more9/11/2024
0
UNIT: Unsupervised Online Instance Segmentation through Time
Corentin Sautier, Gilles Puy, Alexandre Boulch, Renaud Marlet, Vincent Lepetit
Online object segmentation and tracking in Lidar point clouds enables autonomous agents to understand their surroundings and make safe decisions. Unfortunately, manual annotations for these tasks are prohibitively costly. We tackle this problem with the task of class-agnostic unsupervised online instance segmentation and tracking. To that end, we leverage an instance segmentation backbone and propose a new training recipe that enables the online tracking of objects. Our network is trained on pseudo-labels, eliminating the need for manual annotations. We conduct an evaluation using metrics adapted for temporal instance segmentation. Computing these metrics requires temporally-consistent instance labels. When unavailable, we construct these labels using the available 3D bounding boxes and semantic labels in the dataset. We compare our method against strong baselines and demonstrate its superiority across two different outdoor Lidar datasets.
Read more9/14/2024