Momentum for the Win: Collaborative Federated Reinforcement Learning across Heterogeneous Environments
2405.19499
0
0

Abstract
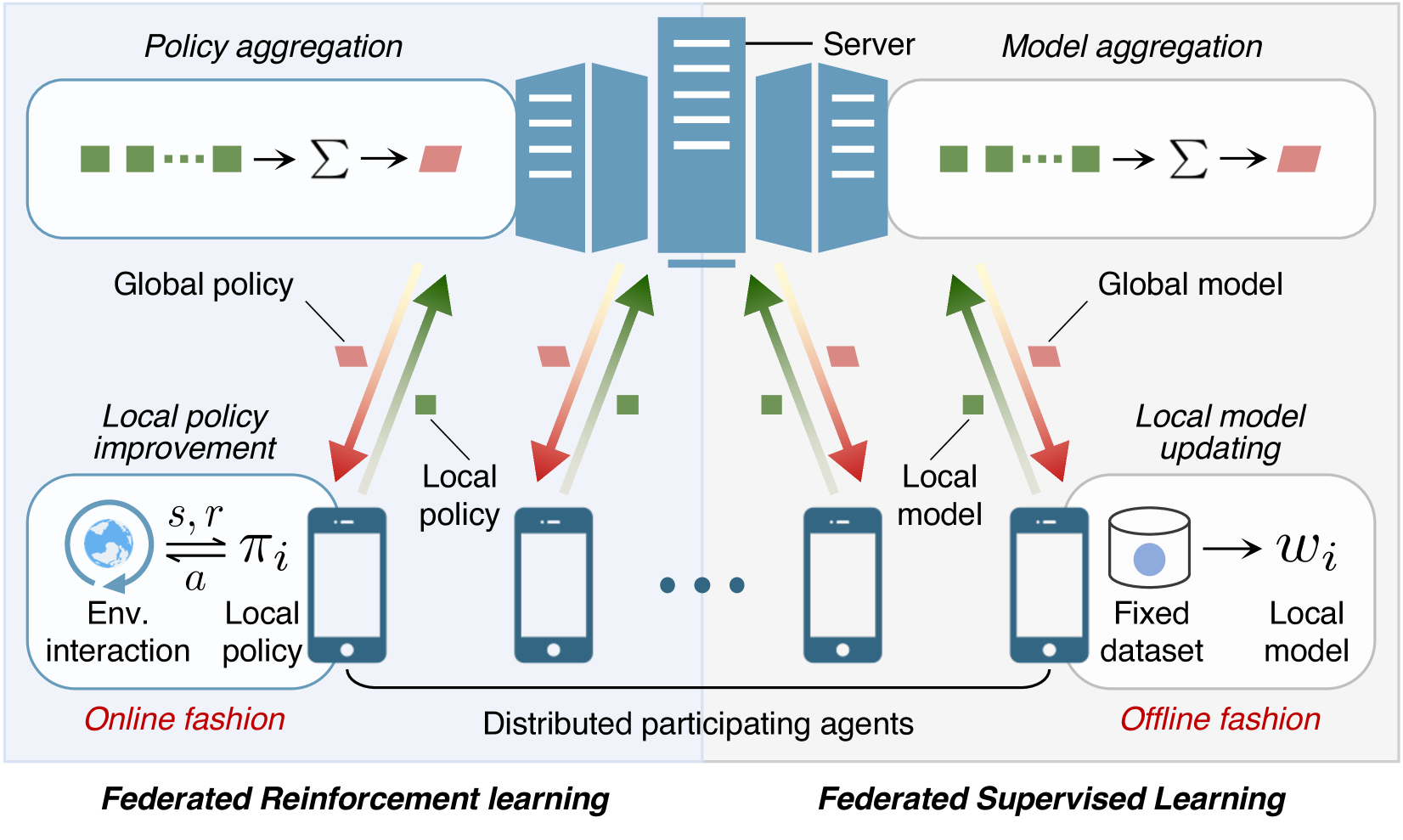
We explore a Federated Reinforcement Learning (FRL) problem where $N$ agents collaboratively learn a common policy without sharing their trajectory data. To date, existing FRL work has primarily focused on agents operating in the same or ``similar environments. In contrast, our problem setup allows for arbitrarily large levels of environment heterogeneity. To obtain the optimal policy which maximizes the average performance across all potentially completely different environments, we propose two algorithms: FedSVRPG-M and FedHAPG-M. In contrast to existing results, we demonstrate that both FedSVRPG-M and FedHAPG-M, both of which leverage momentum mechanisms, can exactly converge to a stationary point of the average performance function, regardless of the magnitude of environment heterogeneity. Furthermore, by incorporating the benefits of variance-reduction techniques or Hessian approximation, both algorithms achieve state-of-the-art convergence results, characterized by a sample complexity of $mathcal{O}left(epsilon^{-frac{3}{2}}/Nright)$. Notably, our algorithms enjoy linear convergence speedups with respect to the number of agents, highlighting the benefit of collaboration among agents in finding a common policy.
Create account to get full access
Overview
- This paper explores a new approach to federated reinforcement learning (FRL) called Momentum for the Win (MfW), which aims to improve the performance and efficiency of collaborative FRL across heterogeneous environments.
- FRL allows multiple agents to learn a shared policy by training on their local data and exchanging model updates, but can be challenging due to issues like data heterogeneity and communication constraints.
- MfW addresses these challenges by incorporating a momentum-based update rule and tailoring the communication and interaction protocols to the specific characteristics of the environment.
Plain English Explanation
Federated Reinforcement Learning (FRL) is a way for multiple AI agents to work together to learn a shared policy, even if they have access to different sets of training data. This can be useful in real-world scenarios where data is distributed across many locations.
However, FRL can be tricky to get right because the agents may have very different data and environments, which can make it hard for them to coordinate and learn effectively. Momentum for the Win (MfW) is a new approach that tries to address these challenges.
The key idea behind MfW is to use a "momentum-based" update rule when the agents exchange information about what they've learned. This helps the agents' policies converge more quickly and reliably, even when they're working with diverse data and environments.
MfW also tailors the communication and interaction protocols to the specific characteristics of the environment, rather than using a one-size-fits-all approach. This allows the agents to collaborate more effectively and make the best use of their limited communication resources.
Overall, MfW aims to make federated reinforcement learning more practical and effective, especially in situations where the participating agents have very different data and operating conditions. By addressing key challenges like data heterogeneity and communication constraints, MfW could help unlock the full potential of collaborative machine learning.
Technical Explanation
The paper proposes a new federated reinforcement learning (FRL) algorithm called Momentum for the Win (MfW), which incorporates a momentum-based update rule and tailors the communication and interaction protocols to the specific characteristics of the environment.
FRL allows multiple agents to collaboratively learn a shared policy by training on their local data and exchanging model updates. However, FRL can be challenging due to issues like data heterogeneity and communication constraints.
MfW addresses these challenges by:
- Incorporating a momentum-based update rule that helps the agents' policies converge more quickly and reliably, even in the presence of data and environment heterogeneity.
- Tailoring the communication and interaction protocols to the specific characteristics of the environment, rather than using a one-size-fits-all approach. This allows the agents to collaborate more effectively and make the best use of their limited communication resources.
The authors evaluate MfW on a range of simulated environments, including a robot motion planning task and a multi-agent scenario with a generative model. The results show that MfW outperforms other FRL approaches, particularly in terms of sample efficiency and scalability.
Critical Analysis
The paper presents a promising approach to addressing some of the key challenges in federated reinforcement learning, such as data heterogeneity and communication constraints. The authors provide a thorough theoretical analysis and extensive experimental evaluation to support the effectiveness of their MfW algorithm.
However, the paper also acknowledges several limitations and areas for future research. For example, the authors note that MfW may not be as effective in scenarios with extreme environment or data heterogeneity, and that further work is needed to address issues like partial observability and stochastic environments.
Additionally, the paper does not explore the implications of MfW for real-world applications, such as the potential for privacy violations or the computational and communication overhead involved in deploying the algorithm at scale. These are important considerations that could be addressed in future research.
Overall, the paper makes a valuable contribution to the field of federated reinforcement learning and provides a solid foundation for further developments in this area.
Conclusion
This paper introduces a new federated reinforcement learning algorithm called Momentum for the Win (MfW) that aims to improve the performance and efficiency of collaborative learning across heterogeneous environments. By incorporating a momentum-based update rule and tailoring the communication and interaction protocols, MfW addresses key challenges like data heterogeneity and communication constraints that can hinder the effectiveness of traditional FRL approaches.
The results demonstrate that MfW outperforms other FRL algorithms, particularly in terms of sample efficiency and scalability. While the paper acknowledges some limitations and areas for future research, it represents an important step forward in unlocking the full potential of collaborative machine learning in real-world scenarios with diverse data and operating conditions.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Finite-Time Analysis of On-Policy Heterogeneous Federated Reinforcement Learning
Chenyu Zhang, Han Wang, Aritra Mitra, James Anderson
0
0
Federated reinforcement learning (FRL) has emerged as a promising paradigm for reducing the sample complexity of reinforcement learning tasks by exploiting information from different agents. However, when each agent interacts with a potentially different environment, little to nothing is known theoretically about the non-asymptotic performance of FRL algorithms. The lack of such results can be attributed to various technical challenges and their intricate interplay: Markovian sampling, linear function approximation, multiple local updates to save communication, heterogeneity in the reward functions and transition kernels of the agents' MDPs, and continuous state-action spaces. Moreover, in the on-policy setting, the behavior policies vary with time, further complicating the analysis. In response, we introduce FedSARSA, a novel federated on-policy reinforcement learning scheme, equipped with linear function approximation, to address these challenges and provide a comprehensive finite-time error analysis. Notably, we establish that FedSARSA converges to a policy that is near-optimal for all agents, with the extent of near-optimality proportional to the level of heterogeneity. Furthermore, we prove that FedSARSA leverages agent collaboration to enable linear speedups as the number of agents increases, which holds for both fixed and adaptive step-size configurations.
4/16/2024
🏅
Federated Reinforcement Learning with Constraint Heterogeneity
Hao Jin, Liangyu Zhang, Zhihua Zhang
0
0
We study a Federated Reinforcement Learning (FedRL) problem with constraint heterogeneity. In our setting, we aim to solve a reinforcement learning problem with multiple constraints while $N$ training agents are located in $N$ different environments with limited access to the constraint signals and they are expected to collaboratively learn a policy satisfying all constraint signals. Such learning problems are prevalent in scenarios of Large Language Model (LLM) fine-tuning and healthcare applications. To solve the problem, we propose federated primal-dual policy optimization methods based on traditional policy gradient methods. Specifically, we introduce $N$ local Lagrange functions for agents to perform local policy updates, and these agents are then scheduled to periodically communicate on their local policies. Taking natural policy gradient (NPG) and proximal policy optimization (PPO) as policy optimization methods, we mainly focus on two instances of our algorithms, ie, {FedNPG} and {FedPPO}. We show that FedNPG achieves global convergence with an $tilde{O}(1/sqrt{T})$ rate, and FedPPO efficiently solves complicated learning tasks with the use of deep neural networks.
5/7/2024
Momentum-Based Federated Reinforcement Learning with Interaction and Communication Efficiency
Sheng Yue, Xingyuan Hua, Lili Chen, Ju Ren
0
0
Federated Reinforcement Learning (FRL) has garnered increasing attention recently. However, due to the intrinsic spatio-temporal non-stationarity of data distributions, the current approaches typically suffer from high interaction and communication costs. In this paper, we introduce a new FRL algorithm, named $texttt{MFPO}$, that utilizes momentum, importance sampling, and additional server-side adjustment to control the shift of stochastic policy gradients and enhance the efficiency of data utilization. We prove that by proper selection of momentum parameters and interaction frequency, $texttt{MFPO}$ can achieve $tilde{mathcal{O}}(H N^{-1}epsilon^{-3/2})$ and $tilde{mathcal{O}}(epsilon^{-1})$ interaction and communication complexities ($N$ represents the number of agents), where the interaction complexity achieves linear speedup with the number of agents, and the communication complexity aligns the best achievable of existing first-order FL algorithms. Extensive experiments corroborate the substantial performance gains of $texttt{MFPO}$ over existing methods on a suite of complex and high-dimensional benchmarks.
5/30/2024
✅
New!Federated Temporal Difference Learning with Linear Function Approximation under Environmental Heterogeneity
Han Wang, Aritra Mitra, Hamed Hassani, George J. Pappas, James Anderson
0
0
We initiate the study of federated reinforcement learning under environmental heterogeneity by considering a policy evaluation problem. Our setup involves $N$ agents interacting with environments that share the same state and action space but differ in their reward functions and state transition kernels. Assuming agents can communicate via a central server, we ask: Does exchanging information expedite the process of evaluating a common policy? To answer this question, we provide the first comprehensive finite-time analysis of a federated temporal difference (TD) learning algorithm with linear function approximation, while accounting for Markovian sampling, heterogeneity in the agents' environments, and multiple local updates to save communication. Our analysis crucially relies on several novel ingredients: (i) deriving perturbation bounds on TD fixed points as a function of the heterogeneity in the agents' underlying Markov decision processes (MDPs); (ii) introducing a virtual MDP to closely approximate the dynamics of the federated TD algorithm; and (iii) using the virtual MDP to make explicit connections to federated optimization. Putting these pieces together, we rigorously prove that in a low-heterogeneity regime, exchanging model estimates leads to linear convergence speedups in the number of agents.
7/2/2024