MonoForce: Self-supervised Learning of Physics-aware Model for Predicting Robot-terrain Interaction
2309.09007
0
0
📈
Abstract
While autonomous navigation of mobile robots on rigid terrain is a well-explored problem, navigating on deformable terrain such as tall grass or bushes remains a challenge. To address it, we introduce an explainable, physics-aware and end-to-end differentiable model which predicts the outcome of robot-terrain interaction from camera images, both on rigid and non-rigid terrain. The proposed MonoForce model consists of a black-box module which predicts robot-terrain interaction forces from onboard cameras, followed by a white-box module, which transforms these forces and a control signals into predicted trajectories, using only the laws of classical mechanics. The differentiable white-box module allows backpropagating the predicted trajectory errors into the black-box module, serving as a self-supervised loss that measures consistency between the predicted forces and ground-truth trajectories of the robot. Experimental evaluation on a public dataset and our data has shown that while the prediction capabilities are comparable to state-of-the-art algorithms on rigid terrain, MonoForce shows superior accuracy on non-rigid terrain such as tall grass or bushes. To facilitate the reproducibility of our results, we release both the code and datasets.
Create account to get full access
Overview
- The paper introduces a model called MonoForce that can predict the outcome of robot-terrain interaction using only camera images, even on deformable terrain like tall grass or bushes.
- The model consists of a black-box module that predicts the interaction forces, and a white-box module that transforms these forces and control signals into predicted trajectories using the laws of classical mechanics.
- The white-box module allows for backpropagation of the predicted trajectory errors into the black-box module, serving as a self-supervised loss to improve force prediction.
- Experiments show that while MonoForce performs comparably to state-of-the-art on rigid terrain, it has superior accuracy on non-rigid terrain.
Plain English Explanation
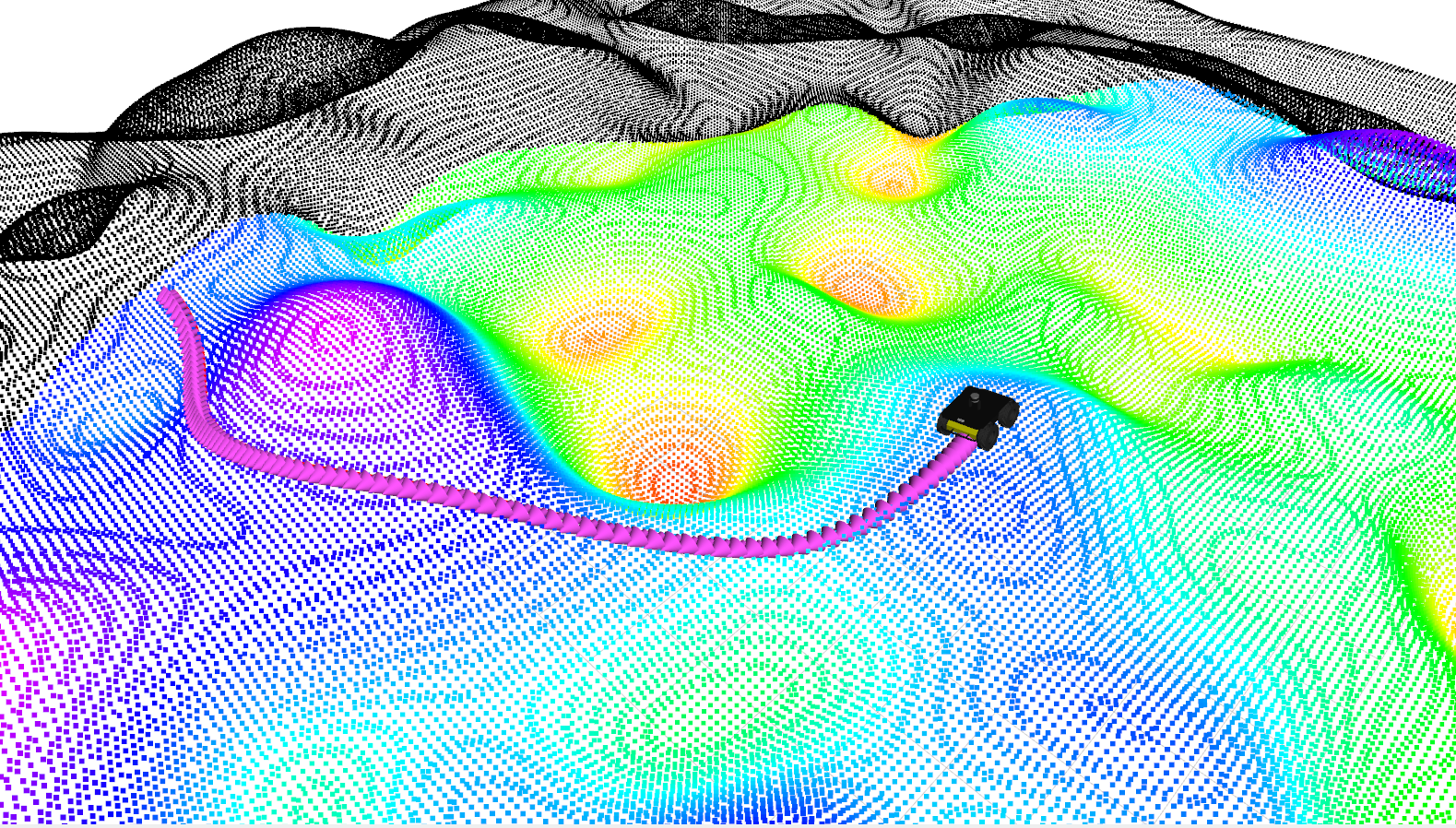
The paper tackles the challenge of navigating mobile robots on deformable terrain, such as tall grass or bushes, which is a difficult problem compared to navigating on rigid terrain. To address this, the researchers developed a model called MonoForce that can predict how a robot will interact with the terrain based solely on camera images, even for non-rigid surfaces.
MonoForce has two main components: a black-box module that predicts the forces acting on the robot from the camera images, and a white-box module that uses the laws of physics to transform these force predictions and control signals into predicted trajectories for the robot. The white-box module allows the errors in the predicted trajectories to be fed back into the black-box module, acting as a self-supervised signal to improve the force predictions.
Experiments showed that while MonoForce performs similarly to other state-of-the-art methods on rigid terrain, it has significantly better accuracy when it comes to predicting robot behavior on deformable surfaces like tall grass or bushes. This is an important advancement, as being able to navigate complex, non-rigid environments is a key challenge for autonomous mobile robots.
Technical Explanation
The paper introduces the MonoForce model, which is an explainable, physics-aware and end-to-end differentiable model for predicting the outcome of robot-terrain interaction from camera images. This is a challenging problem, especially on deformable terrain such as tall grass or bushes.
The MonoForce model consists of two main components:
- A black-box module that predicts the robot-terrain interaction forces from the onboard camera images.
- A white-box module that transforms these predicted forces, along with control signals, into predicted trajectories using the laws of classical mechanics.
The white-box module allows for the predicted trajectory errors to be backpropagated into the black-box module, serving as a self-supervised loss that measures the consistency between the predicted forces and the ground-truth robot trajectories.
Experimental evaluation on a public dataset and the researchers' own data showed that while MonoForce's prediction capabilities are comparable to state-of-the-art algorithms on rigid terrain, it demonstrates superior accuracy on non-rigid terrain such as tall grass or bushes.
Critical Analysis
The paper presents a novel and promising approach to the challenging problem of robot navigation on deformable terrain. The use of a white-box module to incorporate classical mechanics into the model is an interesting and potentially more interpretable approach compared to pure black-box models.
However, the paper does not provide a detailed analysis of the limitations or potential issues with the MonoForce model. For example, it is unclear how the model would perform on more complex or varied types of deformable terrain, or how it would scale to larger, more complex robot systems.
Additionally, the paper does not discuss the computational overhead or real-time performance of the model, which could be important considerations for deploying such a system in practical robotic applications.
Overall, the paper presents a compelling approach, but further research and analysis would be needed to fully evaluate the strengths, weaknesses, and potential real-world applicability of the MonoForce model.
Conclusion
The paper introduces the MonoForce model, a novel approach to predicting the outcome of robot-terrain interaction, even on deformable surfaces like tall grass or bushes. By combining a black-box module for force prediction with a white-box module that incorporates classical mechanics, MonoForce demonstrates superior accuracy on non-rigid terrain compared to state-of-the-art methods.
This research represents an important step forward in enabling autonomous mobile robots to navigate complex, real-world environments, which is a crucial capability for a wide range of applications. The open-sourcing of the code and datasets used in this work is also commendable, as it will facilitate further research and development in this area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📈
Model Predictive Control for Aggressive Driving Over Uneven Terrain
Tyler Han, Alex Liu, Anqi Li, Alex Spitzer, Guanya Shi, Byron Boots
0
0
Terrain traversability in unstructured off-road autonomy has traditionally relied on semantic classification, resource-intensive dynamics models, or purely geometry-based methods to predict vehicle-terrain interactions. While inconsequential at low speeds, uneven terrain subjects our full-scale system to safety-critical challenges at operating speeds of 7--10 m/s. This study focuses particularly on uneven terrain such as hills, banks, and ditches. These common high-risk geometries are capable of disabling the vehicle and causing severe passenger injuries if poorly traversed. We introduce a physics-based framework for identifying traversability constraints on terrain dynamics. Using this framework, we derive two fundamental constraints, each with a focus on mitigating rollover and ditch-crossing failures while being fully parallelizable in the sample-based Model Predictive Control (MPC) framework. In addition, we present the design of our planning and control system, which implements our parallelized constraints in MPC and utilizes a low-level controller to meet the demands of our aggressive driving without prior information about the environment and its dynamics. Through real-world experimentation and traversal of hills and ditches, we demonstrate that our approach captures fundamental elements of safe and aggressive autonomy over uneven terrain. Our approach improves upon geometry-based methods by completing comprehensive off-road courses up to 22% faster while maintaining safe operation.
6/11/2024
Bi-level Trajectory Optimization on Uneven Terrains with Differentiable Wheel-Terrain Interaction Model
Amith Manoharan, Aditya Sharma, Himani Belsare, Kaustab Pal, K. Madhava Krishna, Arun Kumar Singh
0
0
Navigation of wheeled vehicles on uneven terrain necessitates going beyond the 2D approaches for trajectory planning. Specifically, it is essential to incorporate the full 6dof variation of vehicle pose and its associated stability cost in the planning process. To this end, most recent works aim to learn a neural network model to predict the vehicle evolution. However, such approaches are data-intensive and fraught with generalization issues. In this paper, we present a purely model-based approach that just requires the digital elevation information of the terrain. Specifically, we express the wheel-terrain interaction and 6dof pose prediction as a non-linear least squares (NLS) problem. As a result, trajectory planning can be viewed as a bi-level optimization. The inner optimization layer predicts the pose on the terrain along a given trajectory, while the outer layer deforms the trajectory itself to reduce the stability and kinematic costs of the pose. We improve the state-of-the-art in the following respects. First, we show that our NLS based pose prediction closely matches the output from a high-fidelity physics engine. This result coupled with the fact that we can query gradients of the NLS solver, makes our pose predictor, a differentiable wheel-terrain interaction model. We further leverage this differentiability to efficiently solve the proposed bi-level trajectory optimization problem. Finally, we perform extensive experiments, and comparison with a baseline to showcase the effectiveness of our approach in obtaining smooth, stable trajectories.
4/12/2024

Accurate Pose Prediction on Signed Distance Fields for Mobile Ground Robots in Rough Terrain
Martin Oehler, Oskar von Stryk
0
0
Autonomous locomotion for mobile ground robots in unstructured environments such as waypoint navigation or flipper control requires a sufficiently accurate prediction of the robot-terrain interaction. Heuristics like occupancy grids or traversability maps are widely used but limit actions available to robots with active flippers as joint positions are not taken into account. We present a novel iterative geometric method to predict the 3D pose of mobile ground robots with active flippers on uneven ground with high accuracy and online planning capabilities. This is achieved by utilizing the ability of signed distance fields to represent surfaces with sub-voxel accuracy. The effectiveness of the presented approach is demonstrated on two different tracked robots in simulation and on a real platform. Compared to a tracking system as ground truth, our method predicts the robot position and orientation with an average accuracy of 3.11 cm and 3.91{deg}, outperforming a recent heightmap-based approach. The implementation is made available as an open-source ROS package.
5/6/2024
QuAD: Query-based Interpretable Neural Motion Planning for Autonomous Driving
Sourav Biswas, Sergio Casas, Quinlan Sykora, Ben Agro, Abbas Sadat, Raquel Urtasun
0
0
A self-driving vehicle must understand its environment to determine the appropriate action. Traditional autonomy systems rely on object detection to find the agents in the scene. However, object detection assumes a discrete set of objects and loses information about uncertainty, so any errors compound when predicting the future behavior of those agents. Alternatively, dense occupancy grid maps have been utilized to understand free-space. However, predicting a grid for the entire scene is wasteful since only certain spatio-temporal regions are reachable and relevant to the self-driving vehicle. We present a unified, interpretable, and efficient autonomy framework that moves away from cascading modules that first perceive, then predict, and finally plan. Instead, we shift the paradigm to have the planner query occupancy at relevant spatio-temporal points, restricting the computation to those regions of interest. Exploiting this representation, we evaluate candidate trajectories around key factors such as collision avoidance, comfort, and progress for safety and interpretability. Our approach achieves better highway driving quality than the state-of-the-art in high-fidelity closed-loop simulations.
4/3/2024