MorphoMove: Bi-Modal Path Planner with MPC-based Path Follower for Multi-Limb Morphogenetic UAV

0

Sign in to get full access
Overview
• This paper presents MorphoMove, a bi-modal path planner with an MPC-based path follower for a multi-limb morphogenetic UAV. • The key innovation is the integration of a global path planning module and a local path following controller to enable the UAV to navigate complex environments effectively. • The proposed system is evaluated through simulations and experiments, demonstrating its ability to handle challenging scenarios and outperform existing approaches.
Plain English Explanation
The paper describes a new way for a unique type of drone, called a "multi-limb morphogenetic UAV," to navigate through complex environments. This drone has the ability to change its shape and move in different ways, which can be very useful for navigating tight spaces or uneven terrain.
The key idea is to use two different "modes" of planning and control to guide the drone's movement. First, there is a "global" path planner that looks at the overall route the drone needs to take from start to finish. This planner uses advanced algorithms to find an optimal path that avoids obstacles and reaches the desired destination.
Second, there is a "local" path follower that continuously adjusts the drone's movements to stay on this global path. This follower uses a technique called Model Predictive Control (MPC) to constantly predict the drone's future motion and make small corrections to keep it on track.
By combining these two modes - global planning and local following - the researchers were able to create a very capable navigation system for their unique drone design. Through simulations and real-world experiments, they showed that this "MorphoMove" system could handle complex environments and outperform other existing approaches.
The key benefits of this approach are the drone's ability to adapt its shape and move in flexible ways, while still being able to plan efficient routes and precisely follow them. This could enable these drones to access hard-to-reach areas and navigate challenging terrains that would be difficult for more traditional drone designs.
Technical Explanation
The paper presents the "MorphoMove" system, which integrates a global path planning module and an MPC-based path following controller to enable a multi-limb morphogenetic UAV to navigate complex environments.
The global path planner uses a bi-modal planning approach to generate an optimal collision-free path from start to goal. This incorporates both discrete decision-making for high-level maneuvers and continuous optimization for detailed trajectory generation.
The local path follower then employs an MPC-based control scheme to continuously adjust the UAV's motion and maintain the desired trajectory. This integrated dynamic planning and control framework allows the system to handle complex environments and disturbances effectively.
Extensive simulations and real-world experiments demonstrate the effectiveness of the MorphoMove approach. It is shown to outperform existing path planning and following methods, especially in terms of navigating tight spaces and uneven terrain that leverages the morphogenetic capabilities of the UAV.
Critical Analysis
The paper presents a promising approach for enabling morphogenetic UAVs to navigate complex environments. The integration of global path planning and local path following is a well-reasoned strategy that addresses the unique challenges of this type of aerial vehicle.
However, the research does not fully explore the limitations of the system. For example, the extent to which the morphogenetic capabilities can be leveraged is not clearly quantified, and the performance impacts of different morphological configurations are not investigated in depth. Additionally, the computational complexity and real-time implementation of the bi-modal planning and MPC-based control schemes are not thoroughly discussed.
Further research could delve into these areas to better understand the tradeoffs and boundaries of the MorphoMove approach. Validating the system's performance in more diverse and realistic environments, as well as assessing its robustness to sensor noise and uncertainty, would also strengthen the conclusions.
Overall, this work represents an important step forward in the development of advanced navigation systems for morphogenetic UAVs. The integration of global and local control strategies is a compelling concept that merits continued exploration and refinement.
Conclusion
The MorphoMove system presented in this paper introduces a novel approach for enabling multi-limb morphogenetic UAVs to navigate complex environments effectively. By combining a global path planning module and an MPC-based local path follower, the researchers have developed a powerful navigation framework that can leverage the unique capabilities of this type of aerial vehicle.
The key contributions of this work include the bi-modal planning strategy, the integration of discrete and continuous optimization, and the MPC-based control scheme. Through extensive simulations and real-world experiments, the researchers have demonstrated the advantages of the MorphoMove system over existing methods, particularly in terms of navigating tight spaces and uneven terrain.
While the research presents a promising step forward, there are opportunities for further exploration and refinement to fully understand the system's limitations and potential. Investigating the impacts of different morphological configurations, assessing computational complexity, and validating performance in diverse environments could all lead to valuable insights and improvements.
Overall, the MorphoMove system represents an important advancement in the field of autonomous aerial navigation, paving the way for more versatile and capable morphogenetic UAVs to operate in challenging environments. As the technology continues to evolve, the implications of this research could extend to a wide range of applications, from search and rescue operations to infrastructure inspection and maintenance.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
MorphoMove: Bi-Modal Path Planner with MPC-based Path Follower for Multi-Limb Morphogenetic UAV
Muhammad Ahsan Mustafa, Yasheerah Yaqoot, Mikhail Martynov, Sausar Karaf, Dzmitry Tsetserukou
This paper discusses developments for a multi-limb morphogenetic UAV, MorphoGear, that is capable of both aerial flight and ground locomotion. A hybrid path planning algorithm based on the A* strategy has been developed, enabling seamless transition between air-to-ground navigation modes, thereby enhancing robot's mobility in complex environments. Moreover, precise path following is achieved during ground locomotion with a Model Predictive Control (MPC) architecture for its novel walking behaviour. Experimental validation was conducted in the Unity simulation environment utilizing Python scripts to compute control values. The algorithm's performance is validated by the Root Mean Squared Error (RMSE) of 0.91 cm and a maximum error of 1.85 cm, as demonstrated by the results. These developments highlight the adaptability of MorphoGear in navigation through cluttered environments, establishing it as a usable tool in autonomous exploration, both aerial and ground-based.
Read more8/22/2024
0
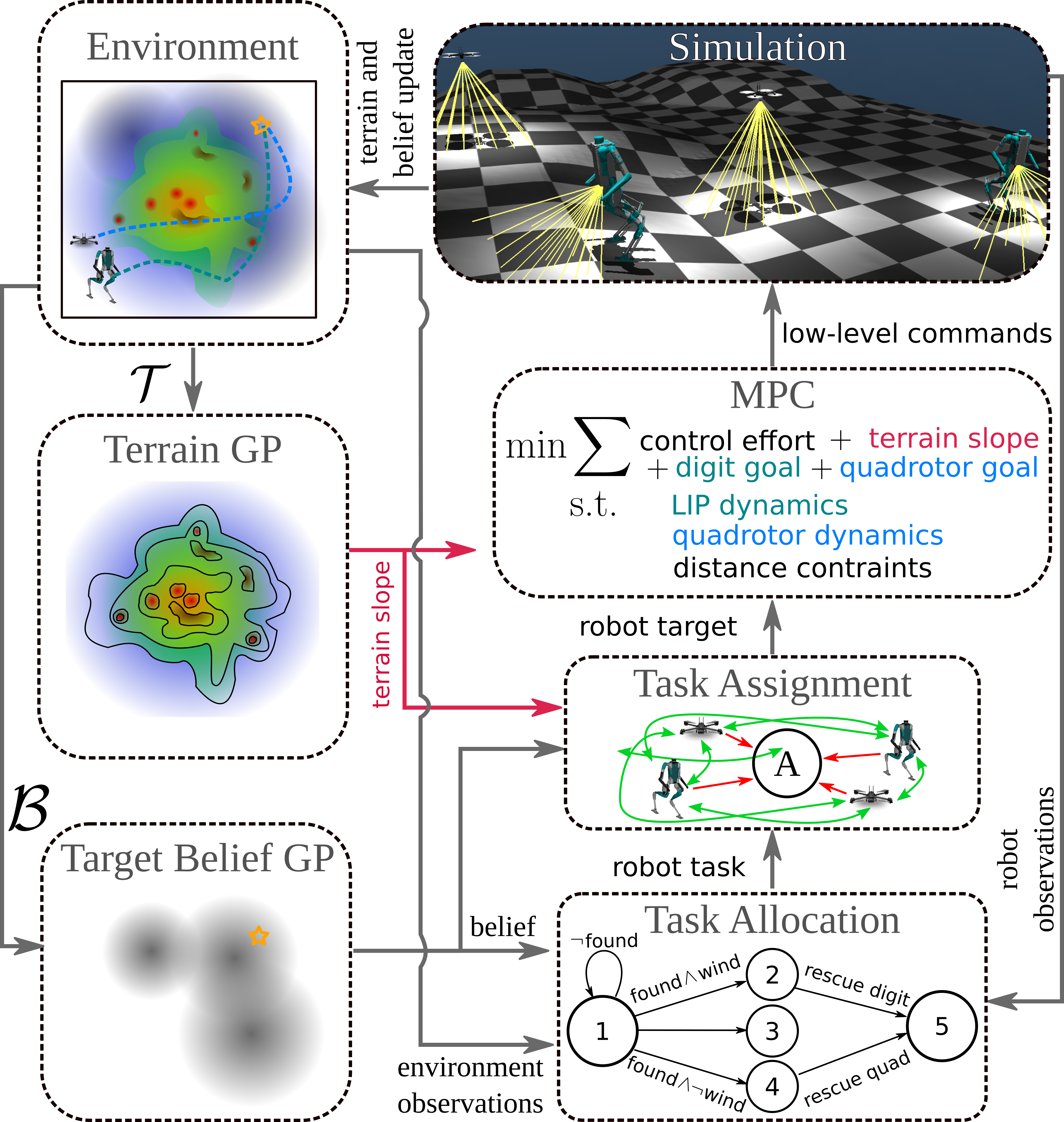
Terrain-Aware Model Predictive Control of Heterogeneous Bipedal and Aerial Robot Coordination for Search and Rescue Tasks
Abdulaziz Shamsah, Jesse Jiang, Ziwon Yoon, Samuel Coogan, Ye Zhao
Humanoid robots offer significant advantages for search and rescue tasks, thanks to their capability to traverse rough terrains and perform transportation tasks. In this study, we present a task and motion planning framework for search and rescue operations using a heterogeneous robot team composed of humanoids and aerial robots. We propose a terrain-aware Model Predictive Controller (MPC) that incorporates terrain elevation gradients learned using Gaussian processes (GP). This terrain-aware MPC generates safe navigation paths for the bipedal robots to traverse rough terrain while minimizing terrain slopes, and it directs the quadrotors to perform aerial search and mapping tasks. The rescue subjects' locations are estimated by a target belief GP, which is updated online during the map exploration. A high-level planner for task allocation is designed by encoding the navigation tasks using syntactically cosafe Linear Temporal Logic (scLTL), and a consensus-based algorithm is designed for task assignment of individual robots. We evaluate the efficacy of our planning framework in simulation in an uncertain environment with various terrains and random rescue subject placements.
Read more9/24/2024

0
Model Predictive Path Integral Control for Agile Unmanned Aerial Vehicles
Michal Minarik, Robert Penicka, Vojtech Vonasek, Martin Saska
This paper introduces a control architecture for real-time and onboard control of Unmanned Aerial Vehicles (UAVs) in environments with obstacles using the Model Predictive Path Integral (MPPI) methodology. MPPI allows the use of the full nonlinear model of UAV dynamics and a more general cost function at the cost of a high computational demand. To run the controller in real-time, the sampling-based optimization is performed in parallel on a graphics processing unit onboard the UAV. We propose an approach to the simulation of the nonlinear system which respects low-level constraints, while also able to dynamically handle obstacle avoidance, and prove that our methods are able to run in real-time without the need for external computers. The MPPI controller is compared to MPC and SE(3) controllers on the reference tracking task, showing a comparable performance. We demonstrate the viability of the proposed method in multiple simulation and real-world experiments, tracking a reference at up to 44 km/h and acceleration close to 20 m/s^2, while still being able to avoid obstacles. To the best of our knowledge, this is the first method to demonstrate an MPPI-based approach in real flight.
Read more7/16/2024
0
Learning to Walk and Fly with Adversarial Motion Priors
Giuseppe L'Erario, Drew Hanover, Angel Romero, Yunlong Song, Gabriele Nava, Paolo Maria Viceconte, Daniele Pucci, Davide Scaramuzza
Robot multimodal locomotion encompasses the ability to transition between walking and flying, representing a significant challenge in robotics. This work presents an approach that enables automatic smooth transitions between legged and aerial locomotion. Leveraging the concept of Adversarial Motion Priors, our method allows the robot to imitate motion datasets and accomplish the desired task without the need for complex reward functions. The robot learns walking patterns from human-like gaits and aerial locomotion patterns from motions obtained using trajectory optimization. Through this process, the robot adapts the locomotion scheme based on environmental feedback using reinforcement learning, with the spontaneous emergence of mode-switching behavior. The results highlight the potential for achieving multimodal locomotion in aerial humanoid robotics through automatic control of walking and flying modes, paving the way for applications in diverse domains such as search and rescue, surveillance, and exploration missions. This research contributes to advancing the capabilities of aerial humanoid robots in terms of versatile locomotion in various environments.
Read more9/26/2024