Multi-Agent Obstacle Avoidance using Velocity Obstacles and Control Barrier Functions

0

Sign in to get full access
Overview
- This paper presents a multi-agent obstacle avoidance approach that combines velocity obstacles and control barrier functions.
- The proposed method allows agents to safely navigate dynamic environments while avoiding collisions with obstacles and other agents.
- The authors demonstrate the effectiveness of their approach through simulations and experiments involving multiple agents.
Plain English Explanation
In this research, the authors have developed a system that allows multiple autonomous agents, such as robots or drones, to navigate through complex, dynamic environments while avoiding collisions. The key idea is to combine two established concepts: velocity obstacles and control barrier functions.
Velocity obstacles is a technique that helps an agent identify the range of velocities that would lead to a collision with another object. By avoiding this "forbidden" velocity space, the agent can steer clear of obstacles.
Control barrier functions, on the other hand, are mathematical tools that can be used to enforce safety constraints, such as maintaining a minimum distance from obstacles. These functions act as virtual "barriers" that the agent must not cross.
By integrating these two approaches, the authors' system can guide each agent to find a safe path through the environment, taking into account the presence of both static obstacles and other moving agents. This allows the agents to coordinate their movements and avoid collisions, even in crowded and unpredictable situations.
The researchers have tested their method through computer simulations and real-world experiments, demonstrating its effectiveness in enabling multi-agent systems to navigate safely and efficiently.
Technical Explanation
The paper introduces a multi-agent obstacle avoidance approach that leverages velocity obstacles and control barrier functions.
The authors first define the problem setup, with multiple agents navigating a dynamic environment containing both static and moving obstacles. Each agent is equipped with a sensor suite that provides information about the surrounding obstacles and other agents.
To address the collision avoidance challenge, the researchers utilize velocity obstacles. This concept identifies the set of velocities that would lead to a collision between an agent and an obstacle. By avoiding this "forbidden" velocity space, the agents can steer clear of collisions.
The authors then introduce control barrier functions, which act as mathematical constraints to enforce safety requirements, such as maintaining a minimum distance from obstacles. These functions create virtual "barriers" that the agents must not cross, ensuring their trajectories remain safe.
By combining velocity obstacles and control barrier functions, the proposed approach allows each agent to continuously plan a collision-free path through the dynamic environment. The agents can coordinate their movements, adjusting their velocities and trajectories to navigate safely while avoiding both static obstacles and other moving agents.
The paper presents the mathematical formulation of the problem and the detailed algorithms for implementing the multi-agent obstacle avoidance system. The authors validate their approach through extensive simulations and real-world experiments, demonstrating the effectiveness of their method in enabling safe and efficient multi-agent navigation.
Critical Analysis
The paper presents a comprehensive and well-designed approach to multi-agent obstacle avoidance, leveraging established techniques like velocity obstacles and control barrier functions. The authors have thoroughly addressed the technical details and provided extensive experimental validation.
One potential limitation of the proposed method is its reliance on accurate sensor data and a reliable communication system between the agents. In real-world scenarios, sensor errors or communication failures could introduce challenges that the authors have not fully addressed.
Additionally, the paper focuses on the collision avoidance aspect, but does not delve into other important considerations, such as task allocation, coordination, or optimization of the overall system performance. These aspects could be explored in future research to enhance the practical applicability of the approach.
The authors acknowledge the need for further research to handle more complex environments, such as those with dynamic obstacles or human-robot interactions. Exploring these scenarios and developing more robust and adaptive algorithms could expand the versatility and practical relevance of the proposed method.
Conclusion
This paper presents a novel approach to multi-agent obstacle avoidance that combines velocity obstacles and control barrier functions. The proposed system enables autonomous agents to navigate dynamic environments safely while avoiding collisions with both static and moving obstacles.
The authors have provided a rigorous technical explanation and demonstrated the effectiveness of their method through simulations and real-world experiments. The integration of velocity obstacles and control barrier functions is a promising approach that can contribute to the development of more robust and reliable multi-agent systems for a wide range of applications, such as robotics, transportation, and disaster response.
While the current work focuses on the core collision avoidance aspect, future research could explore additional considerations, such as task allocation, coordination, and adaptability to more complex scenarios. Addressing these aspects could further enhance the practical utility of the proposed multi-agent obstacle avoidance system.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Multi-Agent Obstacle Avoidance using Velocity Obstacles and Control Barrier Functions
Alejandro S'anchez Roncero, Rafael I. Cabral Muchacho, Petter Ogren
Velocity Obstacles (VO) methods form a paradigm for collision avoidance strategies among moving obstacles and agents. While VO methods perform well in simple multi-agent environments, they don't guarantee safety and can show overly conservative behavior in common situations. In this paper, we propose to combine a VO-strategy for guidance with a CBF-approach for safety, which overcomes the overly conservative behavior of VOs and formally guarantees safety. We validate our method in a baseline comparison study, using 2nd order integrator and car-like dynamics. Results support that our method outperforms the baselines w.r.t. path smoothness, collision avoidance, and success rates.
Read more9/17/2024
📊
0
Velocity Obstacle for Polytopic Collision Avoidance for Distributed Multi-robot Systems
Jihao Huang, Jun Zeng, Xuemin Chi, Koushil Sreenath, Zhitao Liu, Hongye Su
Obstacle avoidance for multi-robot navigation with polytopic shapes is challenging. Existing works simplify the system dynamics or consider it as a convex or non-convex optimization problem with positive distance constraints between robots, which limits real-time performance and scalability. Additionally, generating collision-free behavior for polytopic-shaped robots is harder due to implicit and non-differentiable distance functions between polytopes. In this paper, we extend the concept of velocity obstacle (VO) principle for polytopic-shaped robots and propose a novel approach to construct the VO in the function of vertex coordinates and other robot's states. Compared with existing work about obstacle avoidance between polytopic-shaped robots, our approach is much more computationally efficient as the proposed approach for construction of VO between polytopes is optimization-free. Based on VO representation for polytopic shapes, we later propose a navigation approach for distributed multi-robot systems. We validate our proposed VO representation and navigation approach in multiple challenging scenarios including large-scale randomized tests, and our approach outperforms the state of art in many evaluation metrics, including completion rate, deadlock rate, and the average travel distance.
Read more6/11/2024
0
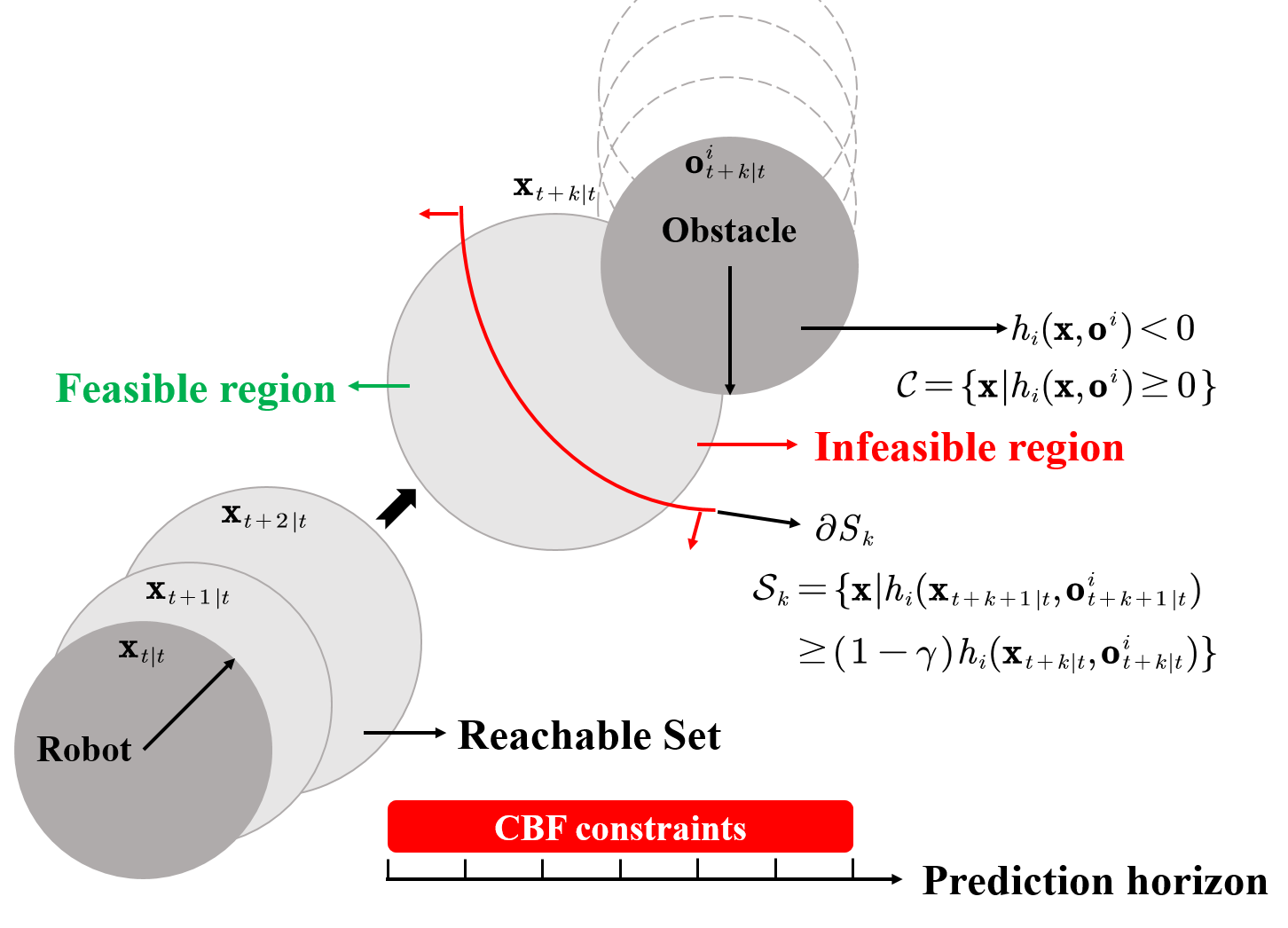
Robot Safe Planning In Dynamic Environments Based On Model Predictive Control Using Control Barrier Function
Zetao Lu, Kaijun Feng, Jun Xu, Haoyao Chen, Yunjiang Lou
Implementing obstacle avoidance in dynamic environments is a challenging problem for robots. Model predictive control (MPC) is a popular strategy for dealing with this type of problem, and recent work mainly uses control barrier function (CBF) as hard constraints to ensure that the system state remains in the safe set. However, in crowded scenarios, effective solutions may not be obtained due to infeasibility problems, resulting in degraded controller performance. We propose a new MPC framework that integrates CBF to tackle the issue of obstacle avoidance in dynamic environments, in which the infeasibility problem induced by hard constraints operating over the whole prediction horizon is solved by softening the constraints and introducing exact penalty, prompting the robot to actively seek out new paths. At the same time, generalized CBF is extended as a single-step safety constraint of the controller to enhance the safety of the robot during navigation. The efficacy of the proposed method is first shown through simulation experiments, in which a double-integrator system and a unicycle system are employed, and the proposed method outperforms other controllers in terms of safety, feasibility, and navigation efficiency. Furthermore, real-world experiment on an MR1000 robot is implemented to demonstrate the effectiveness of the proposed method.
Read more4/10/2024

0
Safe Control using Occupancy Grid Map-based Control Barrier Function (OGM-CBF)
Golnaz Raja, Teemu Mokkonen, Reza Ghabcheloo
Safe control in unknown environments is a significant challenge in robotics. While Control Barrier Functions (CBFs) are widely used to guarantee system safety, they often assume known environments with predefined obstacles. The proposed method constructs CBFs directly from perception sensor input and introduces a new first-order barrier function for a 3D kinematic robot motion model. The proposed CBF is constructed by combining Occupancy Grid Mapping (OGM) and Signed Distance Functions (SDF). The OGM framework abstracts sensor inputs, making the solution compatible with any sensor modality capable of generating occupancy maps. Moreover, the OGM enhances situational awareness along the robot's motion trajectory, by integrating both current and previously mapped data. The SDF encapsulates complex obstacle shapes defined by OGM into real-time computable values, enabling the method to handle obstacles of arbitrary shapes. This enables a single constraint in the CBF-QP optimization for each point on the robot, regardless of the number or shape of obstacles. The effectiveness of the proposed approach is demonstrated through simulations on autonomous driving in the CARLA simulator and real-world experiments with an industrial mobile robot, using a simplified 2D version of the method.
Read more9/16/2024