Multi-modal Integrated Prediction and Decision-making with Adaptive Interaction Modality Explorations

0

Sign in to get full access
Overview
- Presents a novel integrated prediction and decision-making framework that adaptively explores different interaction modalities
- Designed for autonomous driving applications to enable safe and efficient navigation in complex environments
- Combines multi-modal sensing, predictive modeling, and interactive decision-making capabilities
Plain English Explanation
This research paper introduces a new approach for autonomous vehicles to navigate complex environments. The key idea is to combine multiple sensory inputs, predictive modeling, and adaptive decision-making capabilities.
The system takes in data from various sensors on the vehicle, such as cameras, radar, and lidar. It then uses this information to predict the future behavior of other objects in the environment, like pedestrians and other vehicles.
Based on these predictions, the system can then plan the vehicle's actions in a way that navigates safely and efficiently. Crucially, the system can adaptively explore different ways of interacting with the environment, such as changing the sensor modalities or decision-making strategies, to find the most effective approach.
This integrated, adaptive framework aims to enable autonomous vehicles to handle the complexity of real-world driving scenarios more robustly than previous approaches that treated prediction and decision-making as separate, rigid processes.
Technical Explanation
The proposed framework consists of three key components:
-
Multi-modal Sensing and Prediction: This module takes in data from various sensors (e.g., cameras, radar, lidar) and uses deep learning-based predictive models to forecast the future states of other objects in the environment.
-
Interactive Decision-making: Based on the predictions, this component plans the vehicle's actions using a model-predictive control approach that explicitly considers interactions with the predicted objects.
-
Adaptive Interaction Modality Exploration: To improve performance, this module dynamically selects the most appropriate sensing and decision-making strategies by exploring different interaction modalities and evaluating their effectiveness.
The authors evaluate the proposed framework in simulation and demonstrate its ability to navigate complex driving scenarios more safely and efficiently compared to baseline approaches that treat prediction and decision-making separately.
Critical Analysis
The paper presents a well-designed, integrated framework that addresses several key challenges in autonomous driving, including robust multi-modal perception, accurate prediction of other agents' behaviors, and adaptive decision-making. The authors acknowledge that their approach relies on accurate predictive models, which can be challenging to obtain in practice due to the inherent uncertainty in real-world driving scenarios.
Additionally, the adaptive exploration of interaction modalities, while a promising idea, may introduce additional computational complexity that could hinder real-time performance. The authors do not provide a detailed analysis of the computational requirements and runtime performance of their approach.
Further research is needed to validate the framework's performance in real-world driving conditions, as well as to investigate strategies for effectively managing the trade-offs between different sensing and decision-making modalities.
Conclusion
This paper presents a novel integrated prediction and decision-making framework for autonomous driving that adaptively explores different interaction modalities. The key innovation is the combination of multi-modal sensing, predictive modeling, and adaptive decision-making capabilities to enable safe and efficient navigation in complex environments.
While the proposed approach shows promise, further research is needed to address the challenges of accurate predictive modeling and the computational complexity introduced by the adaptive modality exploration. Overall, this work represents an important step towards developing more robust and capable autonomous driving systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Multi-modal Integrated Prediction and Decision-making with Adaptive Interaction Modality Explorations
Tong Li, Lu Zhang, Sikang Liu, Shaojie Shen
Navigating dense and dynamic environments poses a significant challenge for autonomous driving systems, owing to the intricate nature of multimodal interaction, wherein the actions of various traffic participants and the autonomous vehicle are complex and implicitly coupled. In this paper, we propose a novel framework, Multi-modal Integrated predictioN and Decision-making (MIND), which addresses the challenges by efficiently generating joint predictions and decisions covering multiple distinctive interaction modalities. Specifically, MIND leverages learning-based scenario predictions to obtain integrated predictions and decisions with social-consistent interaction modality and utilizes a modality-aware dynamic branching mechanism to generate scenario trees that efficiently capture the evolutions of distinctive interaction modalities with low variation of interaction uncertainty along the planning horizon. The scenario trees are seamlessly utilized by the contingency planning under interaction uncertainty to obtain clear and considerate maneuvers accounting for multi-modal evolutions. Comprehensive experimental results in the closed-loop simulation based on the real-world driving dataset showcase superior performance to other strong baselines under various driving contexts.
Read more8/29/2024

0
DeepInteraction++: Multi-Modality Interaction for Autonomous Driving
Zeyu Yang, Nan Song, Wei Li, Xiatian Zhu, Li Zhang, Philip H. S. Torr
Existing top-performance autonomous driving systems typically rely on the multi-modal fusion strategy for reliable scene understanding. This design is however fundamentally restricted due to overlooking the modality-specific strengths and finally hampering the model performance. To address this limitation, in this work, we introduce a novel modality interaction strategy that allows individual per-modality representations to be learned and maintained throughout, enabling their unique characteristics to be exploited during the whole perception pipeline. To demonstrate the effectiveness of the proposed strategy, we design DeepInteraction++, a multi-modal interaction framework characterized by a multi-modal representational interaction encoder and a multi-modal predictive interaction decoder. Specifically, the encoder is implemented as a dual-stream Transformer with specialized attention operation for information exchange and integration between separate modality-specific representations. Our multi-modal representational learning incorporates both object-centric, precise sampling-based feature alignment and global dense information spreading, essential for the more challenging planning task. The decoder is designed to iteratively refine the predictions by alternately aggregating information from separate representations in a unified modality-agnostic manner, realizing multi-modal predictive interaction. Extensive experiments demonstrate the superior performance of the proposed framework on both 3D object detection and end-to-end autonomous driving tasks. Our code is available at https://github.com/fudan-zvg/DeepInteraction.
Read more8/16/2024
0
Scalable Multi-modal Model Predictive Control via Duality-based Interaction Predictions
Hansung Kim, Siddharth H. Nair, Francesco Borrelli
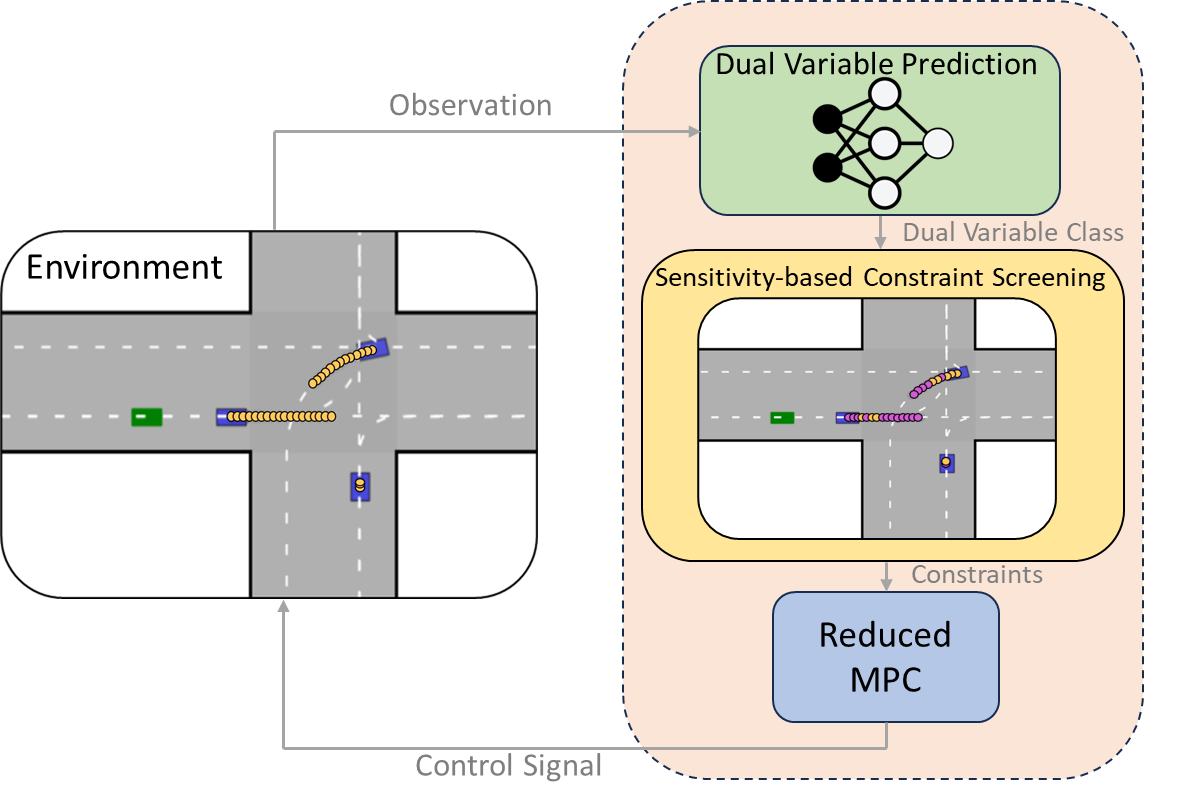
We propose a hierarchical architecture designed for scalable real-time Model Predictive Control (MPC) in complex, multi-modal traffic scenarios. This architecture comprises two key components: 1) RAID-Net, a novel attention-based Recurrent Neural Network that predicts relevant interactions along the MPC prediction horizon between the autonomous vehicle and the surrounding vehicles using Lagrangian duality, and 2) a reduced Stochastic MPC problem that eliminates irrelevant collision avoidance constraints, enhancing computational efficiency. Our approach is demonstrated in a simulated traffic intersection with interactive surrounding vehicles, showcasing a 12x speed-up in solving the motion planning problem. A video demonstrating the proposed architecture in multiple complex traffic scenarios can be found here: https://youtu.be/-pRiOnPb9_c. GitHub: https://github.com/MPC-Berkeley/hmpc_raidnet
Read more6/4/2024
🔮
0
Rethinking the Integration of Prediction and Planning in Deep Learning-Based Automated Driving Systems: A Review
Steffen Hagedorn, Marcel Hallgarten, Martin Stoll, Alexandru Condurache
Automated driving has the potential to revolutionize personal, public, and freight mobility. Beside accurately perceiving the environment, automated vehicles must plan a safe, comfortable, and efficient motion trajectory. To promote safety and progress, many works rely on modules that predict the future motion of surrounding traffic. Modular automated driving systems commonly handle prediction and planning as sequential, separate tasks. While this accounts for the influence of surrounding traffic on the ego vehicle, it fails to anticipate the reactions of traffic participants to the ego vehicle's behavior. Recent methods increasingly integrate prediction and planning in a joint or interdependent step to model bidirectional interactions. To date, a comprehensive overview of different integration principles is lacking. We systematically review state-of-the-art deep learning-based planning systems, and focus on how they integrate prediction. Different facets of the integration ranging from system architecture to high-level behavioral aspects are considered and related to each other. Moreover, we discuss the implications, strengths, and limitations of different integration principles. By pointing out research gaps, describing relevant future challenges, and highlighting trends in the research field, we identify promising directions for future research.
Read more9/12/2024