Multi-scale Feature Fusion with Point Pyramid for 3D Object Detection

0

Sign in to get full access
Overview
- The paper presents a multi-scale feature fusion approach using a point pyramid for 3D object detection from LiDAR point clouds.
- It aims to effectively capture features at different scales to improve 3D object detection performance.
- The proposed method, called Point Pyramid, combines multi-scale features from a point pyramid through a feature fusion module.
Plain English Explanation
The paper introduces a new technique for 3D object detection using LiDAR point cloud data. LiDAR is a technology that uses laser light to measure distances, and it is commonly used in self-driving cars and other autonomous systems.
The key idea is to capture features at different scales within the point cloud data. Objects of different sizes and distances from the sensor will have features at different scales. By combining these multi-scale features, the system can better recognize and locate 3D objects in the scene.
The proposed Point Pyramid approach builds a pyramid structure to extract features at multiple levels. It then uses a feature fusion module to combine these features in an effective way. This allows the system to take advantage of both fine-grained local details and broader contextual information when detecting 3D objects.
The key benefit of this approach is improved 3D object detection performance compared to previous methods that did not effectively leverage multi-scale features. This is important for applications like autonomous driving, where accurate 3D object detection is critical for safe navigation.
Technical Explanation
The paper introduces the Point Pyramid architecture for 3D object detection. It starts by encoding the input point cloud using a backbone network like PointNet++ to extract multi-scale features.
These multi-scale features are then organized into a point pyramid structure, where features at different spatial resolutions are stacked vertically. A feature fusion module is then used to combine the features from this pyramid in an efficient way.
The feature fusion module employs cross-scale attention to selectively emphasize the most relevant features across the different scales. This allows the model to focus on the most discriminative cues for accurate 3D object detection.
The fused multi-scale features are then passed through additional PV-RCNN -inspired modules to generate the final 3D object proposals and refine their bounding boxes.
Experiments on standard 3D object detection benchmarks like KITTI show that the Point Pyramid method outperforms previous state-of-the-art approaches, demonstrating the value of its multi-scale feature fusion strategy.
Critical Analysis
The paper provides a well-designed and thorough evaluation of the Point Pyramid approach, comparing it to several strong baselines on multiple 3D object detection metrics.
However, the paper does not discuss potential limitations or failure cases of the approach. For example, it's unclear how the method would perform in cluttered urban environments or with sparse point clouds. Additionally, the computational cost and inference speed of the approach are not thoroughly analyzed.
PV-RCNN and other recent 3D object detection methods not covered in this paper may offer alternative strategies for combining multi-scale features that could be worth exploring and comparing against.
Overall, the Point Pyramid is a promising contribution to the field of 3D object detection, but further research is needed to fully understand its strengths, limitations, and potential areas for improvement.
Conclusion
This paper presents the Point Pyramid approach, a novel multi-scale feature fusion technique for 3D object detection from LiDAR point clouds. By effectively combining features at different scales, the method achieves state-of-the-art performance on standard benchmarks.
The key innovation is the use of a point pyramid structure to organize multi-scale features, coupled with a feature fusion module that employs cross-scale attention to selectively emphasize the most relevant cues for 3D object detection.
This work advances the state of the art in 3D object detection, an important capability for autonomous vehicles and other robotics applications. The insights from this paper could also be applied to 3D perception tasks beyond just object detection, such as scene understanding and 3D semantic segmentation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Multi-scale Feature Fusion with Point Pyramid for 3D Object Detection
Weihao Lu, Dezong Zhao, Cristiano Premebida, Li Zhang, Wenjing Zhao, Daxin Tian
Effective point cloud processing is crucial to LiDARbased autonomous driving systems. The capability to understand features at multiple scales is required for object detection of intelligent vehicles, where road users may appear in different sizes. Recent methods focus on the design of the feature aggregation operators, which collect features at different scales from the encoder backbone and assign them to the points of interest. While efforts are made into the aggregation modules, the importance of how to fuse these multi-scale features has been overlooked. This leads to insufficient feature communication across scales. To address this issue, this paper proposes the Point Pyramid RCNN (POP-RCNN), a feature pyramid-based framework for 3D object detection on point clouds. POP-RCNN consists of a Point Pyramid Feature Enhancement (PPFE) module to establish connections across spatial scales and semantic depths for information exchange. The PPFE module effectively fuses multi-scale features for rich information without the increased complexity in feature aggregation. To remedy the impact of inconsistent point densities, a point density confidence module is deployed. This design integration enables the use of a lightweight feature aggregator, and the emphasis on both shallow and deep semantics, realising a detection framework for 3D object detection. With great adaptability, the proposed method can be applied to a variety of existing frameworks to increase feature richness, especially for long-distance detection. By adopting the PPFE in the voxel-based and point-voxel-based baselines, experimental results on KITTI and Waymo Open Dataset show that the proposed method achieves remarkable performance even with limited computational headroom.
Read more9/10/2024
0
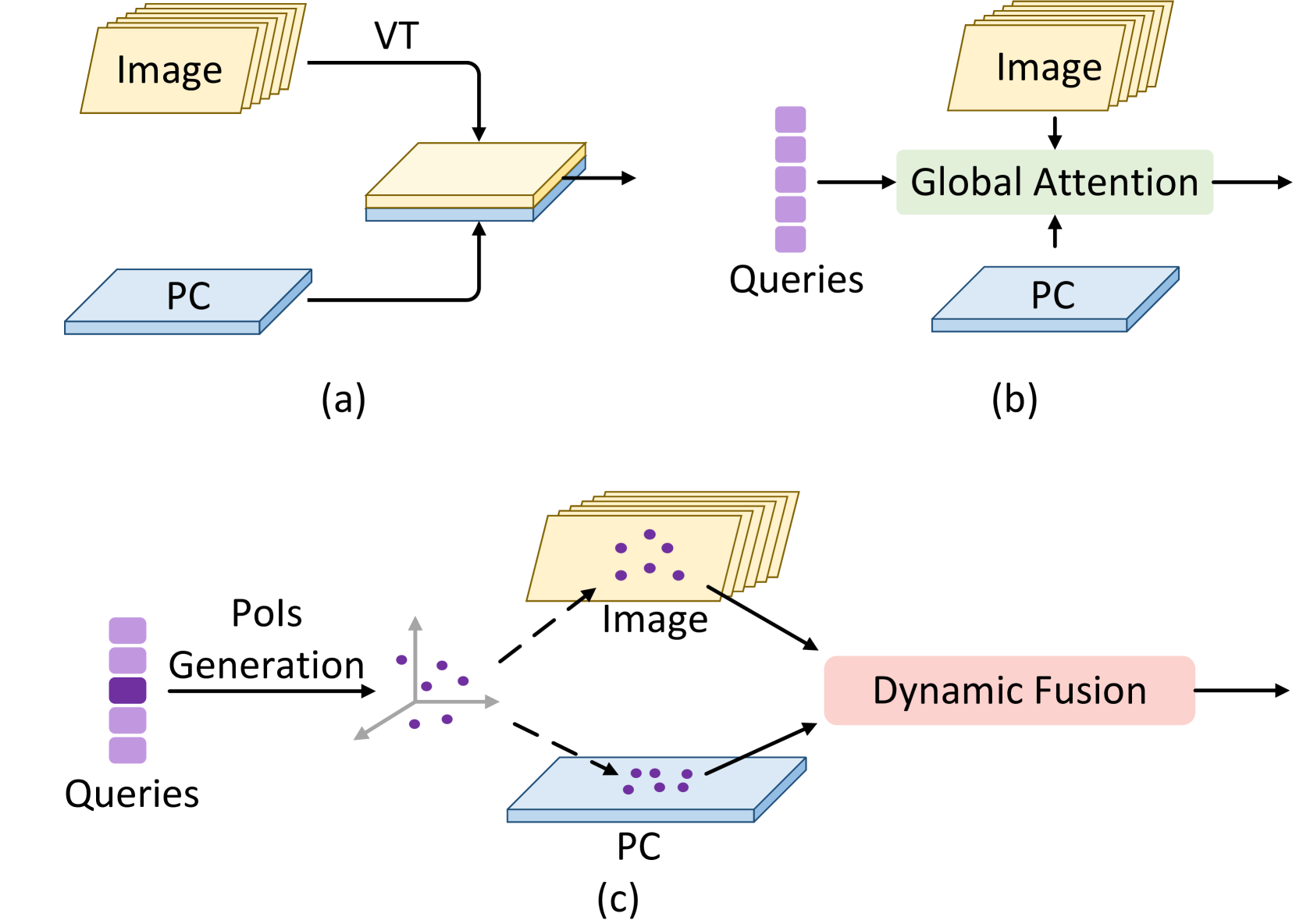
PoIFusion: Multi-Modal 3D Object Detection via Fusion at Points of Interest
Jiajun Deng, Sha Zhang, Feras Dayoub, Wanli Ouyang, Yanyong Zhang, Ian Reid
In this work, we present PoIFusion, a conceptually simple yet effective multi-modal 3D object detection framework to fuse the information of RGB images and LiDAR point clouds at the points of interest (PoIs). Different from the most accurate methods to date that transform multi-sensor data into a unified view or leverage the global attention mechanism to facilitate fusion, our approach maintains the view of each modality and obtains multi-modal features by computation-friendly projection and interpolation. In particular, our PoIFusion follows the paradigm of query-based object detection, formulating object queries as dynamic 3D boxes and generating a set of PoIs based on each query box. The PoIs serve as the keypoints to represent a 3D object and play the role of the basic units in multi-modal fusion. Specifically, we project PoIs into the view of each modality to sample the corresponding feature and integrate the multi-modal features at each PoI through a dynamic fusion block. Furthermore, the features of PoIs derived from the same query box are aggregated together to update the query feature. Our approach prevents information loss caused by view transformation and eliminates the computation-intensive global attention, making the multi-modal 3D object detector more applicable. We conducted extensive experiments on nuScenes and Argoverse2 datasets to evaluate our approach. Remarkably, the proposed approach achieves state-of-the-art results on both datasets without any bells and whistles, emph{i.e.}, 74.9% NDS and 73.4% mAP on nuScenes, and 31.6% CDS and 40.6% mAP on Argoverse2. The code will be made available at url{https://djiajunustc.github.io/projects/poifusion}.
Read more9/24/2024

0
PillarNeXt: Improving the 3D detector by introducing Voxel2Pillar feature encoding and extracting multi-scale features
Xusheng Li, Chengliang Wang, Shumao Wang, Zhuo Zeng, Ji Liu
The multi-line LiDAR is widely used in autonomous vehicles, so point cloud-based 3D detectors are essential for autonomous driving. Extracting rich multi-scale features is crucial for point cloud-based 3D detectors in autonomous driving due to significant differences in the size of different types of objects. However, because of the real-time requirements, large-size convolution kernels are rarely used to extract large-scale features in the backbone. Current 3D detectors commonly use feature pyramid networks to obtain large-scale features; however, some objects containing fewer point clouds are further lost during down-sampling, resulting in degraded performance. Since pillar-based schemes require much less computation than voxel-based schemes, they are more suitable for constructing real-time 3D detectors. Hence, we propose the PillarNeXt, a pillar-based scheme. We redesigned the feature encoding, the backbone, and the neck of the 3D detector. We propose the Voxel2Pillar feature encoding, which uses a sparse convolution constructor to construct pillars with richer point cloud features, especially height features. The Voxel2Pillar adds more learnable parameters to the feature encoding, enabling the initial pillars to have higher performance ability. We extract multi-scale and large-scale features in the proposed fully sparse backbone, which does not utilize large-size convolutional kernels; the backbone consists of the proposed multi-scale feature extraction module. The neck consists of the proposed sparse ConvNeXt, whose simple structure significantly improves the performance. We validate the effectiveness of the proposed PillarNeXt on the Waymo Open Dataset, and the object detection accuracy for vehicles, pedestrians, and cyclists is improved. We also verify the effectiveness of each proposed module in detail through ablation studies.
Read more5/21/2024
✨
0
PV-SSD: A Multi-Modal Point Cloud Feature Fusion Method for Projection Features and Variable Receptive Field Voxel Features
Yongxin Shao, Aihong Tan, Zhetao Sun, Enhui Zheng, Tianhong Yan, Peng Liao
LiDAR-based 3D object detection and classification is crucial for autonomous driving. However, real-time inference from extremely sparse 3D data is a formidable challenge. To address this problem, a typical class of approaches transforms the point cloud cast into a regular data representation (voxels or projection maps). Then, it performs feature extraction with convolutional neural networks. However, such methods often result in a certain degree of information loss due to down-sampling or over-compression of feature information. This paper proposes a multi-modal point cloud feature fusion method for projection features and variable receptive field voxel features (PV-SSD) based on projection and variable voxelization to solve the information loss problem. We design a two-branch feature extraction structure with a 2D convolutional neural network to extract the point cloud's projection features in bird's-eye view to focus on the correlation between local features. A voxel feature extraction branch is used to extract local fine-grained features. Meanwhile, we propose a voxel feature extraction method with variable sensory fields to reduce the information loss of voxel branches due to downsampling. It avoids missing critical point information by selecting more useful feature points based on feature point weights for the detection task. In addition, we propose a multi-modal feature fusion module for point clouds. To validate the effectiveness of our method, we tested it on the KITTI dataset and ONCE dataset.
Read more4/9/2024