Fast Generalizable Gaussian Splatting Reconstruction from Multi-View Stereo

0
Sign in to get full access
Overview
- This paper introduces a new method for fast and generalizable 3D reconstruction from multi-view stereo data using Gaussian splatting.
- The proposed approach, called GPS-Gaussian, is able to produce high-quality 3D geometry and texture reconstructions in real-time.
- The method builds on previous work on 3D Geometry-Aware Deformable Gaussian Splatting and Structure-Aware 3D Gaussian Splatting, further improving speed and generalization.
- The novel Surface Reconstruction from Gaussian Splatting via Novel View Synthesis approach enables high-quality novel view synthesis from the reconstructed 3D geometry.
Plain English Explanation
The paper presents a new method for quickly and accurately creating 3D models from multiple camera views. The key innovation is the use of Gaussian "splats" or shapes to represent the 3D geometry, rather than a dense set of 3D points. This Gaussian splatting approach allows the 3D reconstruction to be generated very efficiently, while still capturing fine details.
The method builds on previous work that used Gaussian splats for 3D reconstruction, but improves on the speed and ability to generalize to new scenes. By representing the 3D geometry with Gaussian shapes instead of individual points, the algorithm can produce high-quality 3D models in real-time, without requiring expensive computation.
Additionally, the paper introduces a new technique for generating novel views of the 3D scene from the reconstructed Gaussian splats. This enables the creation of smooth, high-quality 3D visualizations from the original multi-view data.
Overall, this work advances the state-of-the-art in efficient and generalizable 3D reconstruction from multi-view stereo data, with applications in areas like virtual/augmented reality, robotics, and 3D content creation.
Technical Explanation
The GPS-Gaussian approach represents 3D geometry using a set of Gaussian splats, where each splat corresponds to a pixel in the input images. This allows the 3D reconstruction to be computed efficiently in a single forward pass, without the need for expensive 3D optimization or refinement.
The method builds on previous work on 3D Geometry-Aware Deformable Gaussian Splatting and Structure-Aware 3D Gaussian Splatting, but introduces several key innovations to improve speed and generalization. These include a novel neural network architecture, a differentiable Gaussian splatting operation, and a multi-scale loss function.
The novel Surface Reconstruction from Gaussian Splatting via Novel View Synthesis approach then uses the reconstructed Gaussian splats to generate high-quality novel views of the 3D scene. This is achieved by learning to warp and composite the Gaussian splats in the target view, enabling smooth and detailed novel view synthesis.
The paper evaluates the GPS-Gaussian method on several multi-view stereo benchmarks, demonstrating state-of-the-art performance in terms of reconstruction quality and runtime. The authors also show the generalization capabilities of their approach by testing on diverse real-world scenes.
Critical Analysis
The paper presents a compelling approach for fast and generalizable 3D reconstruction from multi-view stereo data. The use of Gaussian splatting is a clever way to balance efficiency and reconstruction quality, and the novel view synthesis technique is a valuable addition.
One potential limitation is that the method may struggle with very complex or occluded scenes, as the Gaussian splats may not be able to fully capture the intricate 3D geometry. The authors acknowledge this and suggest exploring hierarchical or adaptive splat representations as future work.
Another area for improvement could be the incorporation of additional cues, such as semantic segmentation or instance-level information, to further enhance the 3D reconstructions. This could be particularly useful for applications like augmented reality or robotics, where semantic understanding of the 3D environment is crucial.
Overall, the GPS-Gaussian method represents a significant advance in efficient and generalizable 3D reconstruction, with promising applications in various domains. The critical analysis encourages readers to think carefully about the method's strengths, limitations, and potential for future development.
Conclusion
The paper introduces a novel approach for fast and generalizable 3D reconstruction from multi-view stereo data, called GPS-Gaussian. By representing the 3D geometry using Gaussian splats, the method is able to produce high-quality reconstructions in real-time, while also demonstrating strong generalization capabilities across diverse scenes.
The key contributions of this work include the efficient Gaussian splatting representation, the novel neural network architecture, and the surface reconstruction via novel view synthesis. These advances enable the GPS-Gaussian method to outperform state-of-the-art approaches in terms of both reconstruction quality and runtime performance.
The potential applications of this research are wide-ranging, from virtual/augmented reality and 3D content creation to robotics and autonomous systems. As the field of 3D reconstruction continues to evolve, the ideas presented in this paper could have a significant impact on the development of fast, accurate, and generalizable 3D modeling techniques.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Fast Generalizable Gaussian Splatting Reconstruction from Multi-View Stereo
Tianqi Liu, Guangcong Wang, Shoukang Hu, Liao Shen, Xinyi Ye, Yuhang Zang, Zhiguo Cao, Wei Li, Ziwei Liu
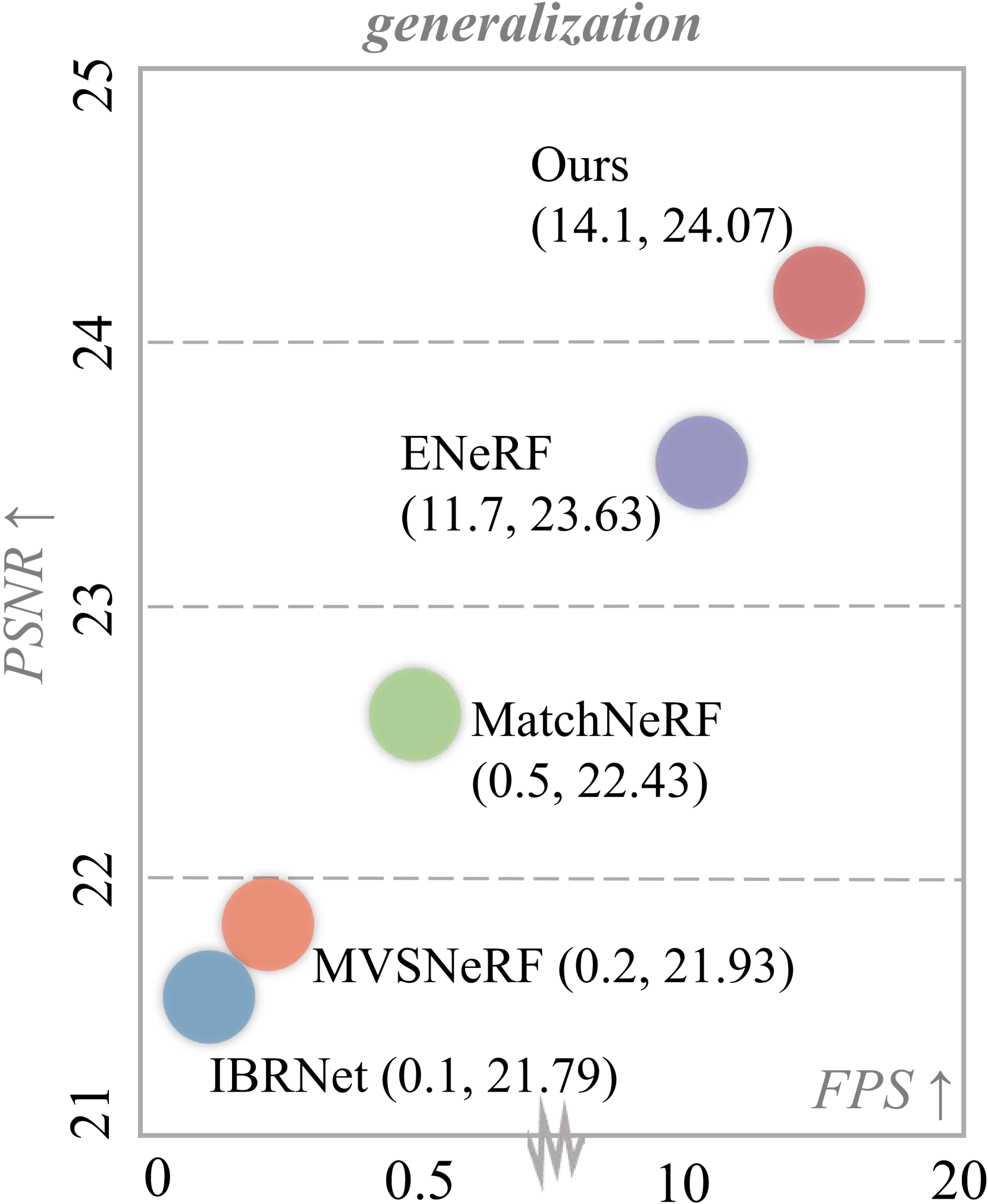
We present MVSGaussian, a new generalizable 3D Gaussian representation approach derived from Multi-View Stereo (MVS) that can efficiently reconstruct unseen scenes. Specifically, 1) we leverage MVS to encode geometry-aware Gaussian representations and decode them into Gaussian parameters. 2) To further enhance performance, we propose a hybrid Gaussian rendering that integrates an efficient volume rendering design for novel view synthesis. 3) To support fast fine-tuning for specific scenes, we introduce a multi-view geometric consistent aggregation strategy to effectively aggregate the point clouds generated by the generalizable model, serving as the initialization for per-scene optimization. Compared with previous generalizable NeRF-based methods, which typically require minutes of fine-tuning and seconds of rendering per image, MVSGaussian achieves real-time rendering with better synthesis quality for each scene. Compared with the vanilla 3D-GS, MVSGaussian achieves better view synthesis with less training computational cost. Extensive experiments on DTU, Real Forward-facing, NeRF Synthetic, and Tanks and Temples datasets validate that MVSGaussian attains state-of-the-art performance with convincing generalizability, real-time rendering speed, and fast per-scene optimization.
Read more7/16/2024

0
TranSplat: Generalizable 3D Gaussian Splatting from Sparse Multi-View Images with Transformers
Chuanrui Zhang, Yingshuang Zou, Zhuoling Li, Minmin Yi, Haoqian Wang
Compared with previous 3D reconstruction methods like Nerf, recent Generalizable 3D Gaussian Splatting (G-3DGS) methods demonstrate impressive efficiency even in the sparse-view setting. However, the promising reconstruction performance of existing G-3DGS methods relies heavily on accurate multi-view feature matching, which is quite challenging. Especially for the scenes that have many non-overlapping areas between various views and contain numerous similar regions, the matching performance of existing methods is poor and the reconstruction precision is limited. To address this problem, we develop a strategy that utilizes a predicted depth confidence map to guide accurate local feature matching. In addition, we propose to utilize the knowledge of existing monocular depth estimation models as prior to boost the depth estimation precision in non-overlapping areas between views. Combining the proposed strategies, we present a novel G-3DGS method named TranSplat, which obtains the best performance on both the RealEstate10K and ACID benchmarks while maintaining competitive speed and presenting strong cross-dataset generalization ability. Our code, and demos will be available at: https://xingyoujun.github.io/transplat.
Read more8/27/2024

0
Generalizable Human Gaussians for Sparse View Synthesis
Youngjoong Kwon, Baole Fang, Yixing Lu, Haoye Dong, Cheng Zhang, Francisco Vicente Carrasco, Albert Mosella-Montoro, Jianjin Xu, Shingo Takagi, Daeil Kim, Aayush Prakash, Fernando De la Torre
Recent progress in neural rendering has brought forth pioneering methods, such as NeRF and Gaussian Splatting, which revolutionize view rendering across various domains like AR/VR, gaming, and content creation. While these methods excel at interpolating {em within the training data}, the challenge of generalizing to new scenes and objects from very sparse views persists. Specifically, modeling 3D humans from sparse views presents formidable hurdles due to the inherent complexity of human geometry, resulting in inaccurate reconstructions of geometry and textures. To tackle this challenge, this paper leverages recent advancements in Gaussian Splatting and introduces a new method to learn generalizable human Gaussians that allows photorealistic and accurate view-rendering of a new human subject from a limited set of sparse views in a feed-forward manner. A pivotal innovation of our approach involves reformulating the learning of 3D Gaussian parameters into a regression process defined on the 2D UV space of a human template, which allows leveraging the strong geometry prior and the advantages of 2D convolutions. In addition, a multi-scaffold is proposed to effectively represent the offset details. Our method outperforms recent methods on both within-dataset generalization as well as cross-dataset generalization settings.
Read more7/18/2024

0
FreeSplat: Generalizable 3D Gaussian Splatting Towards Free-View Synthesis of Indoor Scenes
Yunsong Wang, Tianxin Huang, Hanlin Chen, Gim Hee Lee
Empowering 3D Gaussian Splatting with generalization ability is appealing. However, existing generalizable 3D Gaussian Splatting methods are largely confined to narrow-range interpolation between stereo images due to their heavy backbones, thus lacking the ability to accurately localize 3D Gaussian and support free-view synthesis across wide view range. In this paper, we present a novel framework FreeSplat that is capable of reconstructing geometrically consistent 3D scenes from long sequence input towards free-view synthesis.Specifically, we firstly introduce Low-cost Cross-View Aggregation achieved by constructing adaptive cost volumes among nearby views and aggregating features using a multi-scale structure. Subsequently, we present the Pixel-wise Triplet Fusion to eliminate redundancy of 3D Gaussians in overlapping view regions and to aggregate features observed across multiple views. Additionally, we propose a simple but effective free-view training strategy that ensures robust view synthesis across broader view range regardless of the number of views. Our empirical results demonstrate state-of-the-art novel view synthesis peformances in both novel view rendered color maps quality and depth maps accuracy across different numbers of input views. We also show that FreeSplat performs inference more efficiently and can effectively reduce redundant Gaussians, offering the possibility of feed-forward large scene reconstruction without depth priors.
Read more6/11/2024