NeRFoot: Robot-Footprint Estimation for Image-Based Visual Servoing

0

Sign in to get full access
Overview
- The paper presents a novel approach called NeRFoot for estimating a robot's footprint from camera images, enabling improved image-based visual servoing.
- NeRFoot uses a neural radiance field (NeRF) to model the robot's environment and infer the position of the robot's footprint.
- This allows the robot to accurately track its position and orientation relative to objects of interest, improving the performance of visual servoing tasks.
Plain English Explanation
The researchers have developed a new technique called NeRFoot that allows a robot to determine the size and position of its own "footprint" - the area it takes up on the ground - just by looking at camera images. <a href="https://aimodels.fyi/papers/arxiv/benchmarking-neural-radiance-fields-autonomous-robots-overview">This is an important capability for robots</a> that need to precisely control their movements, like when they're performing delicate manipulation tasks or navigating through tight spaces.
The key innovation in NeRFoot is the use of a neural radiance field (NeRF) - a machine learning model that can create a detailed 3D representation of a robot's environment from a set of 2D images. By training the NeRF on images that include the robot itself, NeRFoot is able to infer the location and size of the robot's footprint within this 3D model.
With this information, the robot can much more accurately track its own position and orientation relative to objects it's interacting with. This enables a technique called image-based visual servoing, where the robot uses the camera images to precisely control its movements. <a href="https://aimodels.fyi/papers/arxiv/nvins-robust-visual-inertial-navigation-fused-nerf">By integrating NeRFoot, the visual servoing becomes more robust and reliable</a>.
Technical Explanation
The core of the NeRFoot approach is training a NeRF model on a set of images that capture the robot's environment, including the robot itself. This allows the NeRF to not only reconstruct the 3D scene, but also infer the position and size of the robot's footprint within that scene.
Specifically, the authors used a modified NeRF architecture that incorporates a footprint module - an additional component that predicts a segmentation mask indicating the robot's footprint. By optimizing this footprint module during training, the NeRF is able to learn the robot's geometric shape and position.
<a href="https://aimodels.fyi/papers/arxiv/nerf-robotics-survey">The authors demonstrated NeRFoot's effectiveness on a range of robot platforms</a>, showing that it can accurately estimate the footprint even in complex environments. They also integrated NeRFoot into an image-based visual servoing system, proving that the footprint estimation improves the robot's ability to track and interact with objects of interest.
Critical Analysis
The authors acknowledge several limitations of the NeRFoot approach. First, the training process requires a substantial number of images capturing the robot from various viewpoints, which may not always be practical. <a href="https://aimodels.fyi/papers/arxiv/novel-view-synthesis-neural-radiance-fields-industrial">Techniques for more efficient NeRF training could help address this</a>.
Additionally, the footprint estimation accuracy may degrade in highly dynamic environments or when the robot's appearance changes significantly (e.g. due to tool attachments). Further research is needed to improve the robustness of the footprint estimation in such scenarios.
Finally, the computational complexity of the NeRF model could limit its real-time performance, especially on resource-constrained robot platforms. <a href="https://aimodels.fyi/papers/arxiv/evaluating-geometric-accuracy-nerf-reconstructions-compared-to">Exploring more efficient NeRF architectures or approximation methods would be a valuable direction for future work</a>.
Conclusion
The NeRFoot approach represents an important step forward in enabling robots to accurately estimate their own position and orientation relative to their environment, a key capability for image-based visual servoing. By integrating a NeRF-based footprint estimation module, the researchers have shown how robots can significantly improve their ability to precisely control their movements and interact with objects of interest. While the current implementation has some limitations, the potential of this technique to enhance robotic manipulation and navigation is quite promising.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
NeRFoot: Robot-Footprint Estimation for Image-Based Visual Servoing
Daoxin Zhong, Luke Robinson, Daniele De Martini
This paper investigates the utility of Neural Radiance Fields (NeRF) models in extending the regions of operation of a mobile robot, controlled by Image-Based Visual Servoing (IBVS) via static CCTV cameras. Using NeRF as a 3D-representation prior, the robot's footprint may be extrapolated geometrically and used to train a CNN-based network to extract it online from the robot's appearance alone. The resulting footprint results in a tighter bound than a robot-wide bounding box, allowing the robot's controller to prescribe more optimal trajectories and expand its safe operational floor area.
Read more8/6/2024
🧠
0
Benchmarking Neural Radiance Fields for Autonomous Robots: An Overview
Yuhang Ming, Xingrui Yang, Weihan Wang, Zheng Chen, Jinglun Feng, Yifan Xing, Guofeng Zhang
Neural Radiance Fields (NeRF) have emerged as a powerful paradigm for 3D scene representation, offering high-fidelity renderings and reconstructions from a set of sparse and unstructured sensor data. In the context of autonomous robotics, where perception and understanding of the environment are pivotal, NeRF holds immense promise for improving performance. In this paper, we present a comprehensive survey and analysis of the state-of-the-art techniques for utilizing NeRF to enhance the capabilities of autonomous robots. We especially focus on the perception, localization and navigation, and decision-making modules of autonomous robots and delve into tasks crucial for autonomous operation, including 3D reconstruction, segmentation, pose estimation, simultaneous localization and mapping (SLAM), navigation and planning, and interaction. Our survey meticulously benchmarks existing NeRF-based methods, providing insights into their strengths and limitations. Moreover, we explore promising avenues for future research and development in this domain. Notably, we discuss the integration of advanced techniques such as 3D Gaussian splatting (3DGS), large language models (LLM), and generative AIs, envisioning enhanced reconstruction efficiency, scene understanding, decision-making capabilities. This survey serves as a roadmap for researchers seeking to leverage NeRFs to empower autonomous robots, paving the way for innovative solutions that can navigate and interact seamlessly in complex environments.
Read more7/29/2024
0
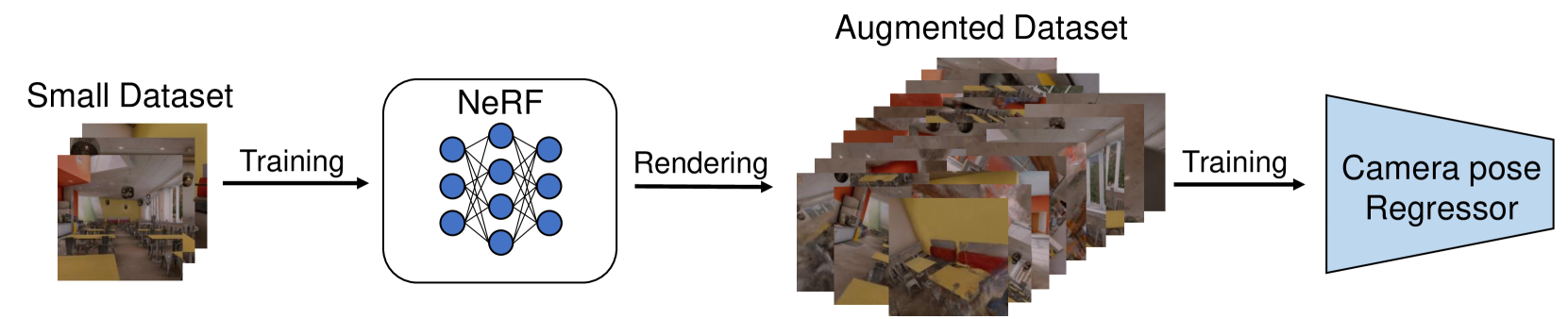
NVINS: Robust Visual Inertial Navigation Fused with NeRF-augmented Camera Pose Regressor and Uncertainty Quantification
Juyeop Han, Lukas Lao Beyer, Guilherme V. Cavalheiro, Sertac Karaman
In recent years, Neural Radiance Fields (NeRF) have emerged as a powerful tool for 3D reconstruction and novel view synthesis. However, the computational cost of NeRF rendering and degradation in quality due to the presence of artifacts pose significant challenges for its application in real-time and robust robotic tasks, especially on embedded systems. This paper introduces a novel framework that integrates NeRF-derived localization information with Visual-Inertial Odometry (VIO) to provide a robust solution for real-time robotic navigation. By training an absolute pose regression network with augmented image data rendered from a NeRF and quantifying its uncertainty, our approach effectively counters positional drift and enhances system reliability. We also establish a mathematically sound foundation for combining visual inertial navigation with camera localization neural networks, considering uncertainty under a Bayesian framework. Experimental validation in a photorealistic simulation environment demonstrates significant improvements in accuracy compared to a conventional VIO approach.
Read more8/20/2024

0
NeRF in Robotics: A Survey
Guangming Wang, Lei Pan, Songyou Peng, Shaohui Liu, Chenfeng Xu, Yanzi Miao, Wei Zhan, Masayoshi Tomizuka, Marc Pollefeys, Hesheng Wang
Meticulous 3D environment representations have been a longstanding goal in computer vision and robotics fields. The recent emergence of neural implicit representations has introduced radical innovation to this field as implicit representations enable numerous capabilities. Among these, the Neural Radiance Field (NeRF) has sparked a trend because of the huge representational advantages, such as simplified mathematical models, compact environment storage, and continuous scene representations. Apart from computer vision, NeRF has also shown tremendous potential in the field of robotics. Thus, we create this survey to provide a comprehensive understanding of NeRF in the field of robotics. By exploring the advantages and limitations of NeRF, as well as its current applications and future potential, we hope to shed light on this promising area of research. Our survey is divided into two main sections: textit{The Application of NeRF in Robotics} and textit{The Advance of NeRF in Robotics}, from the perspective of how NeRF enters the field of robotics. In the first section, we introduce and analyze some works that have been or could be used in the field of robotics from the perception and interaction perspectives. In the second section, we show some works related to improving NeRF's own properties, which are essential for deploying NeRF in the field of robotics. In the discussion section of the review, we summarize the existing challenges and provide some valuable future research directions for reference.
Read more5/3/2024