NIGHT -- Non-Line-of-Sight Imaging from Indirect Time of Flight Data

0
📊
Sign in to get full access
Overview
- Acquiring information about objects outside the line-of-sight of cameras is a challenging research area.
- Recent works have shown the feasibility of this using custom direct Time of Flight sensors.
- This paper tackles the problem using only data from an off-the-shelf indirect Time of Flight sensor, without any additional hardware.
- A Deep Learning model is introduced that can reframe the surfaces where light bounces as a virtual mirror, making the task easier to handle.
- A first-of-its-kind synthetic dataset is provided, and the feasibility of the proposed idea is demonstrated.
Plain English Explanation
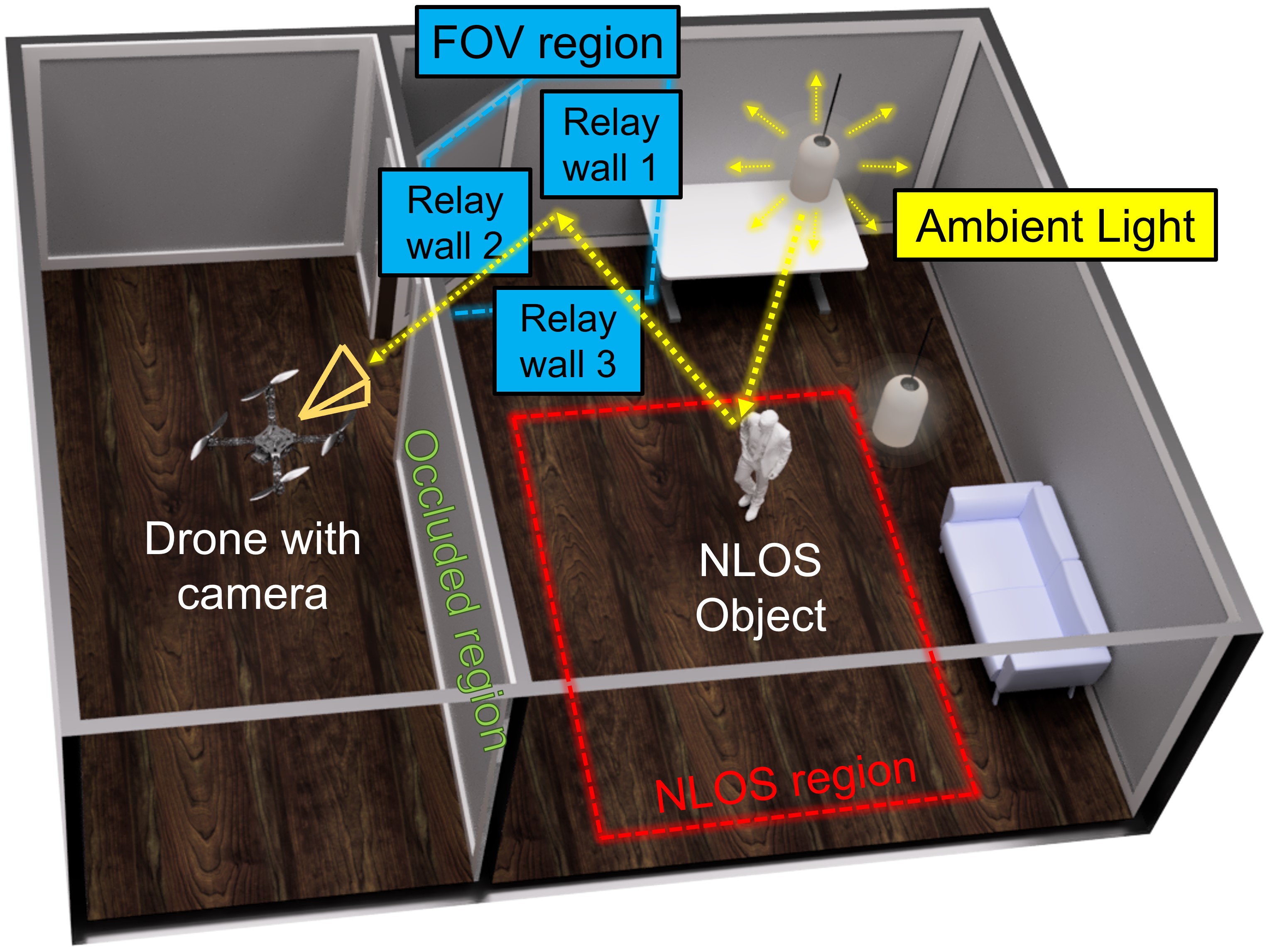
Cameras can only see what is directly in their line-of-sight. However, researchers have been exploring ways to obtain information about objects that are hidden from the camera's view. Recent research has shown that this is possible by using specialized sensors that measure the time it takes for light to bounce off surfaces and return to the sensor.
This paper takes a different approach, using only standard, off-the-shelf time-of-flight sensors, which are commonly found in many modern devices. The key insight is to model the hidden surfaces as a virtual mirror. This allows the researchers to reconstruct the depth information of the hidden scene from the sensor data, without needing any additional hardware.
To test this idea, the researchers also created a synthetic dataset, which can be used to train and evaluate machine learning models for this task. This is the first dataset of its kind, and it demonstrates the feasibility of the proposed approach.
Technical Explanation
The paper introduces a Deep Learning model that can reconstruct the depth information of objects hidden from the camera's line-of-sight. This is achieved by reframing the surfaces where light bounces as a virtual mirror.
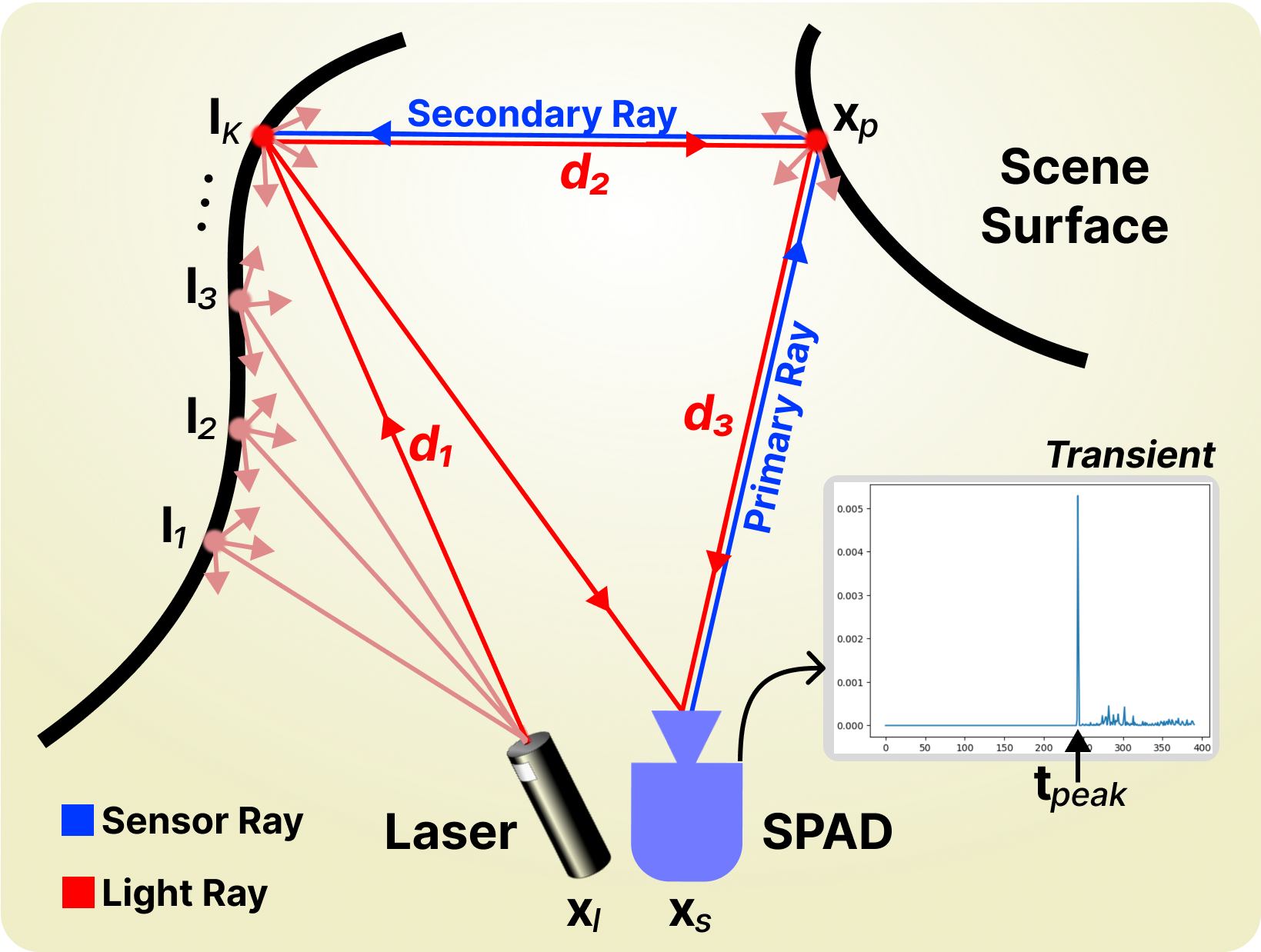
The model takes as input the data from an off-the-shelf indirect Time of Flight sensor, which measures the time it takes for light to reflect off surfaces and return to the sensor. By modeling the hidden surfaces as a virtual mirror, the task of reconstructing the depth information becomes more tractable.
The researchers also provide a first-of-its-kind synthetic dataset for this task, which can be used to train and evaluate machine learning models. Experiments on this dataset demonstrate the feasibility of the proposed approach, showing that it is possible to recover depth information about hidden scenes using only standard time-of-flight sensor data.
Critical Analysis
The paper presents a novel and promising approach to the challenge of acquiring information about objects outside the line-of-sight of cameras. By using only off-the-shelf time-of-flight sensors, the proposed method avoids the need for custom hardware, which could make it more accessible and practical for real-world applications.
However, the paper does not address the potential limitations or challenges of this approach. For example, the performance of the model may be sensitive to the quality and characteristics of the time-of-flight sensor data, and there may be practical constraints on the types of environments or scenarios where this method can be effectively applied.
Additionally, the authors do not provide a detailed analysis of the computational complexity or resource requirements of their Deep Learning model, which could be important considerations for real-world deployment.
Further research and experimentation, potentially with real-world datasets and a wider range of scenarios, would be helpful to better understand the limitations and potential of this approach.
Conclusion
This paper presents a novel approach to the challenge of acquiring information about objects outside the line-of-sight of cameras. By using only standard, off-the-shelf time-of-flight sensors and a Deep Learning model that reframes the hidden surfaces as a virtual mirror, the researchers have demonstrated the feasibility of this idea.
The provided synthetic dataset and the promising results on this dataset suggest that this approach could be a valuable tool for a variety of applications, such as enhanced night-time observations or improved UAV safety. Further research and real-world experimentation will be needed to fully understand the capabilities and limitations of this method, but this paper represents an exciting step forward in the field of non-line-of-sight imaging.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📊
0
NIGHT -- Non-Line-of-Sight Imaging from Indirect Time of Flight Data
Matteo Caligiuri, Adriano Simonetto, Pietro Zanuttigh
The acquisition of objects outside the Line-of-Sight of cameras is a very intriguing but also extremely challenging research topic. Recent works showed the feasibility of this idea exploiting transient imaging data produced by custom direct Time of Flight sensors. In this paper, for the first time, we tackle this problem using only data from an off-the-shelf indirect Time of Flight sensor without any further hardware requirement. We introduced a Deep Learning model able to re-frame the surfaces where light bounces happen as a virtual mirror. This modeling makes the task easier to handle and also facilitates the construction of annotated training data. From the obtained data it is possible to retrieve the depth information of the hidden scene. We also provide a first-in-its-kind synthetic dataset for the task and demonstrate the feasibility of the proposed idea over it.
Read more8/15/2024
📉
0
Ptychographic non-line-of-sight imaging for depth-resolved visualization of hidden objects
Pengming Song, Qianhao Zhao, Ruihai Wang, Ninghe Liu, Yingqi Qiang, Tianbo Wang, Xincheng Zhang, Yi Zhang, Guoan Zheng
Non-line-of-sight (NLOS) imaging enables the visualization of objects hidden from direct view, with applications in surveillance, remote sensing, and light detection and ranging. Here, we introduce a NLOS imaging technique termed ptychographic NLOS (pNLOS), which leverages coded ptychography for depth-resolved imaging of obscured objects. Our approach involves scanning a laser spot on a wall to illuminate the hidden objects in an obscured region. The reflected wavefields from these objects then travel back to the wall, get modulated by the wall's complex-valued profile, and the resulting diffraction patterns are captured by a camera. By modulating the object wavefields, the wall surface serves the role of the coded layer as in coded ptychography. As we scan the laser spot to different positions, the reflected object wavefields on the wall translate accordingly, with the shifts varying for objects at different depths. This translational diversity enables the acquisition of a set of modulated diffraction patterns referred to as a ptychogram. By processing the ptychogram, we recover both the objects at different depths and the modulation profile of the wall surface. Experimental results demonstrate high-resolution, high-fidelity imaging of hidden objects, showcasing the potential of pNLOS for depth-aware vision beyond the direct line of sight.
Read more9/4/2024
0
PathFinder: Attention-Driven Dynamic Non-Line-of-Sight Tracking with a Mobile Robot
Shenbagaraj Kannapiran, Sreenithy Chandran, Suren Jayasuriya, Spring Berman
The study of non-line-of-sight (NLOS) imaging is growing due to its many potential applications, including rescue operations and pedestrian detection by self-driving cars. However, implementing NLOS imaging on a moving camera remains an open area of research. Existing NLOS imaging methods rely on time-resolved detectors and laser configurations that require precise optical alignment, making it difficult to deploy them in dynamic environments. This work proposes a data-driven approach to NLOS imaging, PathFinder, that can be used with a standard RGB camera mounted on a small, power-constrained mobile robot, such as an aerial drone. Our experimental pipeline is designed to accurately estimate the 2D trajectory of a person who moves in a Manhattan-world environment while remaining hidden from the camera's field-of-view. We introduce a novel approach to process a sequence of dynamic successive frames in a line-of-sight (LOS) video using an attention-based neural network that performs inference in real-time. The method also includes a preprocessing selection metric that analyzes images from a moving camera which contain multiple vertical planar surfaces, such as walls and building facades, and extracts planes that return maximum NLOS information. We validate the approach on in-the-wild scenes using a drone for video capture, thus demonstrating low-cost NLOS imaging in dynamic capture environments.
Read more4/9/2024
0
PlatoNeRF: 3D Reconstruction in Plato's Cave via Single-View Two-Bounce Lidar
Tzofi Klinghoffer, Xiaoyu Xiang, Siddharth Somasundaram, Yuchen Fan, Christian Richardt, Ramesh Raskar, Rakesh Ranjan
3D reconstruction from a single-view is challenging because of the ambiguity from monocular cues and lack of information about occluded regions. Neural radiance fields (NeRF), while popular for view synthesis and 3D reconstruction, are typically reliant on multi-view images. Existing methods for single-view 3D reconstruction with NeRF rely on either data priors to hallucinate views of occluded regions, which may not be physically accurate, or shadows observed by RGB cameras, which are difficult to detect in ambient light and low albedo backgrounds. We propose using time-of-flight data captured by a single-photon avalanche diode to overcome these limitations. Our method models two-bounce optical paths with NeRF, using lidar transient data for supervision. By leveraging the advantages of both NeRF and two-bounce light measured by lidar, we demonstrate that we can reconstruct visible and occluded geometry without data priors or reliance on controlled ambient lighting or scene albedo. In addition, we demonstrate improved generalization under practical constraints on sensor spatial- and temporal-resolution. We believe our method is a promising direction as single-photon lidars become ubiquitous on consumer devices, such as phones, tablets, and headsets.
Read more4/8/2024