Offline Reinforcement Learning with Imputed Rewards

0

Sign in to get full access
Overview
• The paper presents a novel approach to offline reinforcement learning (RL) called "Imputed Rewards" that addresses the challenge of learning from limited and potentially biased offline data.
• The method involves imputing (estimating) rewards for unlabeled state-action pairs in the offline dataset, which helps the RL agent learn more effectively without access to the full reward information.
• The technique is evaluated on several benchmark environments, including a racing game environment, demonstrating improved performance compared to existing offline RL methods.
Plain English Explanation
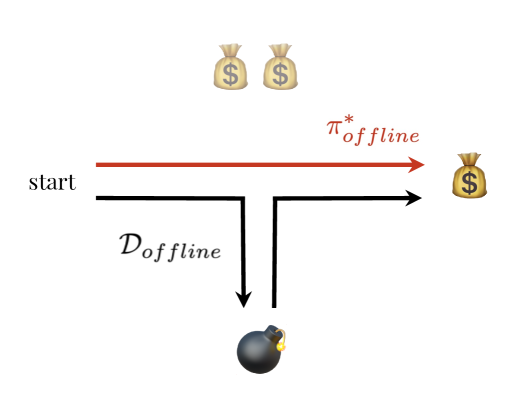
In the world of reinforcement learning (RL), agents are trained to make decisions by interacting with their environment and receiving rewards or penalties. However, in many real-world scenarios, it's not always possible for the agent to have direct access to the full reward information. This is where the concept of "offline RL" comes into play.
Offline RL refers to the setting where the agent has to learn from a pre-existing dataset of past experiences, without the ability to actively interact with the environment. This can be challenging because the dataset may be limited or biased, lacking the complete reward information that the agent needs to learn effectively.
The "Imputed Rewards" approach presented in this paper aims to address this challenge. The key idea is to estimate or "impute" the missing reward information for the unlabeled state-action pairs in the offline dataset. By filling in these gaps, the RL agent can learn a more accurate model of the environment and make better decisions, even with limited data.
The researchers evaluate this method on several benchmark environments, including a racing game, and find that it outperforms existing offline RL techniques. This is an important step forward in making RL more practical and applicable in real-world scenarios where direct interaction with the environment may not be possible.
Technical Explanation
The paper introduces a novel offline RL algorithm called "Imputed Rewards" that addresses the problem of learning from limited and potentially biased offline data. The key idea is to impute (estimate) the missing reward information for unlabeled state-action pairs in the offline dataset, which helps the RL agent learn a more accurate model of the environment.
The authors first formulate the offline RL problem and discuss the challenges of learning from limited data, including the potential for distribution shift and missing reward information. They then present the Imputed Rewards algorithm, which consists of two main components:
-
Reward Imputation: The method uses a neural network to predict the missing reward values for unlabeled state-action pairs in the offline dataset. This is done by leveraging the available reward information and the structure of the dataset.
-
Offline RL Optimization: The imputed rewards are then used to train the RL agent using a variant of the Batch Constrained Q-Learning (BCQ) algorithm. This allows the agent to learn an effective policy from the augmented dataset.
The authors evaluate the Imputed Rewards approach on several benchmark environments, including a racing game environment, preference elicitation tasks, offline inverse RL, and hybrid RL from offline observation alone. The results show that the Imputed Rewards method outperforms existing offline RL techniques, particularly in settings with limited and biased data.
Critical Analysis
The Imputed Rewards approach presented in this paper is a promising step towards making offline RL more practical and effective. By addressing the challenge of missing reward information, the method can be applied to a wider range of real-world scenarios where direct interaction with the environment is not feasible.
However, the paper also acknowledges several limitations and areas for further research. For instance, the reward imputation model relies on the availability of some labeled reward data, which may not always be the case in practice. Additionally, the method assumes that the offline dataset is representative of the true underlying distribution, which may not always hold true.
Another potential issue is the reliability of the imputed rewards. While the authors demonstrate the effectiveness of their approach, there may be cases where the imputed rewards are inaccurate or biased, leading to suboptimal learning by the RL agent. Further investigation into the robustness and uncertainty of the imputed rewards could be valuable.
The paper also does not explore the potential implications of using offline RL in a continual learning setting, where the agent needs to adapt to changing environments and tasks over time. Extending the Imputed Rewards approach to such scenarios could be an interesting area for future research.
Conclusion
The "Imputed Rewards" approach presented in this paper is a significant contribution to the field of offline reinforcement learning. By addressing the challenge of missing reward information, the method enables RL agents to learn more effectively from limited and potentially biased offline data.
The evaluation results demonstrate the effectiveness of this approach, particularly in benchmark environments with restricted data availability. While the paper acknowledges some limitations and areas for further research, the Imputed Rewards algorithm represents an important step forward in making RL more practical and applicable in real-world scenarios where direct interaction with the environment is not possible.
Overall, this work highlights the importance of developing robust and flexible offline RL techniques to expand the reach and impact of reinforcement learning in various domains.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Offline Reinforcement Learning with Imputed Rewards
Carlo Romeo, Andrew D. Bagdanov
Offline Reinforcement Learning (ORL) offers a robust solution to training agents in applications where interactions with the environment must be strictly limited due to cost, safety, or lack of accurate simulation environments. Despite its potential to facilitate deployment of artificial agents in the real world, Offline Reinforcement Learning typically requires very many demonstrations annotated with ground-truth rewards. Consequently, state-of-the-art ORL algorithms can be difficult or impossible to apply in data-scarce scenarios. In this paper we propose a simple but effective Reward Model that can estimate the reward signal from a very limited sample of environment transitions annotated with rewards. Once the reward signal is modeled, we use the Reward Model to impute rewards for a large sample of reward-free transitions, thus enabling the application of ORL techniques. We demonstrate the potential of our approach on several D4RL continuous locomotion tasks. Our results show that, using only 1% of reward-labeled transitions from the original datasets, our learned reward model is able to impute rewards for the remaining 99% of the transitions, from which performant agents can be learned using Offline Reinforcement Learning.
Read more7/16/2024
0
Preference Elicitation for Offline Reinforcement Learning
Aliz'ee Pace, Bernhard Scholkopf, Gunnar Ratsch, Giorgia Ramponi
Applying reinforcement learning (RL) to real-world problems is often made challenging by the inability to interact with the environment and the difficulty of designing reward functions. Offline RL addresses the first challenge by considering access to an offline dataset of environment interactions labeled by the reward function. In contrast, Preference-based RL does not assume access to the reward function and learns it from preferences, but typically requires an online interaction with the environment. We bridge the gap between these frameworks by exploring efficient methods for acquiring preference feedback in a fully offline setup. We propose Sim-OPRL, an offline preference-based reinforcement learning algorithm, which leverages a learned environment model to elicit preference feedback on simulated rollouts. Drawing on insights from both the offline RL and the preference-based RL literature, our algorithm employs a pessimistic approach for out-of-distribution data, and an optimistic approach for acquiring informative preferences about the optimal policy. We provide theoretical guarantees regarding the sample complexity of our approach, dependent on how well the offline data covers the optimal policy. Finally, we demonstrate the empirical performance of Sim-OPRL in different environments.
Read more6/27/2024

0
A Benchmark Environment for Offline Reinforcement Learning in Racing Games
Girolamo Macaluso, Alessandro Sestini, Andrew D. Bagdanov
Offline Reinforcement Learning (ORL) is a promising approach to reduce the high sample complexity of traditional Reinforcement Learning (RL) by eliminating the need for continuous environmental interactions. ORL exploits a dataset of pre-collected transitions and thus expands the range of application of RL to tasks in which the excessive environment queries increase training time and decrease efficiency, such as in modern AAA games. This paper introduces OfflineMania a novel environment for ORL research. It is inspired by the iconic TrackMania series and developed using the Unity 3D game engine. The environment simulates a single-agent racing game in which the objective is to complete the track through optimal navigation. We provide a variety of datasets to assess ORL performance. These datasets, created from policies of varying ability and in different sizes, aim to offer a challenging testbed for algorithm development and evaluation. We further establish a set of baselines for a range of Online RL, ORL, and hybrid Offline to Online RL approaches using our environment.
Read more7/15/2024
👁️
0
Offline Inverse RL: New Solution Concepts and Provably Efficient Algorithms
Filippo Lazzati, Mirco Mutti, Alberto Maria Metelli
Inverse reinforcement learning (IRL) aims to recover the reward function of an expert agent from demonstrations of behavior. It is well-known that the IRL problem is fundamentally ill-posed, i.e., many reward functions can explain the demonstrations. For this reason, IRL has been recently reframed in terms of estimating the feasible reward set (Metelli et al., 2021), thus, postponing the selection of a single reward. However, so far, the available formulations and algorithmic solutions have been proposed and analyzed mainly for the online setting, where the learner can interact with the environment and query the expert at will. This is clearly unrealistic in most practical applications, where the availability of an offline dataset is a much more common scenario. In this paper, we introduce a novel notion of feasible reward set capturing the opportunities and limitations of the offline setting and we analyze the complexity of its estimation. This requires the introduction an original learning framework that copes with the intrinsic difficulty of the setting, for which the data coverage is not under control. Then, we propose two computationally and statistically efficient algorithms, IRLO and PIRLO, for addressing the problem. In particular, the latter adopts a specific form of pessimism to enforce the novel desirable property of inclusion monotonicity of the delivered feasible set. With this work, we aim to provide a panorama of the challenges of the offline IRL problem and how they can be fruitfully addressed.
Read more6/7/2024