OER: Offline Experience Replay for Continual Offline Reinforcement Learning
2305.13804
0
0
🏅
Abstract
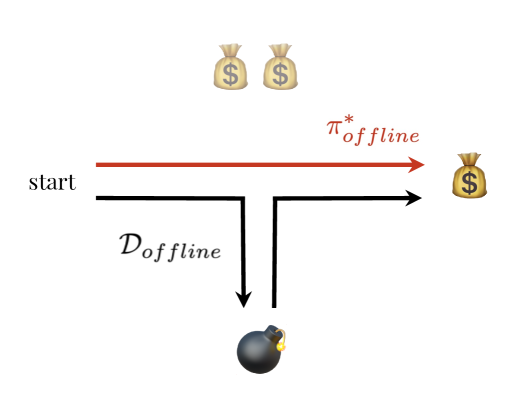
The capability of continuously learning new skills via a sequence of pre-collected offline datasets is desired for an agent. However, consecutively learning a sequence of offline tasks likely leads to the catastrophic forgetting issue under resource-limited scenarios. In this paper, we formulate a new setting, continual offline reinforcement learning (CORL), where an agent learns a sequence of offline reinforcement learning tasks and pursues good performance on all learned tasks with a small replay buffer without exploring any of the environments of all the sequential tasks. For consistently learning on all sequential tasks, an agent requires acquiring new knowledge and meanwhile preserving old knowledge in an offline manner. To this end, we introduced continual learning algorithms and experimentally found experience replay (ER) to be the most suitable algorithm for the CORL problem. However, we observe that introducing ER into CORL encounters a new distribution shift problem: the mismatch between the experiences in the replay buffer and trajectories from the learned policy. To address such an issue, we propose a new model-based experience selection (MBES) scheme to build the replay buffer, where a transition model is learned to approximate the state distribution. This model is used to bridge the distribution bias between the replay buffer and the learned model by filtering the data from offline data that most closely resembles the learned model for storage. Moreover, in order to enhance the ability on learning new tasks, we retrofit the experience replay method with a new dual behavior cloning (DBC) architecture to avoid the disturbance of behavior-cloning loss on the Q-learning process. In general, we call our algorithm offline experience replay (OER). Extensive experiments demonstrate that our OER method outperforms SOTA baselines in widely-used Mujoco environments.
Create account to get full access
Overview
- This paper introduces a new setting called "Continual Offline Reinforcement Learning" (CORL), where an agent learns a sequence of offline reinforcement learning tasks and aims to perform well on all learned tasks with a small replay buffer, without exploring any of the environments.
- The key challenge in CORL is to acquire new knowledge while preserving old knowledge in an offline manner, as consecutively learning a sequence of offline tasks can lead to catastrophic forgetting.
- The authors introduce a new algorithm called "Offline Experience Replay" (OER) to address the CORL problem, which includes a model-based experience selection scheme and a dual behavior cloning architecture.
Plain English Explanation
The paper proposes a new way for an AI agent to continuously learn new skills by training on a sequence of pre-collected datasets, without actually interacting with the real environments. This is known as Continual Offline Reinforcement Learning (CORL).
The challenge is that as the agent learns new skills, it tends to forget the old ones, a problem known as "catastrophic forgetting." To address this, the researchers developed a new algorithm called Offline Experience Replay (OER), which helps the agent acquire new knowledge while preserving the old.
The key ideas behind OER are:
-
Model-Based Experience Selection: The agent learns a transition model to estimate the state distribution of the learned policy. This model is used to select experiences from the offline data that are most similar to the learned policy, helping to bridge the distribution gap.
-
Dual Behavior Cloning: OER combines Q-learning (for learning new tasks) with a new dual behavior cloning architecture. This helps avoid interference between the behavior cloning loss and the Q-learning process, further improving the agent's ability to learn new tasks.
By using these techniques, the OER algorithm is able to outperform state-of-the-art methods on a variety of MuJoCo environments.
Technical Explanation
The paper introduces the Continual Offline Reinforcement Learning (CORL) setting, where an agent must learn a sequence of offline RL tasks and maintain good performance on all learned tasks using a small replay buffer, without interacting with the real environments.
To address the catastrophic forgetting issue in this setting, the authors propose a new algorithm called Offline Experience Replay (OER). OER consists of two key components:
-
Model-Based Experience Selection (MBES): The agent learns a transition model to approximate the state distribution of the learned policy. This model is used to filter the offline data, selecting experiences that are most similar to the learned policy. This helps bridge the distribution gap between the replay buffer and the learned model.
-
Dual Behavior Cloning (DBC): OER combines Q-learning with a new dual behavior cloning architecture. This architecture uses two behavior cloning heads, one for the current task and one for all previous tasks. This helps avoid interference between the behavior cloning loss and the Q-learning process, improving the agent's ability to learn new tasks.
The authors evaluate OER on a range of MuJoCo environments and show that it outperforms state-of-the-art continual learning and offline RL baselines.
Critical Analysis
The paper introduces an important new problem setting, CORL, and proposes a novel algorithm, OER, to address it. The key strengths of the paper are the clear problem formulation, the well-designed algorithm components, and the thorough experimental evaluation.
However, the paper also has some limitations. Firstly, the authors only evaluate OER on MuJoCo environments, which may not fully represent the diversity of real-world continual learning tasks. Extending the evaluation to more challenging domains would be valuable.
Secondly, the paper does not provide a deeper analysis of the trade-offs between the different components of OER (MBES and DBC). Understanding the individual contributions of these components and how they interact would enhance the interpretability of the algorithm.
Finally, the paper does not discuss potential negative societal impacts of the proposed approach, such as issues around data privacy or algorithmic bias. Considering these factors is important as the field of continual learning matures.
Overall, this paper makes a valuable contribution to the continual offline reinforcement learning literature and provides a strong foundation for future research in this area.
Conclusion
This paper introduces a new problem setting called Continual Offline Reinforcement Learning (CORL) and proposes a novel algorithm, Offline Experience Replay (OER), to address the key challenge of catastrophic forgetting in this setting. OER uses a model-based experience selection scheme and a dual behavior cloning architecture to help the agent acquire new knowledge while preserving old knowledge, without interacting with the real environments.
The authors demonstrate the effectiveness of OER on a range of MuJoCo environments, where it outperforms state-of-the-art baselines. This work represents an important step forward in the field of continual learning and offline reinforcement learning, with potential applications in areas where an agent needs to continuously learn new skills from pre-collected data.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Single-Task Continual Offline Reinforcement Learning
Sibo Gai, Donglin Wang
0
0
In this paper, we study the continual learning problem of single-task offline reinforcement learning. In the past, continual reinforcement learning usually only dealt with multitasking, that is, learning multiple related or unrelated tasks in a row, but once each learned task was learned, it was not relearned, but only used in subsequent processes. However, offline reinforcement learning tasks require the continuously learning of multiple different datasets for the same task. Existing algorithms will try their best to achieve the best results in each offline dataset they have learned and the skills of the network will overwrite the high-quality datasets that have been learned after learning the subsequent poor datasets. On the other hand, if too much emphasis is placed on stability, the network will learn the subsequent better dataset after learning the poor offline dataset, and the problem of insufficient plasticity and non-learning will occur. How to design a strategy that can always preserve the best performance for each state in the data that has been learned is a new challenge and the focus of this study. Therefore, this study proposes a new algorithm, called Ensemble Offline Reinforcement Learning Based on Experience Replay, which introduces multiple value networks to learn the same dataset and judge whether the strategy has been learned by the discrete degree of the value network, to improve the performance of the network in single-task offline reinforcement learning.
5/6/2024
🏅
Solving Continual Offline Reinforcement Learning with Decision Transformer
Kaixin Huang, Li Shen, Chen Zhao, Chun Yuan, Dacheng Tao
0
0
Continuous offline reinforcement learning (CORL) combines continuous and offline reinforcement learning, enabling agents to learn multiple tasks from static datasets without forgetting prior tasks. However, CORL faces challenges in balancing stability and plasticity. Existing methods, employing Actor-Critic structures and experience replay (ER), suffer from distribution shifts, low efficiency, and weak knowledge-sharing. We aim to investigate whether Decision Transformer (DT), another offline RL paradigm, can serve as a more suitable offline continuous learner to address these issues. We first compare AC-based offline algorithms with DT in the CORL framework. DT offers advantages in learning efficiency, distribution shift mitigation, and zero-shot generalization but exacerbates the forgetting problem during supervised parameter updates. We introduce multi-head DT (MH-DT) and low-rank adaptation DT (LoRA-DT) to mitigate DT's forgetting problem. MH-DT stores task-specific knowledge using multiple heads, facilitating knowledge sharing with common components. It employs distillation and selective rehearsal to enhance current task learning when a replay buffer is available. In buffer-unavailable scenarios, LoRA-DT merges less influential weights and fine-tunes DT's decisive MLP layer to adapt to the current task. Extensive experiments on MoJuCo and Meta-World benchmarks demonstrate that our methods outperform SOTA CORL baselines and showcase enhanced learning capabilities and superior memory efficiency.
4/9/2024

Continual Offline Reinforcement Learning via Diffusion-based Dual Generative Replay
Jinmei Liu, Wenbin Li, Xiangyu Yue, Shilin Zhang, Chunlin Chen, Zhi Wang
0
0
We study continual offline reinforcement learning, a practical paradigm that facilitates forward transfer and mitigates catastrophic forgetting to tackle sequential offline tasks. We propose a dual generative replay framework that retains previous knowledge by concurrent replay of generated pseudo-data. First, we decouple the continual learning policy into a diffusion-based generative behavior model and a multi-head action evaluation model, allowing the policy to inherit distributional expressivity for encompassing a progressive range of diverse behaviors. Second, we train a task-conditioned diffusion model to mimic state distributions of past tasks. Generated states are paired with corresponding responses from the behavior generator to represent old tasks with high-fidelity replayed samples. Finally, by interleaving pseudo samples with real ones of the new task, we continually update the state and behavior generators to model progressively diverse behaviors, and regularize the multi-head critic via behavior cloning to mitigate forgetting. Experiments demonstrate that our method achieves better forward transfer with less forgetting, and closely approximates the results of using previous ground-truth data due to its high-fidelity replay of the sample space. Our code is available at href{https://github.com/NJU-RL/CuGRO}{https://github.com/NJU-RL/CuGRO}.
4/19/2024
Preference Elicitation for Offline Reinforcement Learning
Aliz'ee Pace, Bernhard Scholkopf, Gunnar Ratsch, Giorgia Ramponi
0
0
Applying reinforcement learning (RL) to real-world problems is often made challenging by the inability to interact with the environment and the difficulty of designing reward functions. Offline RL addresses the first challenge by considering access to an offline dataset of environment interactions labeled by the reward function. In contrast, Preference-based RL does not assume access to the reward function and learns it from preferences, but typically requires an online interaction with the environment. We bridge the gap between these frameworks by exploring efficient methods for acquiring preference feedback in a fully offline setup. We propose Sim-OPRL, an offline preference-based reinforcement learning algorithm, which leverages a learned environment model to elicit preference feedback on simulated rollouts. Drawing on insights from both the offline RL and the preference-based RL literature, our algorithm employs a pessimistic approach for out-of-distribution data, and an optimistic approach for acquiring informative preferences about the optimal policy. We provide theoretical guarantees regarding the sample complexity of our approach, dependent on how well the offline data covers the optimal policy. Finally, we demonstrate the empirical performance of Sim-OPRL in different environments.
6/27/2024