Offline robot programming assisted by task demonstration: an AutomationML interoperable solution for glass adhesive application and welding

0
🗣️
Sign in to get full access
Overview
- This paper introduces a new robot programming system that aims to make it easier for non-experts to program robots for manufacturing tasks.
- The system captures manufacturing skills from task demonstrations performed by skilled workers and uses this information to generate robot programs.
- The researchers demonstrate the system's effectiveness in two manufacturing processes: glass adhesive application and welding.
Plain English Explanation
The researchers have developed a new way to program robots for manufacturing tasks that is more intuitive and accessible to non-experts. Typically, programming robots requires expertise in both robotics and the specific manufacturing process, which limits their use to a wider range of potential users.
This new system works by capturing the manufacturing skills of skilled workers as they demonstrate a task. It uses a magnetic tracking system like the one described in this paper to record the orientation and velocity of the worker's movements, as well as positional data from CAD/CAM software.
The system then translates this data into robot-friendly instructions, including the correct robot poses, orientations, and velocities needed to perform the task. This integrated approach to capturing both robot and manufacturing data is similar to the SmartFlow system.
The researchers tested the system on two common manufacturing processes - glass adhesive application and welding - and found that the robot paths generated were within the functional tolerance range, meaning the robot could perform the tasks accurately.
Technical Explanation
The key innovation of this work is the development of an intuitive robot programming system that can capture relevant manufacturing skills from task demonstrations by skilled workers. This is in contrast to traditional offline robot programming, where the programs often lack critical parameters like robot orientation and velocity that are necessary for executing specific manufacturing tasks.
The system uses a magnetic tracking system to record the orientation and velocity of the worker's movements during a demonstration, while positional data is extracted from CAD/CAM software. This data is then transformed into robot-friendly Cartesian space and validated in simulation before being used to generate the final robot program.
The researchers developed a new syntax called PathML, which is based on the AutomationML standard, to integrate the robot and manufacturing data across the different elements and stages of the manufacturing system. This allows for a more cohesive and transferable representation of the required skills.
The effectiveness of the system was demonstrated through experiments on two common manufacturing processes: glass adhesive application and welding. The results showed that the robot paths generated by the system were within the functional tolerance range, indicating that the robots could accurately perform the tasks.
Critical Analysis
The paper provides a promising approach to making robot programming more accessible to non-experts, but there are a few potential limitations and areas for further research:
-
The system relies on skilled workers to provide the initial task demonstrations, which may not always be available or practical. Exploring ways to generate these demonstrations automatically or semi-automatically could further improve the system's accessibility.
-
The experiments were conducted on relatively simple manufacturing tasks, and it's unclear how well the system would scale to more complex processes. Further testing and evaluation on a wider range of manufacturing applications would be valuable.
-
The paper does not address the potential for errors or inconsistencies in the worker's demonstrations, and how the system might handle or mitigate these issues. Exploring robust techniques for handling variability in the demonstration data could enhance the system's reliability.
Overall, the research demonstrates a promising approach to making robot programming more accessible, but additional work may be needed to fully realize its potential and address some of the identified limitations.
Conclusion
This paper presents an innovative robot programming system that aims to make it easier for non-experts to program robots for manufacturing tasks. By capturing the manufacturing skills of skilled workers through task demonstrations, the system can generate robot programs that accurately execute the required motions and processes.
The experiments conducted on glass adhesive application and welding processes showed promising results, with the robot paths generated by the system falling within the functional tolerance range. This suggests that the system could be a valuable tool for expanding the accessibility of robotics in manufacturing, potentially opening up new opportunities for automation and improving productivity.
Further research is needed to address some of the identified limitations, such as the reliance on skilled worker demonstrations and the need for more extensive testing on complex manufacturing tasks. However, the core ideas presented in this work represent an important step forward in making robot programming more intuitive and accessible to a wider range of users.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🗣️
0
Offline robot programming assisted by task demonstration: an AutomationML interoperable solution for glass adhesive application and welding
M. Babcinschi, F. Cruz, N. Duarte, S. Santos, S. Alves, P. Neto
Robots have been successfully deployed in both traditional and novel manufacturing processes. However, they are still difficult to program by non-experts, which limits their accessibility to a wider range of potential users. Programming robots requires expertise in both robotics and the specific manufacturing process in which they are applied. Robot programs created offline often lack parameters that represent relevant manufacturing skills when executing a specific task. These skills encompass aspects like robot orientation and velocity. This paper introduces an intuitive robot programming system designed to capture manufacturing skills from task demonstrations performed by skilled workers. Demonstration data, including orientations and velocities of the working paths, are acquired using a magnetic tracking system fixed to the tools used by the worker. Positional data are extracted from CAD/CAM. Robot path poses are transformed into Cartesian space and validated in simulation, subsequently leading to the generation of robot programs. PathML, an AutomationML-based syntax, integrates robot and manufacturing data across the heterogeneous elements and stages of the manufacturing systems considered. Experiments conducted on the glass adhesive application and welding processes showcased the intuitive nature of the system, with path errors falling within the functional tolerance range.
Read more5/24/2024
↗️
0
Programming of Skill-based Robots
Taneli Lohi, Samuli Soutukorva, Tapio Heikkila
Manufacturing is facing ever changing market demands, with faster innovation cycles resulting to growing agility and flexibility requirements. Industry 4.0 has been transforming the manufacturing world towards digital automation and the importance of software has increased drastically. Easy and fast task programming and execution in robot - sensor systems become a prerequisite for agile and flexible automation and in this paper, we propose such a system. Our solution relies on a robot skill library, which provides the user with high level and parametrized operations, i.e., robot skills, for task programming and execution. Programming actions results to a control recipe in a neutral product context and is based on use of product CAD models or alternatively collaborative use of pointers and tracking sensor with real parts. Practical tests are also reported to show the feasibility of our approach.
Read more9/26/2024
0
Toward Automated Programming for Robotic Assembly Using ChatGPT
Annabella Macaluso, Nicholas Cote, Sachin Chitta
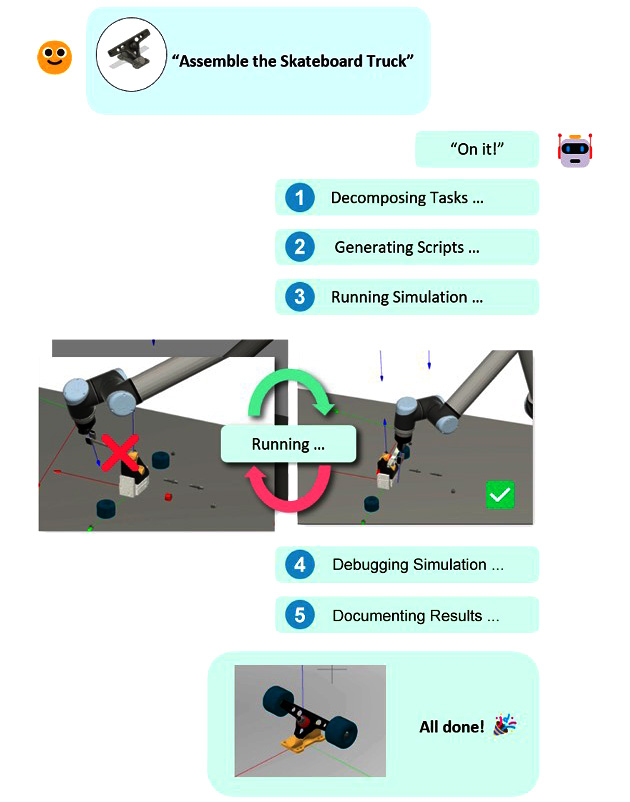
Despite significant technological advancements, the process of programming robots for adaptive assembly remains labor-intensive, demanding expertise in multiple domains and often resulting in task-specific, inflexible code. This work explores the potential of Large Language Models (LLMs), like ChatGPT, to automate this process, leveraging their ability to understand natural language instructions, generalize examples to new tasks, and write code. In this paper, we suggest how these abilities can be harnessed and applied to real-world challenges in the manufacturing industry. We present a novel system that uses ChatGPT to automate the process of programming robots for adaptive assembly by decomposing complex tasks into simpler subtasks, generating robot control code, executing the code in a simulated workcell, and debugging syntax and control errors, such as collisions. We outline the architecture of this system and strategies for task decomposition and code generation. Finally, we demonstrate how our system can autonomously program robots for various assembly tasks in a real-world project.
Read more5/15/2024

0
Enabling Waypoint Generation for Collaborative Robots using LLMs and Mixed Reality
Cathy Mengying Fang, Krzysztof Zieli'nski, Pattie Maes, Joe Paradiso, Bruce Blumberg, Mikkel Baun Kj{ae}rgaard
Programming a robotic is a complex task, as it demands the user to have a good command of specific programming languages and awareness of the robot's physical constraints. We propose a framework that simplifies robot deployment by allowing direct communication using natural language. It uses large language models (LLM) for prompt processing, workspace understanding, and waypoint generation. It also employs Augmented Reality (AR) to provide visual feedback of the planned outcome. We showcase the effectiveness of our framework with a simple pick-and-place task, which we implement on a real robot. Moreover, we present an early concept of expressive robot behavior and skill generation that can be used to communicate with the user and learn new skills (e.g., object grasping).
Read more7/18/2024