Optimal Planning for Timed Partial Order Specifications
2405.00687
0
0
📊
Abstract
This paper addresses the challenge of planning a sequence of tasks to be performed by multiple robots while minimizing the overall completion time subject to timing and precedence constraints. Our approach uses the Timed Partial Orders (TPO) model to specify these constraints. We translate this problem into a Traveling Salesman Problem (TSP) variant with timing and precedent constraints, and we solve it as a Mixed Integer Linear Programming (MILP) problem. Our contributions include a general planning framework for TPO specifications, a MILP formulation accommodating time windows and precedent constraints, its extension to multi-robot scenarios, and a method to quantify plan robustness. We demonstrate our framework on several case studies, including an aircraft turnaround task involving three Jackal robots, highlighting the approach's potential applicability to important real-world problems. Our benchmark results show that our MILP method outperforms state-of-the-art open-source TSP solvers OR-Tools.
Create account to get full access
Overview
- This paper addresses the challenge of planning a sequence of tasks for multiple robots while minimizing the overall completion time, subject to timing and precedence constraints.
- The approach uses the Timed Partial Orders (TPO) model to specify these constraints and translates the problem into a Traveling Salesman Problem (TSP) variant with timing and precedent constraints.
- The problem is solved as a Mixed Integer Linear Programming (MILP) problem, with contributions including a general planning framework for TPO specifications, a MILP formulation accommodating time windows and precedent constraints, an extension to multi-robot scenarios, and a method to quantify plan robustness.
- The framework is demonstrated on several case studies, including an aircraft turnaround task involving three Jackal robots, and benchmark results show that the MILP method outperforms state-of-the-art open-source TSP solvers.
Plain English Explanation
In this paper, the researchers address the challenge of planning a sequence of tasks for multiple robots to complete while minimizing the overall time it takes to finish all the tasks. The key constraints they need to consider are the timing and order in which the tasks must be performed.
To tackle this problem, the researchers use a model called Timed Partial Orders (TPO) to specify the timing and precedence constraints. They then translate the problem into a variation of the Traveling Salesman Problem (TSP), where the robots need to visit all the task locations while respecting the timing and order requirements. This TSP variant is then solved using a Mixed Integer Linear Programming (MILP) approach.
The main contributions of the paper include:
- A general planning framework for working with TPO specifications
- A MILP formulation that accommodates time windows and precedence constraints
- An extension of the approach to handle multiple robots
- A method to measure the robustness of the plans
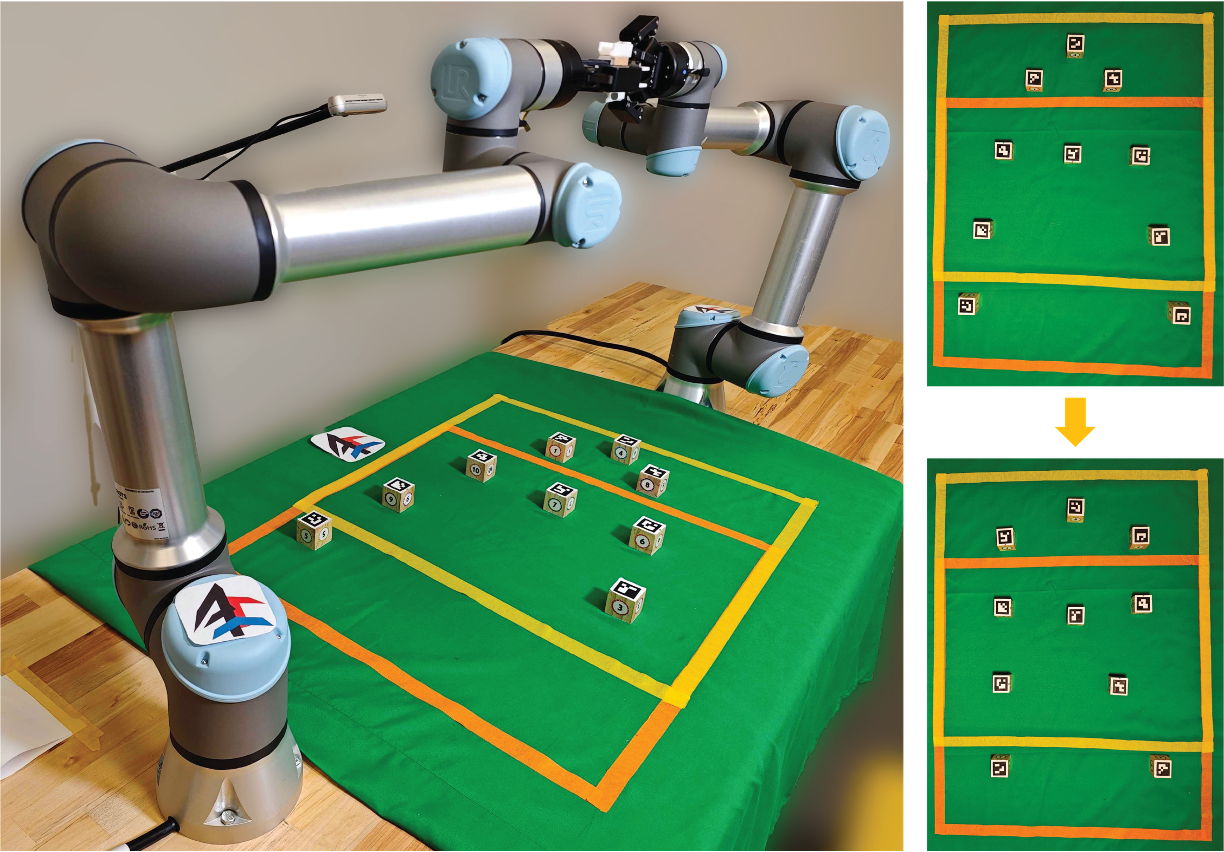
The researchers demonstrate their framework on several case studies, including an aircraft turnaround task involving three robot "Jackal" vehicles. They also show that their MILP-based approach outperforms state-of-the-art open-source TSP solvers.
Technical Explanation
The researchers use the Timed Partial Orders (TPO) model to specify the timing and precedence constraints for the task planning problem. This allows them to capture the dependencies between tasks and the time windows in which they must be executed.
They then translate the TPO-based task planning problem into a Traveling Salesman Problem (TSP) variant with timing and precedence constraints. This TSP variant is formulated as a Mixed Integer Linear Programming (MILP) problem, which they solve to find the optimal sequence of tasks for the robots to perform.
The key elements of the technical approach include:
- A general planning framework for working with TPO specifications
- A MILP formulation that accommodates time windows and precedence constraints
- An extension of the approach to handle multiple robots, where each robot is assigned a subset of the tasks
- A method to quantify the robustness of the generated plans, which is important for real-world applications
The researchers evaluate their framework on several case studies, including an aircraft turnaround task involving three Jackal robots. They also compare the performance of their MILP-based approach to state-of-the-art open-source TSP solvers, and their results show that the MILP method outperforms the alternatives.
Critical Analysis
The paper presents a comprehensive and promising approach to solving the multi-robot task planning problem with timing and precedence constraints. The use of the TPO model and the translation to a TSP variant with MILP formulation is a clever way to tackle this challenging optimization problem.
One potential limitation of the approach is the scalability of the MILP solver, as the problem complexity is likely to increase significantly as the number of robots and tasks grows. The researchers mention that they plan to explore hierarchical and decomposition-based methods to address this issue, which could be an important area for future research.
Additionally, the paper does not discuss the sensitivity of the approach to uncertainties in the task durations or robot capabilities. Developing methods to generate robust plans that can handle these types of uncertainties would be valuable for real-world applications, such as the aircraft turnaround scenario.
Another area for further investigation could be the integration of time-optimal trajectory planning techniques to refine the robot motions and further optimize the overall task completion time.
Overall, the research presented in this paper represents a significant contribution to the field of multi-robot task planning and coordination, and the proposed framework has the potential to be a valuable tool for a wide range of real-world applications.
Conclusion
This paper addresses the important challenge of planning a sequence of tasks for multiple robots while minimizing the overall completion time, subject to timing and precedence constraints. The researchers' approach leverages the Timed Partial Orders (TPO) model to specify the problem constraints and translates it into a Traveling Salesman Problem (TSP) variant that is solved using a Mixed Integer Linear Programming (MILP) formulation.
The key contributions of the paper include a general planning framework for TPO specifications, a MILP formulation that accommodates time windows and precedence constraints, an extension to multi-robot scenarios, and a method to quantify plan robustness. The framework is demonstrated on several case studies, including an aircraft turnaround task, and the benchmark results show that the MILP-based approach outperforms state-of-the-art TSP solvers.
This research has important implications for a wide range of real-world applications, such as industrial automation, search and rescue operations, and transportation logistics, where efficient task planning and coordination for multiple robots is crucial. The proposed framework provides a promising foundation for further advancements in this field.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
✨
Prioritize Team Actions: Multi-Agent Temporal Logic Task Planning with Ordering Constraints
Bowen Ye, Jianing Zhao, Shaoyuan Li, Xiang Yin
0
0
In this paper, we investigate the problem of linear temporal logic (LTL) path planning for multi-agent systems, introducing the new concept of emph{ordering constraints}. Specifically, we consider a generic objective function that is defined for the path of each individual agent. The primary objective is to find a global plan for the team of agents, ensuring they collectively meet the specified LTL requirements. Simultaneously, we aim to maintain a pre-determined order in the values of the objective function for each agent, which we refer to as the ordering constraints. This new requirement stems from scenarios like security-aware planning, where relative orders outweigh absolute values in importance. We present an efficient algorithm to solve this problem, supported by proofs of correctness that demonstrate the optimality of our solution. Additionally, we provide a case study in security-aware path planning to illustrate the practicality and effectiveness of our proposed approach.
4/9/2024

Optimal Control Synthesis with Relaxed Global Temporal Logic Specifications for Homogeneous Multi-robot Teams
Disha Kamale, Cristian-Ioan Vasile
0
0
In this work, we address the problem of control synthesis for a homogeneous team of robots given a global temporal logic specification and formal user preferences for relaxation in case of infeasibility. The relaxation preferences are represented as a Weighted Finite-state Edit System and are used to compute a relaxed specification automaton that captures all allowable relaxations of the mission specification and their costs. For synthesis, we introduce a Mixed Integer Linear Programming (MILP) formulation that combines the motion of the team of robots with the relaxed specification automaton. Our approach combines automata-based and MILP-based methods and leverages the strengths of both approaches while avoiding their shortcomings. Specifically, the relaxed specification automaton explicitly accounts for the progress towards satisfaction, and the MILP-based optimization approach avoids the state-space explosion associated with explicit product-automata construction, thereby efficiently solving the problem. The case studies highlight the efficiency of the proposed approach.
6/5/2024
Toward Holistic Planning and Control Optimization for Dual-Arm Rearrangement
Kai Gao, Zihe Ye, Duo Zhang, Baichuan Huang, Jingjin Yu
0
0
Long-horizon task and motion planning (TAMP) is notoriously difficult to solve, let alone optimally, due to the tight coupling between the interleaved (discrete) task and (continuous) motion planning phases, where each phase on its own is frequently an NP-hard or even PSPACE-hard computational challenge. In this study, we tackle the even more challenging goal of jointly optimizing task and motion plans for a real dual-arm system in which the two arms operate in close vicinity to solve highly constrained tabletop multi-object rearrangement problems. Toward that, we construct a tightly integrated planning and control optimization pipeline, Makespan-Optimized Dual-Arm Planner (MODAP) that combines novel sampling techniques for task planning with state-of-the-art trajectory optimization techniques. Compared to previous state-of-the-art, MODAP produces task and motion plans that better coordinate a dual-arm system, delivering significantly improved execution time improvements while simultaneously ensuring that the resulting time-parameterized trajectory conforms to specified acceleration and jerk limits.
4/11/2024
➖
Fast and Adaptive Multi-agent Planning under Collaborative Temporal Logic Tasks via Poset Products
Zesen Liu, Meng Guo, Weimin Bao, Zhongkui Li
0
0
Efficient coordination and planning is essential for large-scale multi-agent systems that collaborate in a shared dynamic environment. Heuristic search methods or learning-based approaches often lack the guarantee on correctness and performance. Moreover, when the collaborative tasks contain both spatial and temporal requirements, e.g., as Linear Temporal Logic (LTL) formulas, formal methods provide a verifiable framework for task planning. However, since the planning complexity grows exponentially with the number of agents and the length of the task formula, existing studies are mostly limited to small artificial cases. To address this issue, a new planning paradigm is proposed in this work for system-wide temporal task formulas that are released online and continually. It avoids two common bottlenecks in the traditional methods, i.e., (i) the direct translation of the complete task formula to the associated Buchi automaton; and (ii) the synchronized product between the Buchi automaton and the transition models of all agents. Instead, an adaptive planning algorithm is proposed that computes the product of relaxed partially-ordered sets (R-posets) on-the-fly, and assigns these subtasks to the agents subject to the ordering constraints. It is shown that the first valid plan can be derived with a polynomial time and memory complexity w.r.t. the system size and the formula length. Our method can take into account task formulas with a length of more than 400 and a fleet with more than $400$ agents, while most existing methods fail at the formula length of 25 within a reasonable duration. The proposed method is validated on large fleets of service robots in both simulation and hardware experiments.
4/10/2024