On the Performance of Jerk-Constrained Time-Optimal Trajectory Planning for Industrial Manipulators
2404.07889
0
0
Abstract
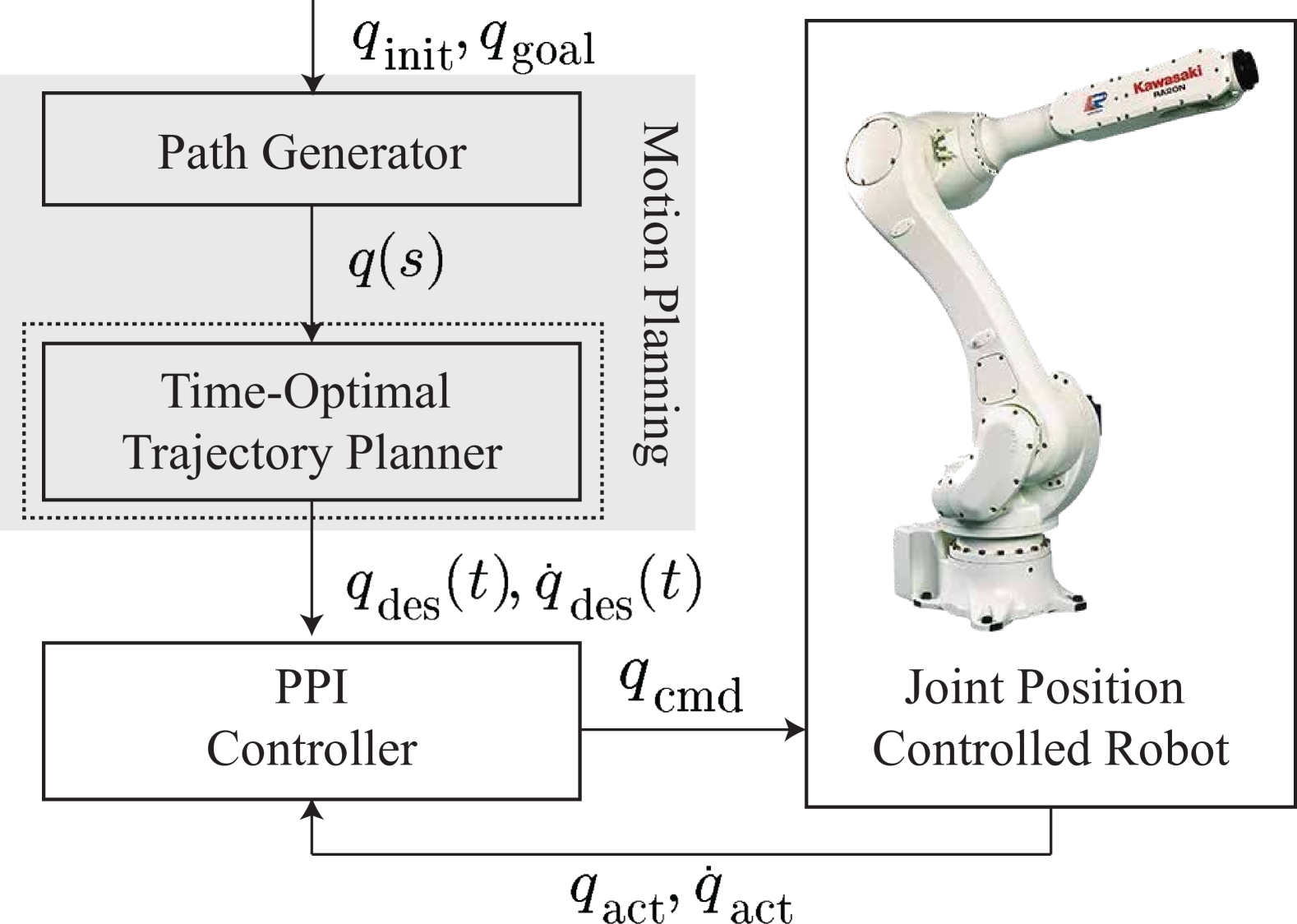
Jerk-constrained trajectories offer a wide range of advantages that collectively improve the performance of robotic systems, including increased energy efficiency, durability, and safety. In this paper, we present a novel approach to jerk-constrained time-optimal trajectory planning (TOTP), which follows a specified path while satisfying up to third-order constraints to ensure safety and smooth motion. One significant challenge in jerk-constrained TOTP is a non-convex formulation arising from the inclusion of third-order constraints. Approximating inequality constraints can be particularly challenging because the resulting solutions may violate the actual constraints. We address this problem by leveraging convexity within the proposed formulation to form conservative inequality constraints. We then obtain the desired trajectories by solving an $boldsymbol n$-dimensional Sequential Linear Program (SLP) iteratively until convergence. Lastly, we evaluate in a real robot the performance of trajectories generated with and without jerk limits in terms of peak power, torque efficiency, and tracking capability.
Create account to get full access
Overview
- This paper discusses the performance of jerk-constrained time-optimal trajectory planning for industrial manipulators.
- It explores techniques to generate smooth, time-optimal trajectories while considering constraints on the rate of change of acceleration (jerk) to improve control and reduce vibrations.
- The research aims to provide insights into the trade-offs between trajectory duration, jerk constraints, and overall system performance.
Plain English Explanation
Industrial robots often need to move quickly and precisely to be efficient. However, sudden changes in acceleration can cause the robot to vibrate, which can damage the equipment or products it is handling. This paper looks at ways to plan robot motions that are as fast as possible while also keeping the changes in acceleration smooth and gradual.
The key idea is to limit the "jerk" - the rate of change of acceleration. By constraining the jerk, the researchers can generate trajectories that are time-optimal (i.e., the fastest possible) while also being smooth and reducing vibrations. This could lead to faster, more precise, and more reliable robotic systems in industrial applications.
The paper explores the performance trade-offs involved, such as how tighter jerk constraints affect the overall speed and duration of the robot's movements. It provides insights that can help robotics engineers design better motion planning algorithms for their specific use cases.
Technical Explanation
The paper presents a framework for generating time-optimal trajectory planning for industrial manipulators subject to jerk constraints. The authors use an optimal control formulation to derive analytical solutions for the time-optimal trajectories that satisfy the jerk limits.
Through numerical simulations, the researchers analyze the performance of the jerk-constrained trajectories in terms of motion duration, energy consumption, and vibration levels. They compare the results to unconstrained time-optimal trajectories and trajectories that only consider constraints on acceleration.
The key findings show that imposing jerk constraints can significantly reduce vibrations while only moderately increasing the overall motion time. The researchers also provide guidelines on selecting appropriate jerk limits based on the specific requirements of the industrial application.
Critical Analysis
The paper provides a thorough analysis of the trade-offs involved in jerk-constrained time-optimal trajectory planning. However, the research is limited to simulations and does not include any experimental validation on physical robotic systems.
Additionally, the paper does not address the computational complexity of solving the optimal control problem, which could be a practical concern for real-time motion planning in industrial settings. Further research could explore efficient numerical algorithms or even learning-based approaches to address this challenge.
The authors also acknowledge that their analysis is based on a simplified dynamical model of the manipulator. Incorporating more detailed robot dynamics and control systems could yield additional insights and better reflect the real-world performance of the proposed techniques.
Conclusion
This paper presents an important contribution to the field of robot motion planning by demonstrating the benefits of incorporating jerk constraints into time-optimal trajectory generation. The insights provided can help robotics engineers design more reliable and efficient industrial manipulators by balancing speed, energy consumption, and vibration control.
The research highlights the value of considering higher-order dynamic constraints, such as jerk, to achieve smoother and more practical robot motions. As industrial automation continues to advance, techniques like those explored in this paper will play a crucial role in enabling faster, more precise, and more responsive robotic systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📊
Optimal Planning for Timed Partial Order Specifications
Kandai Watanabe, Georgios Fainekos, Bardh Hoxha, Morteza Lahijanian, Hideki Okamoto, Sriram Sankaranarayanan
0
0
This paper addresses the challenge of planning a sequence of tasks to be performed by multiple robots while minimizing the overall completion time subject to timing and precedence constraints. Our approach uses the Timed Partial Orders (TPO) model to specify these constraints. We translate this problem into a Traveling Salesman Problem (TSP) variant with timing and precedent constraints, and we solve it as a Mixed Integer Linear Programming (MILP) problem. Our contributions include a general planning framework for TPO specifications, a MILP formulation accommodating time windows and precedent constraints, its extension to multi-robot scenarios, and a method to quantify plan robustness. We demonstrate our framework on several case studies, including an aircraft turnaround task involving three Jackal robots, highlighting the approach's potential applicability to important real-world problems. Our benchmark results show that our MILP method outperforms state-of-the-art open-source TSP solvers OR-Tools.
5/3/2024
CC-VPSTO: Chance-Constrained Via-Point-based Stochastic Trajectory Optimisation for Safe and Efficient Online Robot Motion Planning
Lara Brudermuller, Guillaume Berger, Julius Jankowski, Raunak Bhattacharyya, Raphael Jungers, Nick Hawes
0
0
Safety in the face of uncertainty is a key challenge in robotics. We introduce a real-time capable framework to generate safe and task-efficient robot motions for stochastic control problems. We frame this as a chance-constrained optimisation problem constraining the probability of the controlled system to violate a safety constraint to be below a set threshold. To estimate this probability we propose a Monte--Carlo approximation. We suggest several ways to construct the problem given a fixed number of uncertainty samples, such that it is a reliable over-approximation of the original problem, i.e. any solution to the sample-based problem adheres to the original chance-constraint with high confidence. To solve the resulting problem, we integrate it into our motion planner VP-STO and name the enhanced framework Chance-Constrained (CC)-VPSTO. The strengths of our approach lie in i) its generality, without assumptions on the underlying uncertainty distribution, system dynamics, cost function, or the form of inequality constraints; and ii) its applicability to MPC-settings. We demonstrate the validity and efficiency of our approach on both simulation and real-world robot experiments.
4/10/2024
🧠
Optimal Whole Body Trajectory Planning for Mobile Manipulators in Planetary Exploration and Construction
Federica Storiale, Enrico Ferrentino, Federico Salvioli, Konstantinos Kapellos, Pasquale Chiacchio
0
0
Space robotics poses unique challenges arising from the limitation of energy and computational resources, and the complexity of the environment and employed platforms. At the control center, offline motion planning is fundamental in the computation of optimized trajectories accounting for the system's constraints. Smooth movements, collision and forbidden areas avoidance, target visibility and energy consumption are all important factors to consider to be able to generate feasible and optimal plans. When mobile manipulators (terrestrial, aerial) are employed, the base and the arm movements are often separately planned, ultimately resulting in sub-optimal solutions. We propose an Optimal Whole Body Planner (OptiWB) based on Discrete Dynamic Programming (DDP) and optimal interpolation. Kinematic redundancy is exploited for collision and forbidden areas avoidance, and to improve target illumination and visibility from onboard cameras. The planner, implemented in ROS (Robot Operating System), interfaces 3DROCS, a mission planner used in several programs of the European Space Agency (ESA) to support planetary exploration surface missions and part of the ExoMars Rover's planning software. The proposed approach is exercised on a simplified version of the Analog-1 Interact rover by ESA, a 7-DOFs robotic arm mounted on a four wheels non-holonomic platform.
5/24/2024

SOMTP: Self-Supervised Learning-Based Optimizer for MPC-Based Safe Trajectory Planning Problems in Robotics
Yifan Liu, You Wang, Guang Li
0
0
Model Predictive Control (MPC)-based trajectory planning has been widely used in robotics, and incorporating Control Barrier Function (CBF) constraints into MPC can greatly improve its obstacle avoidance efficiency. Unfortunately, traditional optimizers are resource-consuming and slow to solve such non-convex constrained optimization problems (COPs) while learning-based methods struggle to satisfy the non-convex constraints. In this paper, we propose SOMTP algorithm, a self-supervised learning-based optimizer for CBF-MPC trajectory planning. Specifically, first, SOMTP employs problem transcription to satisfy most of the constraints. Then the differentiable SLPG correction is proposed to move the solution closer to the safe set and is then converted as the guide policy in the following training process. After that, inspired by the Augmented Lagrangian Method (ALM), our training algorithm integrated with guide policy constraints is proposed to enable the optimizer network to converge to a feasible solution. Finally, experiments show that the proposed algorithm has better feasibility than other learning-based methods and can provide solutions much faster than traditional optimizers with similar optimality.
5/16/2024