Overconstrained Locomotion

0
❗
Sign in to get full access
Overview
- This paper explores the design, control, and learning of a novel robotic limb that can switch between reptile-like and mammal-like morphologies.
- It focuses on using overconstrained linkages, which have strong theoretical foundations but are underutilized in robotics.
- The researchers demonstrate the advantages of Overconstrained Robotic Limbs (ORLs) over traditional planar limbs in terms of energy efficiency and dynamic locomotion.
Plain English Explanation
The researchers have developed a robotic limb that can change its shape and movement capabilities. Unlike most robotic limbs, which are designed to move in a flat, planar way, this new limb uses a special type of linkage called an "overconstrained linkage."
Overconstrained linkages have more connections between their parts than are strictly necessary for the limb to move. This gives them some interesting properties - they can switch between different shapes and movement patterns, just like the limbs of reptiles and mammals.
The researchers show that this overconstrained limb design has some key advantages. It can move more efficiently and perform dynamic, high-speed locomotion tasks better than traditional planar limbs. They use Model Predictive Control and Reinforcement Learning to control the limb and demonstrate these benefits.
Ultimately, this work represents an important step towards creating robot limbs inspired by the flexibility and efficiency of biological limbs. By embracing the complexity of overconstrained linkages, the researchers have opened up new possibilities for robotic locomotion and morphology.
Technical Explanation
The paper examines the design, control, and learning of a novel robotic limb that can switch between a reptile-inspired and a mammal-inspired morphology. Unlike the prevailing focus on planar linkages, this research explores the use of overconstrained linkages as the limb mechanism.
Overconstrained linkages have more connections between their parts than are strictly necessary for the limb to move. This added complexity gives the limb the ability to transform between different shapes and movement patterns. The researchers use the Bennett linkage, the simplest case of an overconstrained linkage, as an example of an Overconstrained Robotic Limb (ORL).
To control the ORL, the researchers apply Model Predictive Control (MPC) to simulate a range of locomotion tasks. They find that the ORL design is superior in terms of energy efficiency compared to traditional planar limbs, especially when considering factors like foothold distance and speed.
The researchers further validate their findings using Reinforcement Learning (RL) to optimize overconstrained locomotion policies. From an evolutionary biology perspective, these results highlight the fundamental differences in limb design between reptiles and mammals, and represent the first documented instance of ORLs outperforming planar limb designs in dynamic locomotion.
Critical Analysis
The paper presents a compelling case for the use of overconstrained linkages in robotic limb design, but there are a few important considerations:
-
The research is largely simulation-based, and the researchers acknowledge the need to deploy the models on physical robotic hardware to fully validate the benefits of the ORL approach. Bridging the "Sim2Real" gap is a well-known challenge in robotics.
-
The analysis focuses on the Bennett linkage as a specific example of an overconstrained linkage. While this serves as a proof of concept, the researchers should explore a wider range of overconstrained linkage designs and their potential tradeoffs.
-
The paper does not provide a comprehensive comparison of the ORL approach to other state-of-the-art limb designs, such as those using parallel mechanisms or variable-stiffness actuators. A more thorough benchmarking against contemporary methods would strengthen the claims of superiority.
-
The evolutionary biology implications are interesting, but the researchers could delve deeper into the underlying principles and mechanisms that give the ORL design its advantages. A more rigorous exploration of the biomechanical foundations would further strengthen the biological inspiration.
Overall, this paper represents an important step forward in the exploration of overconstrained linkages for robotic limb design. Addressing the above considerations in future work would help solidify the practical and theoretical contributions of this research.
Conclusion
This paper presents a novel robotic limb design that can switch between reptile-like and mammal-like morphologies by employing overconstrained linkages, specifically the Bennett linkage. The researchers demonstrate the superiority of this Overconstrained Robotic Limb (ORL) approach over traditional planar limb designs in terms of energy efficiency and dynamic locomotion capabilities.
By embracing the theoretical complexity of overconstrained linkages, the researchers have opened up new possibilities for robotic limb design and control. Their findings have important implications for the development of evolutionary-inspired, energy-efficient robots that can adapt their morphology and locomotion to diverse environments and tasks.
Future work will focus on bridging the gap between simulation and physical implementation, exploring a wider range of overconstrained linkage designs, and further investigating the biomechanical foundations underlying the advantages of the ORL approach. Ultimately, this research represents a significant step towards creating more versatile and capable robotic systems inspired by the flexibility and efficiency of biological limbs.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
❗
0
Overconstrained Locomotion
Haoran Sun, Bangchao Huang, Zishang Zhang, Ronghan Xu, Guojing Huang, Shihao Feng, Guangyi Huang, Jiayi Yin, Nuofan Qiu, Hua Chen, Wei Zhang, Jia Pan, Fang Wan, Chaoyang Song
This paper studies the design, control, and learning of a novel robotic limb that produces overconstrained locomotion by employing the Bennett linkage for motion generation, capable of parametric reconfiguration between a reptile- and mammal-inspired morphology within a single quadruped. In contrast to the prevailing focus on planar linkages, this research delves into adopting overconstrained linkages as the limb mechanism. The overconstrained linkages have solid theoretical foundations in advanced kinematics but are under-explored in robotic applications. This study showcases the morphological superiority of Overconstrained Robotic Limbs (ORLs) that can transform into planar or spherical limbs, exemplified using the simplest case of a Bennett linkage as an ORL. We apply Model Predictive Control (MPC) to simulate a range of overconstrained locomotion tasks, revealing its superiority in energy efficiency against planar limbs when considering foothold distances and speeds. The results are further verified in overconstrained locomotion policies optimized from Reinforcement Learning (RL). From an evolutionary biology perspective, these findings highlight the mechanism distinctions in limb design between reptiles and mammals and represent the first documented instance of ORLs outperforming planar limb designs in dynamic locomotion. Future studies will focus on deploying the model-based and learning-based overconstrained locomotion skills in the robotic hardware to close the Sim2Real gap for developing evolutionary-inspired, energy-efficient control of novel robotic limbs.
Read more7/31/2024

0
Evolutionary Morphology Towards Overconstrained Locomotion via Large-Scale, Multi-Terrain Deep Reinforcement Learning
Yenan Chen, Chuye Zhang, Pengxi Gu, Jianuo Qiu, Jiayi Yin, Nuofan Qiu, Guojing Huang, Bangchao Huang, Zishang Zhang, Hui Deng, Wei Zhang, Fang Wan, Chaoyang Song
While the animals' Fin-to-Limb evolution has been well-researched in biology, such morphological transformation remains under-adopted in the modern design of advanced robotic limbs. This paper investigates a novel class of overconstrained locomotion from a design and learning perspective inspired by evolutionary morphology, aiming to integrate the concept of `intelligent design under constraints' - hereafter referred to as constraint-driven design intelligence - in developing modern robotic limbs with superior energy efficiency. We propose a 3D-printable design of robotic limbs parametrically reconfigurable as a classical planar 4-bar linkage, an overconstrained Bennett linkage, and a spherical 4-bar linkage. These limbs adopt a co-axial actuation, identical to the modern legged robot platforms, with the added capability of upgrading into a wheel-legged system. Then, we implemented a large-scale, multi-terrain deep reinforcement learning framework to train these reconfigurable limbs for a comparative analysis of overconstrained locomotion in energy efficiency. Results show that the overconstrained limbs exhibit more efficient locomotion than planar limbs during forward and sideways walking over different terrains, including floors, slopes, and stairs, with or without random noises, by saving at least 22% mechanical energy in completing the traverse task, with the spherical limbs being the least efficient. It also achieves the highest average speed of 0.85 meters per second on flat terrain, which is 20% faster than the planar limbs. This study paves the path for an exciting direction for future research in overconstrained robotics leveraging evolutionary morphology and reconfigurable mechanism intelligence when combined with state-of-the-art methods in deep reinforcement learning.
Read more7/2/2024
0
Diffusion-based learning of contact plans for agile locomotion
Victor Dh'edin, Adithya Kumar Chinnakkonda Ravi, Armand Jordana, Huaijiang Zhu, Avadesh Meduri, Ludovic Righetti, Bernhard Scholkopf, Majid Khadiv
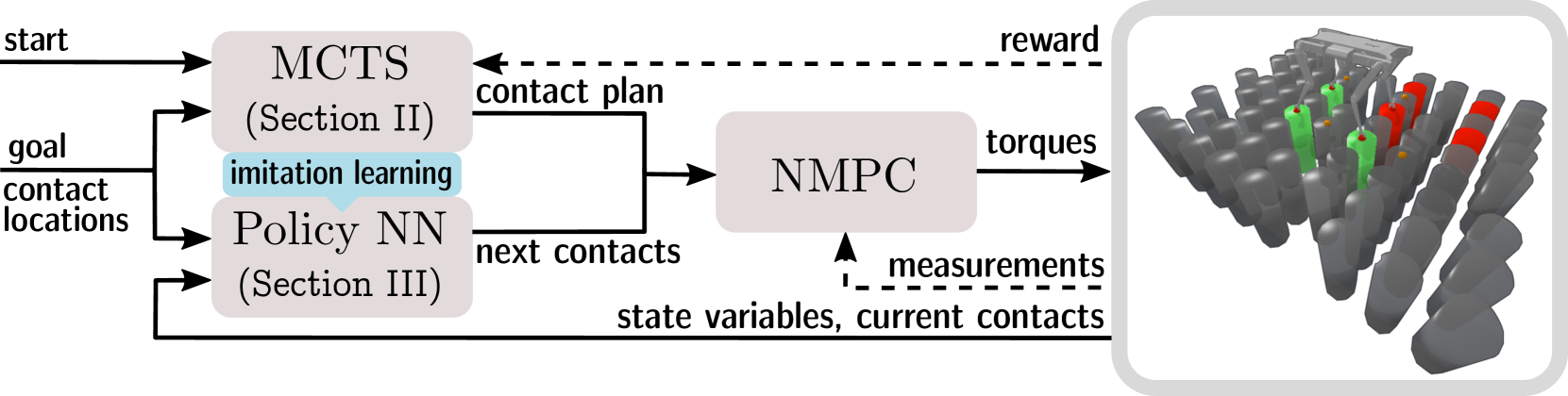
Legged robots have become capable of performing highly dynamic maneuvers in the past few years. However, agile locomotion in highly constrained environments such as stepping stones is still a challenge. In this paper, we propose a combination of model-based control, search, and learning to design efficient control policies for agile locomotion on stepping stones. In our framework, we use nonlinear model predictive control (NMPC) to generate whole-body motions for a given contact plan. To efficiently search for an optimal contact plan, we propose to use Monte Carlo tree search (MCTS). While the combination of MCTS and NMPC can quickly find a feasible plan for a given environment (a few seconds), it is not yet suitable to be used as a reactive policy. Hence, we generate a dataset for optimal goal-conditioned policy for a given scene and learn it through supervised learning. In particular, we leverage the power of diffusion models in handling multi-modality in the dataset. We test our proposed framework on a scenario where our quadruped robot Solo12 successfully jumps to different goals in a highly constrained environment.
Read more7/17/2024
🌀
0
Manipulator as a Tail: Promoting Dynamic Stability for Legged Locomotion
Huang Huang, Antonio Loquercio, Ashish Kumar, Neerja Thakkar, Ken Goldberg, Jitendra Malik
For locomotion, is an arm on a legged robot a liability or an asset for locomotion? Biological systems evolved additional limbs beyond legs that facilitates postural control. This work shows how a manipulator can be an asset for legged locomotion at high speeds or under external perturbations, where the arm serves beyond manipulation. Since the system has 15 degrees of freedom (twelve for the legged robot and three for the arm), off-the-shelf reinforcement learning (RL) algorithms struggle to learn effective locomotion policies. Inspired by Bernstein's neurophysiological theory of animal motor learning, we develop an incremental training procedure that initially freezes some degrees of freedom and gradually releases them, using behaviour cloning (BC) from an early learning procedure to guide optimization in later learning. Simulation experiments show that our policy increases the success rate by up to 61 percentage points over the baselines. Simulation and real robot experiments suggest that our policy learns to use the arm as a tail to initiate robot turning at high speeds and to stabilize the quadruped under external perturbations. Quantitatively, in simulation experiments, we cut the failure rate up to 43.6% during high-speed turning and up to 31.8% for quadruped under external forces compared to using a locked arm.
Read more7/26/2024