PARE-Net: Position-Aware Rotation-Equivariant Networks for Robust Point Cloud Registration

0

Sign in to get full access
Overview
- The paper presents PARE-Net, a position-aware rotation-equivariant network for robust point cloud registration.
- PARE-Net aims to address the challenge of point cloud registration, which is crucial for various applications like 3D reconstruction, robotics, and augmented reality.
- The key features of PARE-Net include position-aware feature learning, rotation-equivariant design, and robust registration capabilities.
Plain English Explanation
PARE-Net is a deep learning model designed to work with 3D point cloud data. Point clouds are collections of individual data points that represent the surface of an object or environment in three-dimensional space. PARE-Net was developed to help computers accurately align and match different point cloud datasets, a process known as registration.
The researchers behind PARE-Net recognized that traditional point cloud registration methods can struggle with challenges like varying object orientations and noisy or incomplete data. To address these issues, they created a neural network architecture that is "position-aware" and "rotation-equivariant." This means the model can learn features that are sensitive to the spatial location of points in the cloud, as well as features that remain consistent even when the object is rotated.
By incorporating these capabilities, PARE-Net is able to more robustly register point clouds, even in the presence of changes in object orientation or missing data. This can be helpful for applications like 3D mapping, where accurate alignment of scanned environments is crucial, or robotic systems that need to understand and interact with their surroundings.
The PointDIFFORMER and Deep-PE papers also explore deep learning techniques for point cloud registration, while the EDollar3Dollar-Net, Asymmetrical Siamese Network, and BiEquiformer papers focus on related tasks like normal estimation and global point cloud representation.
Technical Explanation
The core of PARE-Net is a position-aware, rotation-equivariant feature learning module that extracts informative features from the input point cloud. This module consists of several convolutional layers that operate directly on the 3D coordinates of the points, without requiring any additional preprocessing or voxelization.
The position-aware design means the network learns features that are sensitive to the spatial locations of the points, capturing their relative positions within the cloud. The rotation-equivariant property ensures that these features remain consistent even when the object is rotated, which is crucial for robust registration.
After the feature extraction stage, PARE-Net uses a transformer-based architecture to aggregate the learned features and predict the optimal transformation (rotation and translation) to align the input point cloud with a reference cloud. The transformer module allows the network to effectively capture long-range dependencies between different regions of the point cloud, further improving the registration accuracy.
The authors of the paper evaluate PARE-Net on several standard point cloud registration benchmarks, including the
Critical Analysis
The paper provides a comprehensive technical description of the PARE-Net architecture and its key components, such as the position-aware and rotation-equivariant feature learning module and the transformer-based registration module. The authors have also conducted thorough experiments to validate the performance of PARE-Net on various point cloud registration tasks.
One potential limitation of the research is the reliance on synthetic datasets like
Additionally, the paper does not delve deeply into the computational efficiency or inference time of PARE-Net, which could be an important consideration for real-time applications like robotic navigation or augmented reality. Further analysis of the model's resource requirements and potential optimizations could help assess its practical deployability.
Overall, the PARE-Net paper presents a promising approach to robust point cloud registration, and the insights gained from this research could inspire further advancements in the field of 3D perception and understanding. The BiEquiformer paper's exploration of bi-equivariant representations for global point cloud understanding could potentially be combined with the position-aware and rotation-equivariant features of PARE-Net to further enhance 3D perception capabilities.
Conclusion
The PARE-Net paper introduces a novel deep learning model for robust point cloud registration. By incorporating position-aware and rotation-equivariant feature learning, PARE-Net demonstrates improved performance on standard benchmarks compared to previous methods. This research highlights the importance of developing 3D perception techniques that can handle challenges like varying object orientations and incomplete data, which are crucial for a wide range of applications, from 3D reconstruction to robotics and augmented reality.
The insights and techniques presented in this paper can serve as a foundation for further advancements in the field of 3D point cloud processing, potentially leading to more accurate and reliable systems for understanding and interacting with the physical world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
PARE-Net: Position-Aware Rotation-Equivariant Networks for Robust Point Cloud Registration
Runzhao Yao, Shaoyi Du, Wenting Cui, Canhui Tang, Chengwu Yang
Learning rotation-invariant distinctive features is a fundamental requirement for point cloud registration. Existing methods often use rotation-sensitive networks to extract features, while employing rotation augmentation to learn an approximate invariant mapping rudely. This makes networks fragile to rotations, overweight, and hinders the distinctiveness of features. To tackle these problems, we propose a novel position-aware rotation-equivariant network, for efficient, light-weighted, and robust registration. The network can provide a strong model inductive bias to learn rotation-equivariant/invariant features, thus addressing the aforementioned limitations. To further improve the distinctiveness of descriptors, we propose a position-aware convolution, which can better learn spatial information of local structures. Moreover, we also propose a feature-based hypothesis proposer. It leverages rotation-equivariant features that encode fine-grained structure orientations to generate reliable model hypotheses. Each correspondence can generate a hypothesis, thus it is more efficient than classic estimators that require multiple reliable correspondences. Accordingly, a contrastive rotation loss is presented to enhance the robustness of rotation-equivariant features against data degradation. Extensive experiments on indoor and outdoor datasets demonstrate that our method significantly outperforms the SOTA methods in terms of registration recall while being lightweight and keeping a fast speed. Moreover, experiments on rotated datasets demonstrate its robustness against rotation variations. Code is available at https://github.com/yaorz97/PARENet.
Read more7/16/2024
0
PointDifformer: Robust Point Cloud Registration With Neural Diffusion and Transformer
Rui She, Qiyu Kang, Sijie Wang, Wee Peng Tay, Kai Zhao, Yang Song, Tianyu Geng, Yi Xu, Diego Navarro Navarro, Andreas Hartmannsgruber
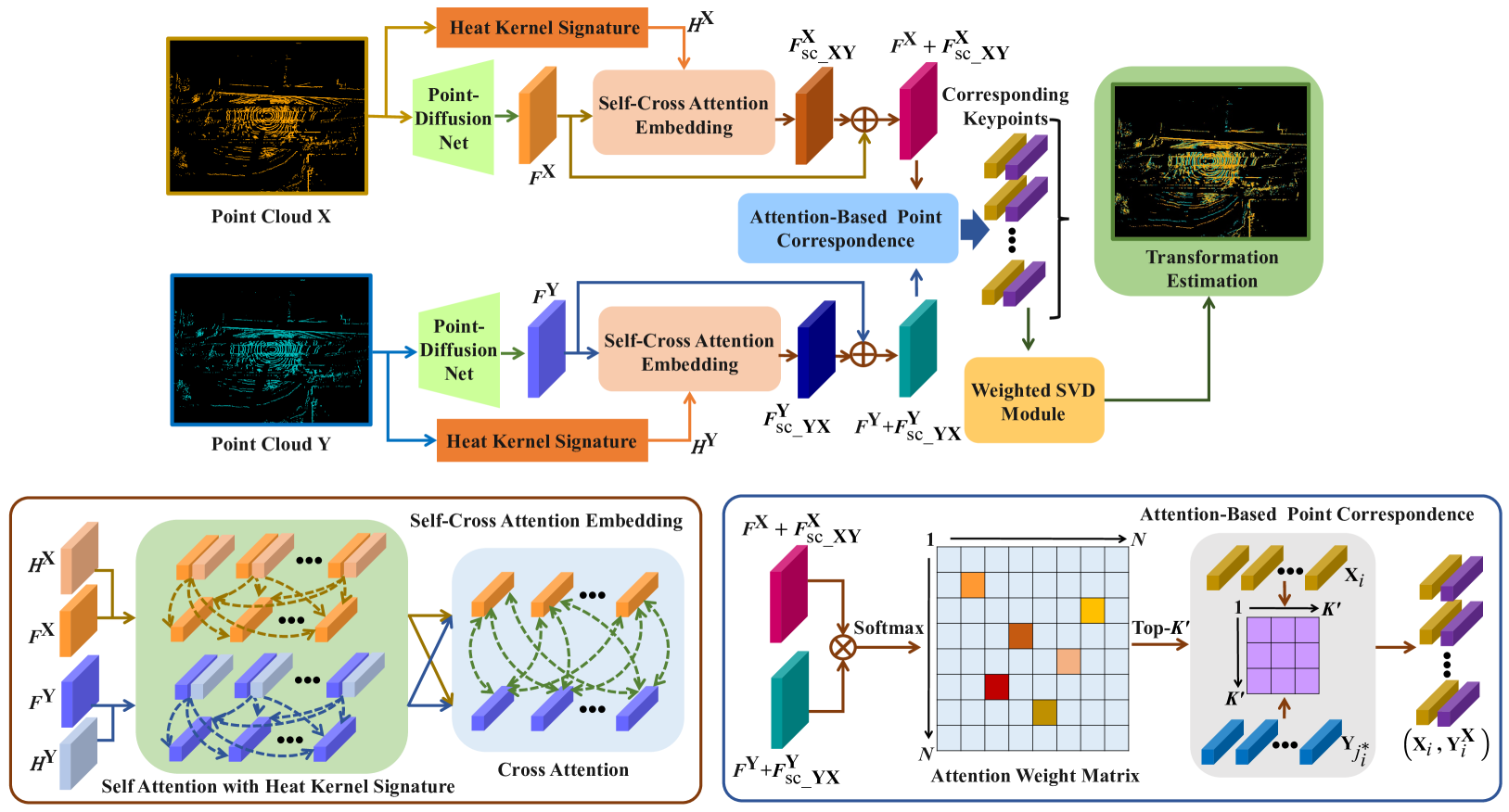
Point cloud registration is a fundamental technique in 3-D computer vision with applications in graphics, autonomous driving, and robotics. However, registration tasks under challenging conditions, under which noise or perturbations are prevalent, can be difficult. We propose a robust point cloud registration approach that leverages graph neural partial differential equations (PDEs) and heat kernel signatures. Our method first uses graph neural PDE modules to extract high dimensional features from point clouds by aggregating information from the 3-D point neighborhood, thereby enhancing the robustness of the feature representations. Then, we incorporate heat kernel signatures into an attention mechanism to efficiently obtain corresponding keypoints. Finally, a singular value decomposition (SVD) module with learnable weights is used to predict the transformation between two point clouds. Empirical experiments on a 3-D point cloud dataset demonstrate that our approach not only achieves state-of-the-art performance for point cloud registration but also exhibits better robustness to additive noise or 3-D shape perturbations.
Read more4/23/2024

0
Deep-PE: A Learning-Based Pose Evaluator for Point Cloud Registration
Junjie Gao, Chongjian Wang, Zhongjun Ding, Shuangmin Chen, Shiqing Xin, Changhe Tu, Wenping Wang
In the realm of point cloud registration, the most prevalent pose evaluation approaches are statistics-based, identifying the optimal transformation by maximizing the number of consistent correspondences. However, registration recall decreases significantly when point clouds exhibit a low overlap rate, despite efforts in designing feature descriptors and establishing correspondences. In this paper, we introduce Deep-PE, a lightweight, learning-based pose evaluator designed to enhance the accuracy of pose selection, especially in challenging point cloud scenarios with low overlap. Our network incorporates a Pose-Aware Attention (PAA) module to simulate and learn the alignment status of point clouds under various candidate poses, alongside a Pose Confidence Prediction (PCP) module that predicts the likelihood of successful registration. These two modules facilitate the learning of both local and global alignment priors. Extensive tests across multiple benchmarks confirm the effectiveness of Deep-PE. Notably, on 3DLoMatch with a low overlap rate, Deep-PE significantly outperforms state-of-the-art methods by at least 8% and 11% in registration recall under handcrafted FPFH and learning-based FCGF descriptors, respectively. To the best of our knowledge, this is the first study to utilize deep learning to select the optimal pose without the explicit need for input correspondences.
Read more5/28/2024

0
SE3ET: SE(3)-Equivariant Transformer for Low-Overlap Point Cloud Registration
Chien Erh Lin, Minghan Zhu, Maani Ghaffari
Partial point cloud registration is a challenging problem in robotics, especially when the robot undergoes a large transformation, causing a significant initial pose error and a low overlap between measurements. This work proposes exploiting equivariant learning from 3D point clouds to improve registration robustness. We propose SE3ET, an SE(3)-equivariant registration framework that employs equivariant point convolution and equivariant transformer designs to learn expressive and robust geometric features. We tested the proposed registration method on indoor and outdoor benchmarks where the point clouds are under arbitrary transformations and low overlapping ratios. We also provide generalization tests and run-time performance.
Read more7/25/2024