ParisLuco3D: A high-quality target dataset for domain generalization of LiDAR perception

0
👨🏫
Sign in to get full access
Overview
- This paper introduces a new dataset called ParisLuco3D, designed for evaluating LiDAR-based perception tasks like semantic segmentation, object detection, and tracking.
- ParisLuco3D is specifically created to enable cross-domain evaluation, helping researchers test their models in real-world conditions beyond the datasets used for training.
- The paper also provides online benchmarks for the LiDAR perception tasks to ensure a fair comparison across different methods.
Plain English Explanation
LiDAR is a key sensor for autonomous vehicles, as it can collect highly detailed 3D information about the surrounding environment. Exploiting this information for perception is an interesting challenge, especially as the amount of available data increases.
The performance of various LiDAR perception tasks, such as semantic segmentation, object detection, and tracking, has improved over time. However, the ability to generalize these optimized models to new environments and sensors remains an important test of their real-world capabilities.
To address this, the researchers have created a new dataset called ParisLuco3D, which is specifically designed for cross-domain evaluation. This means that researchers can use ParisLuco3D to test how well their LiDAR perception models perform in conditions that are different from the ones they were trained on, helping to ensure the models work reliably in the real world.
In addition to the dataset, the researchers provide online benchmarks for the key LiDAR perception tasks, allowing for a fair comparison of different methods. This helps the research community identify the most promising approaches and continue advancing the state of the art in autonomous driving technology.
Technical Explanation
The ParisLuco3D dataset is a novel resource specifically created to enable cross-domain evaluation of LiDAR perception tasks. It includes diverse urban scenes captured across multiple cities, sensor types, and environmental conditions, providing a more realistic test of model performance compared to existing datasets.
The dataset is accompanied by online benchmarks for three key LiDAR perception tasks: semantic segmentation, object detection, and tracking. These benchmarks ensure a fair and standardized evaluation process, allowing researchers to compare the performance of their methods against each other.
The dataset, evaluation scripts, and benchmark links are publicly available, making it easier for the research community to utilize this resource and advance the state of the art in LiDAR-based autonomous driving perception.
Critical Analysis
The ParisLuco3D dataset and accompanying benchmarks are a valuable contribution to the field of LiDAR-based perception for autonomous driving. By focusing on cross-domain evaluation, the researchers are addressing an important challenge in translating optimized models to real-world conditions.
However, the paper does not provide a detailed analysis of the dataset's limitations or potential biases. For example, it's unclear how representative the selected cities and sensor types are of the broader range of environments and hardware that autonomous vehicles may encounter in practice. Further research could explore these aspects and help identify areas for improvement.
Additionally, the paper does not discuss the computational or memory requirements of the evaluated perception tasks, which are crucial considerations for real-time deployment in autonomous vehicles. Future studies could investigate the trade-offs between model performance and resource efficiency.
Conclusion
The ParisLuco3D dataset and accompanying benchmarks provide a valuable resource for evaluating the cross-domain performance of LiDAR-based perception models for autonomous driving. By enabling fair comparisons across different methods and testing their robustness in diverse real-world conditions, this work helps advance the state of the art in this critical technology. As the research community continues to explore innovative approaches to LiDAR perception, resources like ParisLuco3D will play an important role in ensuring the reliability and safety of autonomous vehicles.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
👨🏫
0
ParisLuco3D: A high-quality target dataset for domain generalization of LiDAR perception
Jules Sanchez, Louis Soum-Fontez, Jean-Emmanuel Deschaud, Francois Goulette
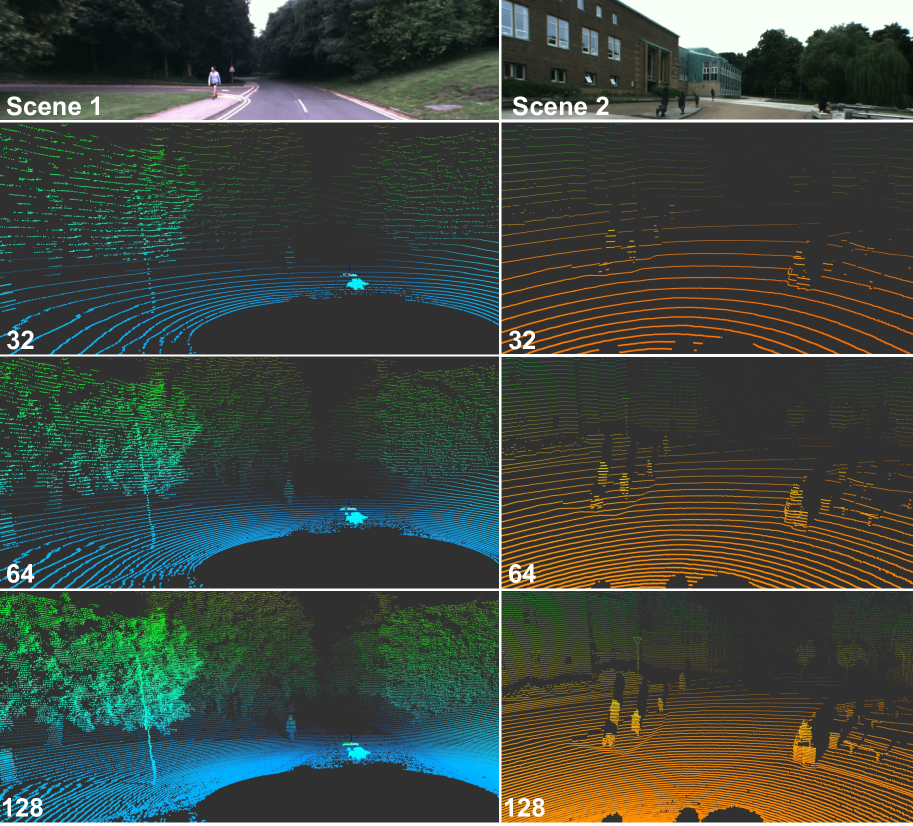
LiDAR is an essential sensor for autonomous driving by collecting precise geometric information regarding a scene. %Exploiting this information for perception is interesting as the amount of available data increases. As the performance of various LiDAR perception tasks has improved, generalizations to new environments and sensors has emerged to test these optimized models in real-world conditions. This paper provides a novel dataset, ParisLuco3D, specifically designed for cross-domain evaluation to make it easier to evaluate the performance utilizing various source datasets. Alongside the dataset, online benchmarks for LiDAR semantic segmentation, LiDAR object detection, and LiDAR tracking are provided to ensure a fair comparison across methods. The ParisLuco3D dataset, evaluation scripts, and links to benchmarks can be found at the following website:https://npm3d.fr/parisluco3d
Read more6/5/2024

0
Multimodal 3D Object Detection on Unseen Domains
Deepti Hegde, Suhas Lohit, Kuan-Chuan Peng, Michael J. Jones, Vishal M. Patel
LiDAR datasets for autonomous driving exhibit biases in properties such as point cloud density, range, and object dimensions. As a result, object detection networks trained and evaluated in different environments often experience performance degradation. Domain adaptation approaches assume access to unannotated samples from the test distribution to address this problem. However, in the real world, the exact conditions of deployment and access to samples representative of the test dataset may be unavailable while training. We argue that the more realistic and challenging formulation is to require robustness in performance to unseen target domains. We propose to address this problem in a two-pronged manner. First, we leverage paired LiDAR-image data present in most autonomous driving datasets to perform multimodal object detection. We suggest that working with multimodal features by leveraging both images and LiDAR point clouds for scene understanding tasks results in object detectors more robust to unseen domain shifts. Second, we train a 3D object detector to learn multimodal object features across different distributions and promote feature invariance across these source domains to improve generalizability to unseen target domains. To this end, we propose CLIX$^text{3D}$, a multimodal fusion and supervised contrastive learning framework for 3D object detection that performs alignment of object features from same-class samples of different domains while pushing the features from different classes apart. We show that CLIX$^text{3D}$ yields state-of-the-art domain generalization performance under multiple dataset shifts.
Read more4/19/2024
0
DurLAR: A High-fidelity 128-channel LiDAR Dataset with Panoramic Ambient and Reflectivity Imagery for Multi-modal Autonomous Driving Applications
Li Li, Khalid N. Ismail, Hubert P. H. Shum, Toby P. Breckon
We present DurLAR, a high-fidelity 128-channel 3D LiDAR dataset with panoramic ambient (near infrared) and reflectivity imagery, as well as a sample benchmark task using depth estimation for autonomous driving applications. Our driving platform is equipped with a high resolution 128 channel LiDAR, a 2MPix stereo camera, a lux meter and a GNSS/INS system. Ambient and reflectivity images are made available along with the LiDAR point clouds to facilitate multi-modal use of concurrent ambient and reflectivity scene information. Leveraging DurLAR, with a resolution exceeding that of prior benchmarks, we consider the task of monocular depth estimation and use this increased availability of higher resolution, yet sparse ground truth scene depth information to propose a novel joint supervised/self-supervised loss formulation. We compare performance over both our new DurLAR dataset, the established KITTI benchmark and the Cityscapes dataset. Our evaluation shows our joint use supervised and self-supervised loss terms, enabled via the superior ground truth resolution and availability within DurLAR improves the quantitative and qualitative performance of leading contemporary monocular depth estimation approaches (RMSE=3.639, Sq Rel=0.936).
Read more6/17/2024
📊
0
Empowering Urban Traffic Management: Elevated 3D LiDAR for Data Collection and Advanced Object Detection Analysis
Nawfal Guefrachi, Hakim Ghazzai, Ahmad Alsharoa
The 3D object detection capabilities in urban environments have been enormously improved by recent developments in Light Detection and Range (LiDAR) technology. This paper presents a novel framework that transforms the detection and analysis of 3D objects in traffic scenarios by utilizing the power of elevated LiDAR sensors. We are presenting our methodology's remarkable capacity to collect complex 3D point cloud data, which allows us to accurately and in detail capture the dynamics of urban traffic. Due to the limitation in obtaining real-world traffic datasets, we utilize the simulator to generate 3D point cloud for specific scenarios. To support our experimental analysis, we firstly simulate various 3D point cloud traffic-related objects. Then, we use this dataset as a basis for training and evaluating our 3D object detection models, in identifying and monitoring both vehicles and pedestrians in simulated urban traffic environments. Next, we fine tune the Point Voxel-Region-based Convolutional Neural Network (PV-RCNN) architecture, making it more suited to handle and understand the massive volumes of point cloud data generated by our urban traffic simulations. Our results show the effectiveness of the proposed solution in accurately detecting objects in traffic scenes and highlight the role of LiDAR in improving urban safety and advancing intelligent transportation systems.
Read more5/24/2024