Paved2Paradise: Cost-Effective and Scalable LiDAR Simulation by Factoring the Real World

0
📈
Sign in to get full access
Overview
- Obtaining and annotating large, diverse datasets for training neural networks on 3D point cloud data is costly and time-consuming.
- The paper introduces "Paved2Paradise," a simple and cost-effective approach for generating fully labeled, diverse, and realistic lidar datasets from scratch with minimal human annotation.
- The key insight is to collect separate background and object datasets, and then intelligently combine them to produce a combinatorially large and diverse training set.
Plain English Explanation
The paper describes a new method called "Paved2Paradise" that can help create large, high-quality datasets for training AI models on 3D point cloud data, which is data collected by lidar sensors. [This is relevant to the research on zero-shot detection of buildings from mobile lidar, enhancing 3D point clouds, and generating realistic training data from time-lapse imagery.]
Creating these kinds of datasets is usually very difficult and expensive, because you need to collect a lot of 3D data and carefully label everything in the data. The Paved2Paradise method has a clever solution to this problem. Instead of trying to collect and label everything at once, it splits the process into two steps:
-
First, they collect a lot of "background" data, which is just general 3D data of the environment without any specific objects in it. This is the easy part.
-
Then, they record videos of individual objects (like people) doing different actions in an isolated environment, like a parking lot. This lets them easily get labeled data of the objects they care about.
Finally, they combine the background data and object data in clever ways to generate a huge, diverse training dataset automatically. This allows them to create high-quality training data for AI models at a fraction of the usual cost.
The paper demonstrates this approach by using it to create datasets for two tasks: detecting people in orchards (where no public datasets existed before), and detecting pedestrians in urban environments. The results show that AI models trained on the synthetic Paved2Paradise data perform very well, suggesting this could be a powerful tool for accelerating 3D model development in fields where real-world data is hard to come by.
Technical Explanation
The core insight of the Paved2Paradise approach is to "factor the real world" by collecting separate background and object datasets, and then intelligently combining them to produce a large and diverse synthetic training set. [This connects to the research on generative lidar simulation and large-scale 3D modeling.]
The Paved2Paradise pipeline consists of four steps:
- Collecting copious background data, which is 3D point cloud data of general environments without any specific objects.
- Recording individuals from the desired object class(es) (e.g. people) performing different behaviors in an isolated environment like a parking lot.
- Bootstrapping labels for the object dataset, since the isolated recordings make this easier than labeling a complex real-world scene.
- Generating training samples by placing the recorded object instances at arbitrary locations in the background data.
By combining the background and object data in this way, the authors are able to produce a combinatorially large and diverse synthetic training set. They demonstrate the effectiveness of this approach by training models for two tasks:
- Human detection in orchards, where no public datasets exist. Models trained on Paved2Paradise data are highly effective at detecting people, even when heavily occluded.
- Pedestrian detection in urban environments. Models trained on Paved2Paradise data that uses KITTI backgrounds perform comparably to models trained on the actual KITTI dataset.
These results suggest the Paved2Paradise pipeline can help accelerate 3D model development in domains where acquiring real-world lidar datasets has been prohibitively expensive or difficult.
Critical Analysis
The Paved2Paradise approach appears to be a clever and promising solution for generating large, diverse training datasets for 3D perception tasks. By factoring the data collection process into background and object components, the authors are able to sidestep many of the challenges associated with acquiring and annotating real-world lidar data.
That said, there are a few potential limitations and areas for further research:
- The quality and realism of the synthetic data relies heavily on the fidelity of the background and object datasets. Collecting these datasets in a way that captures the full complexity of real-world environments may still be challenging.
- The paper only demonstrates results on two specific tasks (human and pedestrian detection). It's unclear how well the approach would generalize to a wider range of 3D perception problems.
- The authors do not provide much analysis of the diversity or distribution of the synthetic training data, which could be an important factor in model performance.
Overall, the Paved2Paradise method is a creative and promising approach that deserves further exploration and validation across a broader set of applications. Researchers should continue to critically examine the strengths, limitations, and potential biases of synthetic data generation techniques like this one.
Conclusion
The Paved2Paradise paper introduces a novel and cost-effective method for generating high-quality, diverse training data for 3D perception models using lidar point clouds. By factoring the data collection process and intelligently combining background and object datasets, the authors are able to produce synthetic training data that is highly effective for tasks like human and pedestrian detection.
This work has the potential to significantly accelerate the development of 3D computer vision models in sectors where acquiring real-world lidar datasets has been prohibitively expensive or time-consuming. As the authors demonstrate, Paved2Paradise-generated data can match or even exceed the performance of models trained on actual real-world datasets.
While the approach has some limitations that merit further investigation, the core ideas behind Paved2Paradise represent an important step forward in addressing the data bottleneck that has historically constrained progress in 3D perception. As the field continues to evolve, techniques like this will be crucial for unlocking the full potential of lidar and other 3D sensing modalities.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📈
0
Paved2Paradise: Cost-Effective and Scalable LiDAR Simulation by Factoring the Real World
Michael A. Alcorn, Noah Schwartz
To achieve strong real world performance, neural networks must be trained on large, diverse datasets; however, obtaining and annotating such datasets is costly and time-consuming, particularly for 3D point clouds. In this paper, we describe Paved2Paradise, a simple, cost-effective approach for generating fully labeled, diverse, and realistic lidar datasets from scratch, all while requiring minimal human annotation. Our key insight is that, by deliberately collecting separate background and object datasets (i.e., factoring the real world), we can intelligently combine them to produce a combinatorially large and diverse training set. The Paved2Paradise pipeline thus consists of four steps: (1) collecting copious background data, (2) recording individuals from the desired object class(es) performing different behaviors in an isolated environment (like a parking lot), (3) bootstrapping labels for the object dataset, and (4) generating samples by placing objects at arbitrary locations in backgrounds. To demonstrate the utility of Paved2Paradise, we generated synthetic datasets for two tasks: (1) human detection in orchards (a task for which no public data exists) and (2) pedestrian detection in urban environments. Qualitatively, we find that a model trained exclusively on Paved2Paradise synthetic data is highly effective at detecting humans in orchards, including when individuals are heavily occluded by tree branches. Quantitatively, a model trained on Paved2Paradise data that sources backgrounds from KITTI performs comparably to a model trained on the actual dataset. These results suggest the Paved2Paradise synthetic data pipeline can help accelerate point cloud model development in sectors where acquiring lidar datasets has previously been cost-prohibitive.
Read more4/24/2024
👨🏫
0
ParisLuco3D: A high-quality target dataset for domain generalization of LiDAR perception
Jules Sanchez, Louis Soum-Fontez, Jean-Emmanuel Deschaud, Francois Goulette
LiDAR is an essential sensor for autonomous driving by collecting precise geometric information regarding a scene. %Exploiting this information for perception is interesting as the amount of available data increases. As the performance of various LiDAR perception tasks has improved, generalizations to new environments and sensors has emerged to test these optimized models in real-world conditions. This paper provides a novel dataset, ParisLuco3D, specifically designed for cross-domain evaluation to make it easier to evaluate the performance utilizing various source datasets. Alongside the dataset, online benchmarks for LiDAR semantic segmentation, LiDAR object detection, and LiDAR tracking are provided to ensure a fair comparison across methods. The ParisLuco3D dataset, evaluation scripts, and links to benchmarks can be found at the following website:https://npm3d.fr/parisluco3d
Read more6/5/2024
0
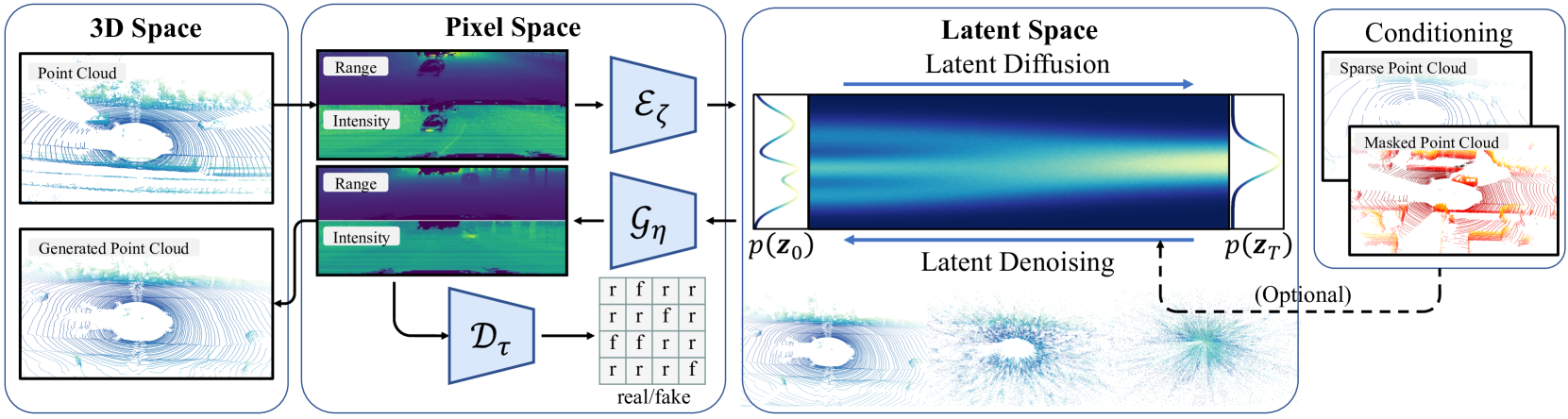
RangeLDM: Fast Realistic LiDAR Point Cloud Generation
Qianjiang Hu, Zhimin Zhang, Wei Hu
Autonomous driving demands high-quality LiDAR data, yet the cost of physical LiDAR sensors presents a significant scaling-up challenge. While recent efforts have explored deep generative models to address this issue, they often consume substantial computational resources with slow generation speeds while suffering from a lack of realism. To address these limitations, we introduce RangeLDM, a novel approach for rapidly generating high-quality range-view LiDAR point clouds via latent diffusion models. We achieve this by correcting range-view data distribution for accurate projection from point clouds to range images via Hough voting, which has a critical impact on generative learning. We then compress the range images into a latent space with a variational autoencoder, and leverage a diffusion model to enhance expressivity. Additionally, we instruct the model to preserve 3D structural fidelity by devising a range-guided discriminator. Experimental results on KITTI-360 and nuScenes datasets demonstrate both the robust expressiveness and fast speed of our LiDAR point cloud generation.
Read more9/11/2024
📊
0
Empowering Urban Traffic Management: Elevated 3D LiDAR for Data Collection and Advanced Object Detection Analysis
Nawfal Guefrachi, Hakim Ghazzai, Ahmad Alsharoa
The 3D object detection capabilities in urban environments have been enormously improved by recent developments in Light Detection and Range (LiDAR) technology. This paper presents a novel framework that transforms the detection and analysis of 3D objects in traffic scenarios by utilizing the power of elevated LiDAR sensors. We are presenting our methodology's remarkable capacity to collect complex 3D point cloud data, which allows us to accurately and in detail capture the dynamics of urban traffic. Due to the limitation in obtaining real-world traffic datasets, we utilize the simulator to generate 3D point cloud for specific scenarios. To support our experimental analysis, we firstly simulate various 3D point cloud traffic-related objects. Then, we use this dataset as a basis for training and evaluating our 3D object detection models, in identifying and monitoring both vehicles and pedestrians in simulated urban traffic environments. Next, we fine tune the Point Voxel-Region-based Convolutional Neural Network (PV-RCNN) architecture, making it more suited to handle and understand the massive volumes of point cloud data generated by our urban traffic simulations. Our results show the effectiveness of the proposed solution in accurately detecting objects in traffic scenes and highlight the role of LiDAR in improving urban safety and advancing intelligent transportation systems.
Read more5/24/2024