PEGASUS: Physically Enhanced Gaussian Splatting Simulation System for 6DoF Object Pose Dataset Generation

0

Sign in to get full access
Overview
- This paper introduces PEGASUS, a physically enhanced Gaussian splatting simulation system for generating 6DOF (6 Degrees of Freedom) object pose datasets.
- The system uses a physically-based rendering approach to create high-fidelity synthetic datasets that can be used to train robotic vision systems.
- The key innovations include a GPU-accelerated Gaussian splatting method and a physics-based simulation pipeline that accounts for object dynamics and lighting conditions.
Plain English Explanation
PEGASUS is a new tool that can create realistic 3D datasets for training robotic vision systems. It uses advanced computer graphics techniques to simulate how objects would appear from different angles and under different lighting conditions. This allows researchers to generate large, diverse datasets of object poses without having to physically capture the data.
The core idea behind PEGASUS is to use a technique called "Gaussian splatting" to efficiently render the objects. This involves representing the object's surface as a collection of overlapping Gaussian "splats" rather than a traditional mesh. This makes the rendering process much faster, while still capturing fine details.
Additionally, PEGASUS integrates a physics-based simulation to model how the objects would move and interact with their environment. This adds realism by accounting for factors like gravity, collisions, and the way light reflects off surfaces. The end result is a synthetic dataset that closely mimics real-world visual observations.
The ability to rapidly generate high-quality, 6DOF object pose data is valuable for training robotic vision systems and augmented reality applications. PEGASUS provides a flexible platform to explore novel Gaussian splatting techniques and incorporate physical dynamics into the simulation.
Technical Explanation
The key technical components of PEGASUS include:
-
Gaussian Splatting: The system represents 3D objects using a collection of Gaussian "splats" rather than a traditional mesh representation. This allows for efficient GPU-accelerated rendering while still capturing fine details.
-
Physics-based Simulation: PEGASUS integrates a physics engine to model object dynamics, including gravity, collisions, and the way light interacts with surfaces. This adds realism to the generated dataset by accounting for the physical properties of the objects.
-
Rendering Pipeline: The system uses a physically-based rendering approach to generate high-fidelity synthetic images. This includes simulating the effects of lighting, materials, and camera parameters to closely match real-world visual observations.
-
Dataset Generation: PEGASUS automates the process of generating large, diverse datasets of 6DOF object poses. This involves sampling different object configurations, lighting conditions, and camera viewpoints to create a comprehensive training set for robotic vision systems.
The paper presents a series of experiments demonstrating the efficacy of PEGASUS for generating realistic 6DOF object pose datasets. The authors compare the synthetic data to real-world observations and show that models trained on the PEGASUS dataset can achieve high performance on real-world tasks.
Critical Analysis
The PEGASUS system represents a significant advancement in the field of synthetic dataset generation for robotic vision. The authors have demonstrated the ability to create high-fidelity, physically-realistic simulations that can be used to train state-of-the-art computer vision models.
One potential limitation of the approach is the reliance on accurate physics modeling and material properties. If these aspects of the simulation are not carefully calibrated, the synthetic data may not accurately reflect the real-world observations. Additionally, the computational requirements of the physics-based rendering pipeline may limit the scalability of the system for very large-scale dataset generation.
Another area for further research could be exploring the integration of PEGASUS with structure-aware Gaussian splatting techniques or controllable Gaussian splatting to provide even finer control over the dataset generation process.
Overall, PEGASUS represents an important step forward in bridging the gap between simulated and real-world data for robotic vision applications. The authors have demonstrated the potential of physically-based rendering and Gaussian splatting to create high-quality synthetic datasets that can significantly improve the performance of computer vision models.
Conclusion
The PEGASUS system introduces a novel approach to generating 6DOF object pose datasets for robotic vision applications. By combining GPU-accelerated Gaussian splatting with physically-based simulation, the system can create realistic synthetic data that closely matches real-world observations.
This work has significant implications for the development of advanced computer vision and robotics systems, as it provides a flexible platform to rapidly create diverse, high-quality training datasets. The ability to generate synthetic data that can effectively transfer to real-world tasks is a critical enabler for the widespread adoption of robotic technologies.
As the field of computer vision and robotics continues to evolve, tools like PEGASUS will become increasingly important for driving progress and enabling new applications. The authors' work represents an important contribution to this rapidly advancing field.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
PEGASUS: Physically Enhanced Gaussian Splatting Simulation System for 6DoF Object Pose Dataset Generation
Lukas Meyer, Floris Erich, Yusuke Yoshiyasu, Marc Stamminger, Noriaki Ando, Yukiyasu Domae
We introduce Physically Enhanced Gaussian Splatting Simulation System (PEGASUS) for 6DOF object pose dataset generation, a versatile dataset generator based on 3D Gaussian Splatting. Environment and object representations can be easily obtained using commodity cameras to reconstruct with Gaussian Splatting. PEGASUS allows the composition of new scenes by merging the respective underlying Gaussian Splatting point cloud of an environment with one or multiple objects. Leveraging a physics engine enables the simulation of natural object placement within a scene through interaction between meshes extracted for the objects and the environment. Consequently, an extensive amount of new scenes - static or dynamic - can be created by combining different environments and objects. By rendering scenes from various perspectives, diverse data points such as RGB images, depth maps, semantic masks, and 6DoF object poses can be extracted. Our study demonstrates that training on data generated by PEGASUS enables pose estimation networks to successfully transfer from synthetic data to real-world data. Moreover, we introduce the Ramen dataset, comprising 30 Japanese cup noodle items. This dataset includes spherical scans that captures images from both object hemisphere and the Gaussian Splatting reconstruction, making them compatible with PEGASUS.
Read more7/16/2024
0
GS-Pose: Generalizable Segmentation-based 6D Object Pose Estimation with 3D Gaussian Splatting
Dingding Cai, Janne Heikkila, Esa Rahtu
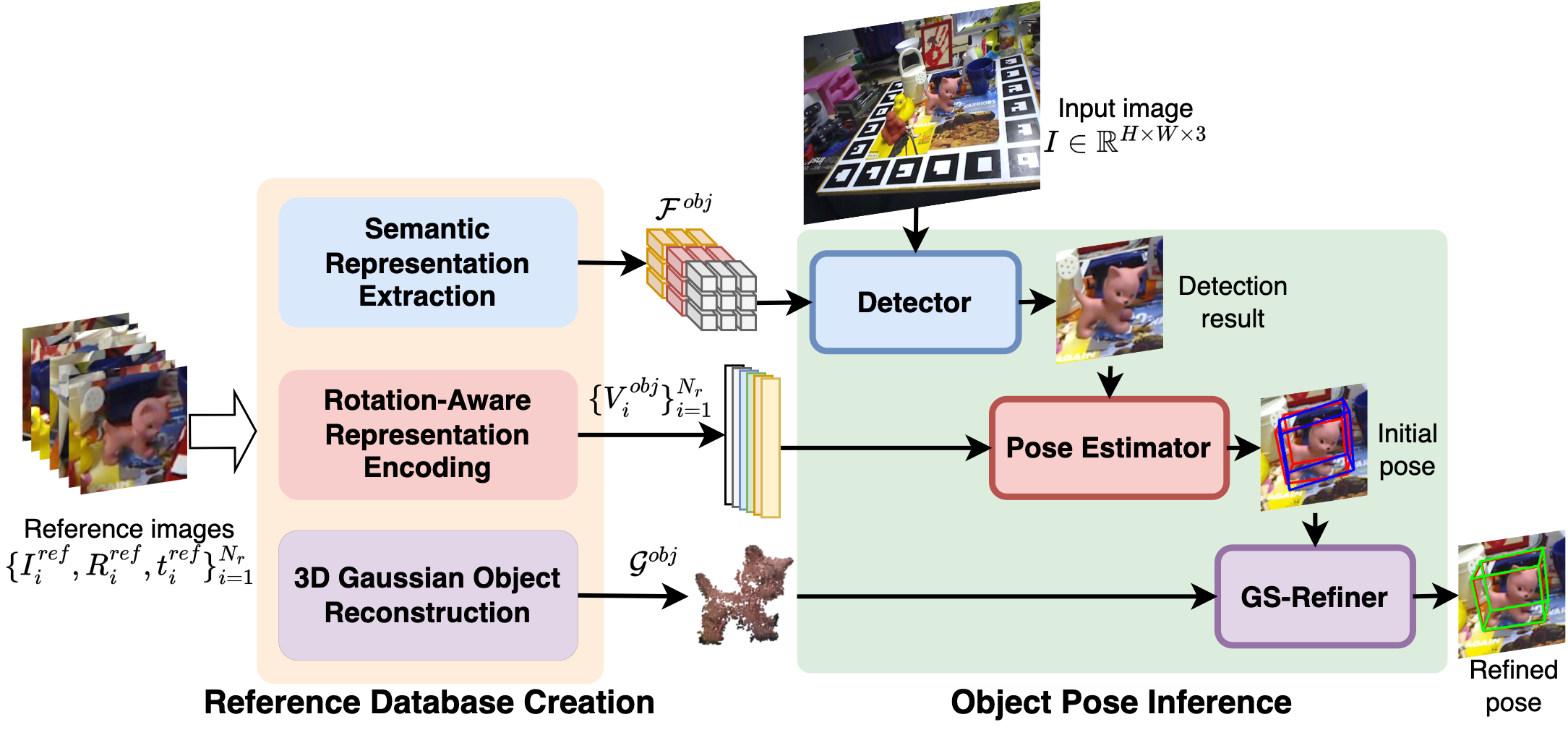
This paper introduces GS-Pose, a unified framework for localizing and estimating the 6D pose of novel objects. GS-Pose begins with a set of posed RGB images of a previously unseen object and builds three distinct representations stored in a database. At inference, GS-Pose operates sequentially by locating the object in the input image, estimating its initial 6D pose using a retrieval approach, and refining the pose with a render-and-compare method. The key insight is the application of the appropriate object representation at each stage of the process. In particular, for the refinement step, we leverage 3D Gaussian splatting, a novel differentiable rendering technique that offers high rendering speed and relatively low optimization time. Off-the-shelf toolchains and commodity hardware, such as mobile phones, can be used to capture new objects to be added to the database. Extensive evaluations on the LINEMOD and OnePose-LowTexture datasets demonstrate excellent performance, establishing the new state-of-the-art. Project page: https://dingdingcai.github.io/gs-pose.
Read more8/15/2024

0
Realistic Surgical Image Dataset Generation Based On 3D Gaussian Splatting
Tianle Zeng, Gerardo Loza Galindo, Junlei Hu, Pietro Valdastri, Dominic Jones
Computer vision technologies markedly enhance the automation capabilities of robotic-assisted minimally invasive surgery (RAMIS) through advanced tool tracking, detection, and localization. However, the limited availability of comprehensive surgical datasets for training represents a significant challenge in this field. This research introduces a novel method that employs 3D Gaussian Splatting to generate synthetic surgical datasets. We propose a method for extracting and combining 3D Gaussian representations of surgical instruments and background operating environments, transforming and combining them to generate high-fidelity synthetic surgical scenarios. We developed a data recording system capable of acquiring images alongside tool and camera poses in a surgical scene. Using this pose data, we synthetically replicate the scene, thereby enabling direct comparisons of the synthetic image quality (29.592 PSNR). As a further validation, we compared two YOLOv5 models trained on the synthetic and real data, respectively, and assessed their performance in an unseen real-world test dataset. Comparing the performances, we observe an improvement in neural network performance, with the synthetic-trained model outperforming the real-world trained model by 12%, testing both on real-world data.
Read more7/23/2024

0
6DGS: 6D Pose Estimation from a Single Image and a 3D Gaussian Splatting Model
Matteo Bortolon, Theodore Tsesmelis, Stuart James, Fabio Poiesi, Alessio Del Bue
We propose 6DGS to estimate the camera pose of a target RGB image given a 3D Gaussian Splatting (3DGS) model representing the scene. 6DGS avoids the iterative process typical of analysis-by-synthesis methods (e.g. iNeRF) that also require an initialization of the camera pose in order to converge. Instead, our method estimates a 6DoF pose by inverting the 3DGS rendering process. Starting from the object surface, we define a radiant Ellicell that uniformly generates rays departing from each ellipsoid that parameterize the 3DGS model. Each Ellicell ray is associated with the rendering parameters of each ellipsoid, which in turn is used to obtain the best bindings between the target image pixels and the cast rays. These pixel-ray bindings are then ranked to select the best scoring bundle of rays, which their intersection provides the camera center and, in turn, the camera rotation. The proposed solution obviates the necessity of an a priori pose for initialization, and it solves 6DoF pose estimation in closed form, without the need for iterations. Moreover, compared to the existing Novel View Synthesis (NVS) baselines for pose estimation, 6DGS can improve the overall average rotational accuracy by 12% and translation accuracy by 22% on real scenes, despite not requiring any initialization pose. At the same time, our method operates near real-time, reaching 15fps on consumer hardware.
Read more7/23/2024