PoseGravity: Pose Estimation from Points and Lines with Axis Prior

0
📉
Sign in to get full access
Overview
- Presents a new algorithm to estimate a camera's absolute pose using its rotation matrix
- Current algorithms use limited algebraic solutions, but this paper proposes a more efficient approach
- The solution finds the intersection of a hyperbola and the unit circle to handle various feature configurations
Plain English Explanation
This paper introduces a new way to figure out the exact position and orientation (known as "pose") of a camera, using information about how the camera is rotated. Current methods solve this problem using mathematical equations, but they have some limitations in the types of camera setups they can handle.
The key insight in this paper is that the camera's pose can be found by looking at the intersection of a special 3D shape called a "hyperbola" and the "unit circle" (which is like a sphere with a radius of 1). This allows the algorithm to work with different combinations of camera features, like points and lines, and handle cases where there aren't enough or there are too many measurements.
The paper also identifies two special situations - when the camera is looking at a flat surface, and when there's the minimum number of features needed to solve the problem. For these cases, the authors provide even simpler, closed-form solutions that are faster to compute.
Overall, this new approach is more flexible and efficient than previous methods for estimating a camera's pose from its rotation. It could be useful in applications like augmented reality, robotics, and head pose estimation.
Technical Explanation
The paper presents a new algorithm to estimate the absolute pose of a camera given its rotation matrix. Current techniques use algebraic solutions that are limited to specific input domains. In contrast, the proposed approach finds the camera's pose by computing the intersection points of a hyperbola and the unit circle.
This solution can handle various combinations of point and line features, in both minimal and overconstrained configurations. The authors also identify two special cases - planar and minimal configurations - that yield simpler closed-form solutions.
The paper includes extensive experiments to validate the effectiveness of the proposed algorithm. The results demonstrate that it outperforms existing methods in terms of accuracy and flexibility.
Critical Analysis
The paper provides a robust and efficient solution to the camera pose estimation problem, which is an important task in computer vision and robotics. The authors have identified and addressed the limitations of prior algebraic approaches by leveraging the geometric properties of the problem.
One potential area for further research could be exploring the algorithm's performance in the presence of noise or measurement errors in the input data. Additionally, the paper does not extensively compare the computational efficiency of the proposed method against other state-of-the-art techniques, which would be a valuable addition.
Overall, this work represents a valuable contribution to the field and could have significant implications for applications that rely on accurate camera pose estimation, such as augmented reality and 3D reconstruction.
Conclusion
This paper presents a new algorithm for estimating the absolute pose of a camera based on its rotation matrix. The key innovation is the use of the intersection of a hyperbola and the unit circle to handle various feature configurations, including minimal and overconstrained setups.
The proposed solution offers improved accuracy and flexibility compared to previous algebraic approaches. The identification of special cases with simpler closed-form solutions further enhances the algorithm's efficiency. These advancements could have important implications for a range of applications, from robotics to head pose estimation, where accurate and robust camera pose estimation is critical.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📉
0
PoseGravity: Pose Estimation from Points and Lines with Axis Prior
Akshay Chandrasekhar
This paper presents a new algorithm to estimate absolute camera pose given an axis of the camera's rotation matrix. Current algorithms solve the problem via algebraic solutions on limited input domains. This paper shows that the problem can be solved efficiently by finding the intersection points of a hyperbola and the unit circle. The solution can flexibly accommodate combinations of point and line features in minimal and overconstrained configurations. In addition, the two special cases of planar and minimal configurations are identified to yield simpler closed-form solutions. Extensive experiments validate the approach.
Read more9/18/2024

0
Optimal camera-robot pose estimation in linear time from points and lines
Guangyang Zeng, Biqiang Mu, Qingcheng Zeng, Yuchen Song, Chulin Dai, Guodong Shi, Junfeng Wu
Camera pose estimation is a fundamental problem in robotics. This paper focuses on two issues of interest: First, point and line features have complementary advantages, and it is of great value to design a uniform algorithm that can fuse them effectively; Second, with the development of modern front-end techniques, a large number of features can exist in a single image, which presents a potential for highly accurate robot pose estimation. With these observations, we propose AOPnP(L), an optimal linear-time camera-robot pose estimation algorithm from points and lines. Specifically, we represent a line with two distinct points on it and unify the noise model for point and line measurements where noises are added to 2D points in the image. By utilizing Plucker coordinates for line parameterization, we formulate a maximum likelihood (ML) problem for combined point and line measurements. To optimally solve the ML problem, AOPnP(L) adopts a two-step estimation scheme. In the first step, a consistent estimate that can converge to the true pose is devised by virtue of bias elimination. In the second step, a single Gauss-Newton iteration is executed to refine the initial estimate. AOPnP(L) features theoretical optimality in the sense that its mean squared error converges to the Cramer-Rao lower bound. Moreover, it owns a linear time complexity. These properties make it well-suited for precision-demanding and real-time robot pose estimation. Extensive experiments are conducted to validate our theoretical developments and demonstrate the superiority of AOPnP(L) in both static localization and dynamic odometry systems.
Read more7/24/2024
↗️
0
Efficient Solution of Point-Line Absolute Pose
Petr Hruby, Timothy Duff, Marc Pollefeys
We revisit certain problems of pose estimation based on 3D--2D correspondences between features which may be points or lines. Specifically, we address the two previously-studied minimal problems of estimating camera extrinsics from $p in { 1, 2 }$ point--point correspondences and $l=3-p$ line--line correspondences. To the best of our knowledge, all of the previously-known practical solutions to these problems required computing the roots of degree $ge 4$ (univariate) polynomials when $p=2$, or degree $ge 8$ polynomials when $p=1.$ We describe and implement two elementary solutions which reduce the degrees of the needed polynomials from $4$ to $2$ and from $8$ to $4$, respectively. We show experimentally that the resulting solvers are numerically stable and fast: when compared to the previous state-of-the art, we may obtain nearly an order of magnitude speedup. The code is available at url{https://github.com/petrhruby97/efficient_absolute}
Read more4/26/2024
0
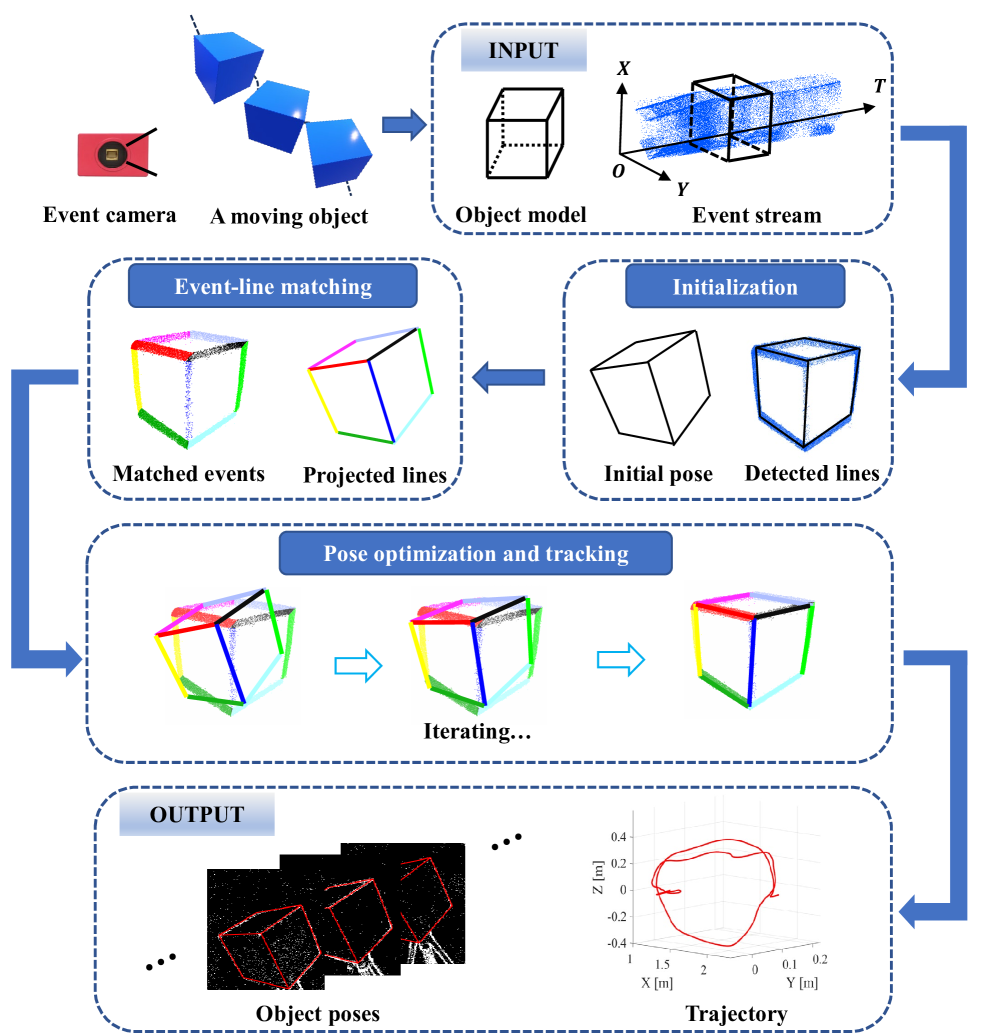
Line-based 6-DoF Object Pose Estimation and Tracking With an Event Camera
Zibin Liu, Banglei Guan, Yang Shang, Qifeng Yu, Laurent Kneip
Pose estimation and tracking of objects is a fundamental application in 3D vision. Event cameras possess remarkable attributes such as high dynamic range, low latency, and resilience against motion blur, which enables them to address challenging high dynamic range scenes or high-speed motion. These features make event cameras an ideal complement over standard cameras for object pose estimation. In this work, we propose a line-based robust pose estimation and tracking method for planar or non-planar objects using an event camera. Firstly, we extract object lines directly from events, then provide an initial pose using a globally-optimal Branch-and-Bound approach, where 2D-3D line correspondences are not known in advance. Subsequently, we utilize event-line matching to establish correspondences between 2D events and 3D models. Furthermore, object poses are refined and continuously tracked by minimizing event-line distances. Events are assigned different weights based on these distances, employing robust estimation algorithms. To evaluate the precision of the proposed methods in object pose estimation and tracking, we have devised and established an event-based moving object dataset. Compared against state-of-the-art methods, the robustness and accuracy of our methods have been validated both on synthetic experiments and the proposed dataset. The source code is available at https://github.com/Zibin6/LOPET.
Read more8/7/2024