Posterior-Variance-Based Error Quantification for Inverse Problems in Imaging

0
🏋️
Sign in to get full access
Overview
- This paper introduces a method for obtaining pixel-wise error bounds in Bayesian regularization of inverse imaging problems.
- The proposed approach uses estimates of the posterior variance and techniques from conformal prediction to provide coverage guarantees for the error bounds, without making assumptions about the underlying data distribution.
- The framework can incorporate any learned prior in a black-box manner and works even when only approximate posterior sampling is possible.
- The paper also introduces a novel primal-dual Langevin algorithm for sampling from non-smooth distributions, which is used for the numerical experiments.
Plain English Explanation
The paper presents a way to get reliable error bounds for the results of Bayesian methods that are used to solve inverse imaging problems, such as reconstructing an image from incomplete or noisy measurements. Inverse problems are challenging because there are many possible solutions that could fit the data.
Bayesian methods address this by incorporating prior knowledge about the expected properties of the solution, but the accuracy of the results can be difficult to quantify. The new approach uses estimates of the uncertainty in the Bayesian model, combined with a technique called conformal prediction, to provide guaranteed error bounds without making assumptions about the underlying data.
This is important because in many real-world applications, the true data distribution may be unknown or difficult to model. The method can also work with approximate sampling from the Bayesian model, allowing it to be used with learned priors or other complex models.
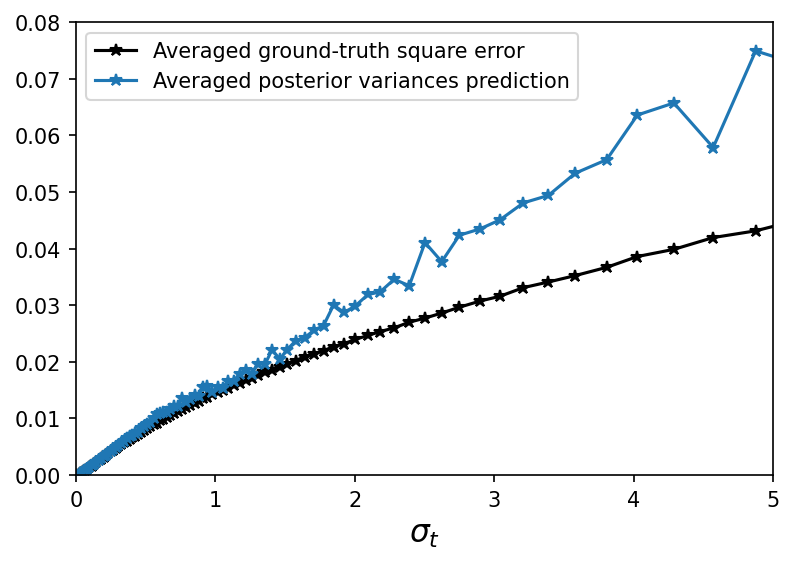
The experiments show that the error bounds obtained are often quite tight, meaning the true solution is likely to be close to the Bayesian estimate. Overall, this work provides a way to quantify the reliability of Bayesian inverse problem solutions in a robust and flexible manner.
Technical Explanation
The core of the proposed method is to use estimates of the posterior variance together with conformal prediction techniques to obtain coverage guarantees for the error bounds. Conformal prediction is a framework that provides statistical validity without making assumptions about the underlying data distribution.
By leveraging conformal prediction, the method can produce error bounds that are guaranteed to contain the true solution with a pre-specified probability, regardless of the choice of prior or the specific Bayesian regularization approach used.
Importantly, the framework can handle cases where only approximate sampling from the posterior is feasible, such as when using learned priors. This is achieved by incorporating the sampling error into the error bound estimation.
The paper also introduces a novel primal-dual Langevin algorithm for sampling from non-smooth distributions, which is used to generate samples for the numerical experiments.
Critical Analysis
The main strength of the proposed method is its ability to provide rigorous error bounds without making assumptions about the data distribution, which is a common limitation of many Bayesian approaches. This makes the technique broadly applicable to a wide range of inverse problem settings.
However, the paper acknowledges that the magnitude of the error bounds is, in general, unknown in advance. While the experiments demonstrate that the obtained error bounds are often quite tight, there may be cases where the bounds are overly conservative, potentially limiting their practical utility.
Additionally, the use of conformal prediction techniques introduces some computational overhead, which may be a consideration for applications with strict real-time requirements or limited computational resources.
Further research could explore ways to tighten the error bounds, perhaps by incorporating additional information about the problem structure or by developing more efficient conformal prediction algorithms. Investigating the method's performance on a broader range of inverse problems would also help to better understand its strengths and limitations.
Conclusion
This work presents a novel approach for obtaining reliable, pixel-wise error bounds in Bayesian regularization of inverse imaging problems. By leveraging conformal prediction techniques, the method provides coverage guarantees without making assumptions about the underlying data distribution, and can even handle cases where only approximate posterior sampling is possible.
The ability to quantify the uncertainty in Bayesian inverse problem solutions is a important step towards making these methods more accessible and trustworthy for real-world applications. The proposed framework offers a flexible and robust solution, with the potential to significantly improve the reliability and interpretability of inverse imaging results.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏋️
0
Posterior-Variance-Based Error Quantification for Inverse Problems in Imaging
Dominik Narnhofer, Andreas Habring, Martin Holler, Thomas Pock
In this work, a method for obtaining pixel-wise error bounds in Bayesian regularization of inverse imaging problems is introduced. The proposed method employs estimates of the posterior variance together with techniques from conformal prediction in order to obtain coverage guarantees for the error bounds, without making any assumption on the underlying data distribution. It is generally applicable to Bayesian regularization approaches, independent, e.g., of the concrete choice of the prior. Furthermore, the coverage guarantees can also be obtained in case only approximate sampling from the posterior is possible. With this in particular, the proposed framework is able to incorporate any learned prior in a black-box manner. Guaranteed coverage without assumptions on the underlying distributions is only achievable since the magnitude of the error bounds is, in general, unknown in advance. Nevertheless, experiments with multiple regularization approaches presented in the paper confirm that in practice, the obtained error bounds are rather tight. For realizing the numerical experiments, also a novel primal-dual Langevin algorithm for sampling from non-smooth distributions is introduced in this work.
Read more8/1/2024

0
Task-Driven Uncertainty Quantification in Inverse Problems via Conformal Prediction
Jeffrey Wen, Rizwan Ahmad, Philip Schniter
In imaging inverse problems, one seeks to recover an image from missing/corrupted measurements. Because such problems are ill-posed, there is great motivation to quantify the uncertainty induced by the measurement-and-recovery process. Motivated by applications where the recovered image is used for a downstream task, such as soft-output classification, we propose a task-centered approach to uncertainty quantification. In particular, we use conformal prediction to construct an interval that is guaranteed to contain the task output from the true image up to a user-specified probability, and we use the width of that interval to quantify the uncertainty contributed by measurement-and-recovery. For posterior-sampling-based image recovery, we construct locally adaptive prediction intervals. Furthermore, we propose to collect measurements over multiple rounds, stopping as soon as the task uncertainty falls below an acceptable level. We demonstrate our methodology on accelerated magnetic resonance imaging (MRI): https://github.com/jwen307/TaskUQ.
Read more7/15/2024
0
Improving Diffusion Models for Inverse Problems Using Optimal Posterior Covariance
Xinyu Peng, Ziyang Zheng, Wenrui Dai, Nuoqian Xiao, Chenglin Li, Junni Zou, Hongkai Xiong
Recent diffusion models provide a promising zero-shot solution to noisy linear inverse problems without retraining for specific inverse problems. In this paper, we reveal that recent methods can be uniformly interpreted as employing a Gaussian approximation with hand-crafted isotropic covariance for the intractable denoising posterior to approximate the conditional posterior mean. Inspired by this finding, we propose to improve recent methods by using more principled covariance determined by maximum likelihood estimation. To achieve posterior covariance optimization without retraining, we provide general plug-and-play solutions based on two approaches specifically designed for leveraging pre-trained models with and without reverse covariance. We further propose a scalable method for learning posterior covariance prediction based on representation with orthonormal basis. Experimental results demonstrate that the proposed methods significantly enhance reconstruction performance without requiring hyperparameter tuning.
Read more6/4/2024
🤯
0
Learning to solve Bayesian inverse problems: An amortized variational inference approach using Gaussian and Flow guides
Sharmila Karumuri, Ilias Bilionis
Inverse problems, i.e., estimating parameters of physical models from experimental data, are ubiquitous in science and engineering. The Bayesian formulation is the gold standard because it alleviates ill-posedness issues and quantifies epistemic uncertainty. Since analytical posteriors are not typically available, one resorts to Markov chain Monte Carlo sampling or approximate variational inference. However, inference needs to be rerun from scratch for each new set of data. This drawback limits the applicability of the Bayesian formulation to real-time settings, e.g., health monitoring of engineered systems, and medical diagnosis. The objective of this paper is to develop a methodology that enables real-time inference by learning the Bayesian inverse map, i.e., the map from data to posteriors. Our approach is as follows. We parameterize the posterior distribution as a function of data. This work outlines two distinct approaches to do this. The first method involves parameterizing the posterior using an amortized full-rank Gaussian guide, implemented through neural networks. The second method utilizes a Conditional Normalizing Flow guide, employing conditional invertible neural networks for cases where the target posterior is arbitrarily complex. In both approaches, we learn the network parameters by amortized variational inference which involves maximizing the expectation of evidence lower bound over all possible datasets compatible with the model. We demonstrate our approach by solving a set of benchmark problems from science and engineering. Our results show that the posterior estimates of our approach are in agreement with the corresponding ground truth obtained by Markov chain Monte Carlo. Once trained, our approach provides the posterior distribution for a given observation just at the cost of a forward pass of the neural network.
Read more5/28/2024