QoS Aware Mixed-Criticality Task Scheduling in Vehicular Edge Cloud System

0
Sign in to get full access
Overview
- This paper presents a scheduling algorithm for managing mixed-criticality tasks in a vehicular edge cloud system.
- The goal is to ensure Quality of Service (QoS) for high-priority tasks while efficiently utilizing computing resources.
- The system considers tasks with different levels of criticality, deadlines, and QoS requirements.
Plain English Explanation
In a modern transportation system, vehicles are equipped with various sensors and computing devices. These elements can form an "edge cloud" system, where computing power is distributed across the vehicles and roadside infrastructure. This allows for more efficient and responsive processing of data, which is crucial for safety-critical applications like autonomous driving.
However, managing the computing resources in this edge cloud can be challenging. Different tasks, such as collision detection, traffic monitoring, and entertainment services, may have varying levels of importance and time sensitivity. The scheduling algorithm proposed in this paper aims to address this by intelligently allocating resources to ensure that the most critical tasks are completed on time, while still allowing for less urgent tasks to be processed.
The key idea is to categorize tasks into different "criticality" levels, based on factors like their impact on safety and the consequences of missing their deadlines. The scheduling algorithm then prioritizes the high-criticality tasks, ensuring they are completed within their specified time frames. At the same time, it tries to maximize the overall utilization of the available computing power, so that lower-priority tasks can also be executed effectively.
This balanced approach allows the vehicular edge cloud system to maintain a high level of service quality for the most important tasks, while still providing a good user experience for less critical applications. It's an important step towards more secure and efficient data management in complex, mobility-aware transportation systems.
Technical Explanation
The paper proposes a QoS-aware mixed-criticality task scheduling algorithm for a vehicular edge cloud system. The system consists of three main components: vehicular units (VUs), road-side units (RSUs), and edge servers.
The authors categorize tasks into different criticality levels, with high-criticality tasks being the most important (e.g., collision detection) and low-criticality tasks being less time-sensitive (e.g., entertainment services). Each task also has a deadline and a QoS requirement.
The scheduling algorithm aims to maximize the number of high-criticality tasks that meet their deadlines, while also trying to improve the overall QoS for lower-criticality tasks. It does this by dynamically allocating computing resources across the VUs, RSUs, and edge servers, taking into account the task characteristics and the current system load.
The authors evaluate their approach through simulation experiments, comparing it to other scheduling schemes. The results show that their algorithm outperforms the alternatives in terms of meeting deadlines for high-criticality tasks and improving the overall QoS.
Critical Analysis
The paper presents a well-designed scheduling algorithm that addresses an important challenge in vehicular edge cloud systems. By prioritizing high-criticality tasks and efficiently utilizing computing resources, the proposed approach can help ensure the safety and reliability of autonomous driving and other transportation-related applications.
However, the paper does not discuss some potential limitations or areas for further research. For example, it does not address how the system would handle sudden changes in task arrival patterns or unexpected spikes in computing demand. Additionally, the simulation-based evaluation could be complemented by real-world experiments to validate the algorithm's performance in more realistic scenarios.
Furthermore, the paper could have explored the implications of its approach on broader societal issues, such as the potential impact on user privacy or the ethical considerations of prioritizing certain tasks over others. These are important factors to consider as vehicular edge cloud systems become more prevalent.
Conclusion
This paper introduces a innovative scheduling algorithm for managing mixed-criticality tasks in a vehicular edge cloud system. By prioritizing high-criticality tasks and efficiently utilizing computing resources, the proposed approach can help ensure the quality of service for critical transportation applications, while still accommodating less time-sensitive tasks.
The research represents an important step towards more robust and reliable transportation systems that can leverage the power of distributed computing. As autonomous driving and other mobility-related technologies continue to evolve, the lessons learned from this work can inform the design of future edge cloud architectures and resource management strategies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
QoS Aware Mixed-Criticality Task Scheduling in Vehicular Edge Cloud System
Suvarthi Sarkar, Aditya Trivedi, Ritish Bansal, Aryabartta Sahu
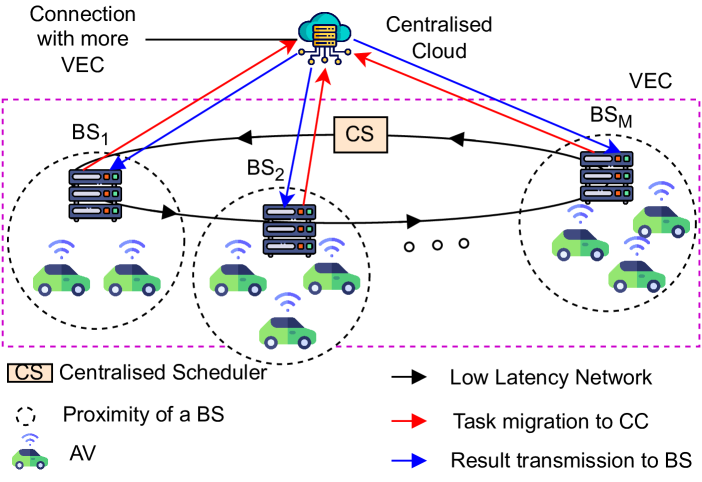
Modern-day cars are equipped with numerous cameras and sensors, typically integrated with advanced decision-control systems that enable the vehicle to perceive its surroundings and navigate autonomously. Efficient processing of data from sensors, lidars, radars and cameras is quite computationally intensive and can not be done with good accuracy using less capable onboard resources. In order to deal with this problem, some computation requirements (also referred as tasks) are offloaded to infrastructure or executed in parallel in both autonomous vehicle (AV) and infrastructure to enhance accuracy. The infrastructure comprises base stations, a centralized cloud, and a CS. Base stations (BSs) execute tasks in collaboration with a significantly more powerful centralized cloud, while the centralised scheduler (CS) centrally schedules all the tasks. The base station receives tasks from multiple AVs, each with varying deadlines, criticality, and locations. Our main goal is to maximize the profit of the infrastructure by (a) minimizing the number of drop tasks, (b) minimizing the distance cost for task offloading, and (c) minimizing the energy usage of BSs. In this work, we proposed efficient approaches to schedule the collection of tasks to the BSs, by employing a hybrid scheduling approach where tasks from AVs get allocated to nearby base stations if the nearby BSs are lightly loaded, otherwise AVs send the task to CS for allocation. The CS maximizes the profit by following strategies: (a) selection of BS considering distance and energy consumption, (b) when task load is moderate or low, highly critical tasks run at favourable utilisation, and (c) low-critical tasks are dropped to free up resources for executing high-critical tasks. Based on our experiments, proposed approaches improved the QoS provided by up to 25% compared to the state-of-the-art approach in real-life datasets.
Read more7/23/2024
0
Quality-Aware Task Offloading for Cooperative Perception in Vehicular Edge Computing
Amr M. Zaki, Sara A. Elsayed, Khalid Elgazzar, Hossam S. Hassanein
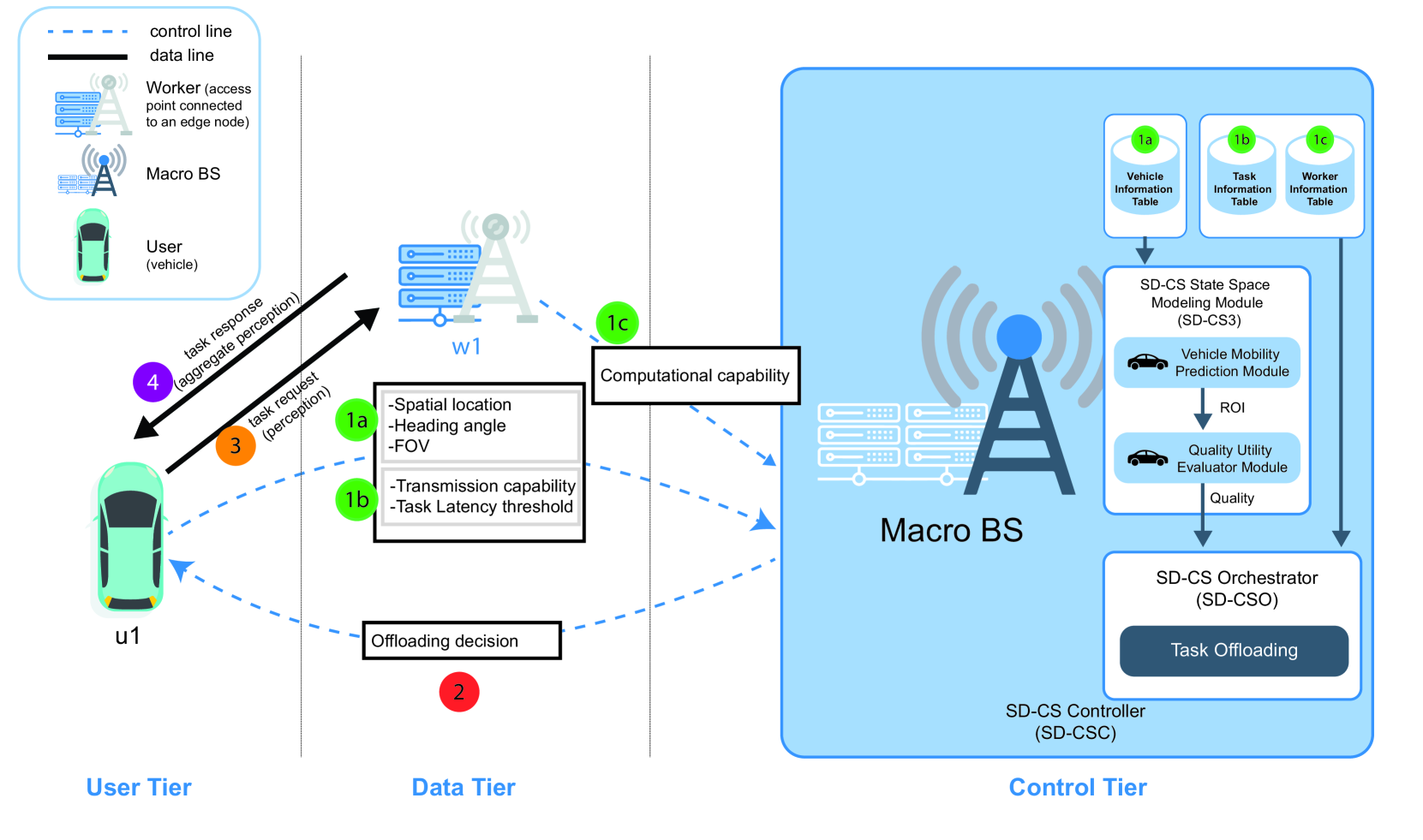
Task offloading in Vehicular Edge Computing (VEC) can advance cooperative perception (CP) to improve traffic awareness in Autonomous Vehicles. In this paper, we propose the Quality-aware Cooperative Perception Task Offloading (QCPTO) scheme. Q-CPTO is the first task offloading scheme that enhances traffic awareness by prioritizing the quality rather than the quantity of cooperative perception. Q-CPTO improves the quality of CP by curtailing perception redundancy and increasing the Value of Information (VOI) procured by each user. We use Kalman filters (KFs) for VOI assessment, predicting the next movement of each vehicle to estimate its region of interest. The estimated VOI is then integrated into the task offloading problem. We formulate the task offloading problem as an Integer Linear Program (ILP) that maximizes the VOI of users and reduces perception redundancy by leveraging the spatially diverse fields of view (FOVs) of vehicles, while adhering to strict latency requirements. We also propose the Q-CPTO-Heuristic (Q-CPTOH) scheme to solve the task offloading problem in a time-efficient manner. Extensive evaluations show that Q-CPTO significantly outperforms prominent task offloading schemes by up to 14% and 20% in terms of response delay and traffic awareness, respectively. Furthermore, Q-CPTO-H closely approaches the optimal solution, with marginal gaps of up to 1.4% and 2.1% in terms of traffic awareness and the number of collaborating users, respectively, while reducing the runtime by up to 84%.
Read more6/3/2024
0
When `Computing follows Vehicles': Decentralized Mobility-Aware Resource Allocation in the Edge-to-Cloud Continuum
Zeinab Nezami, Emmanouil Chaniotakis, Evangelos Pournaras
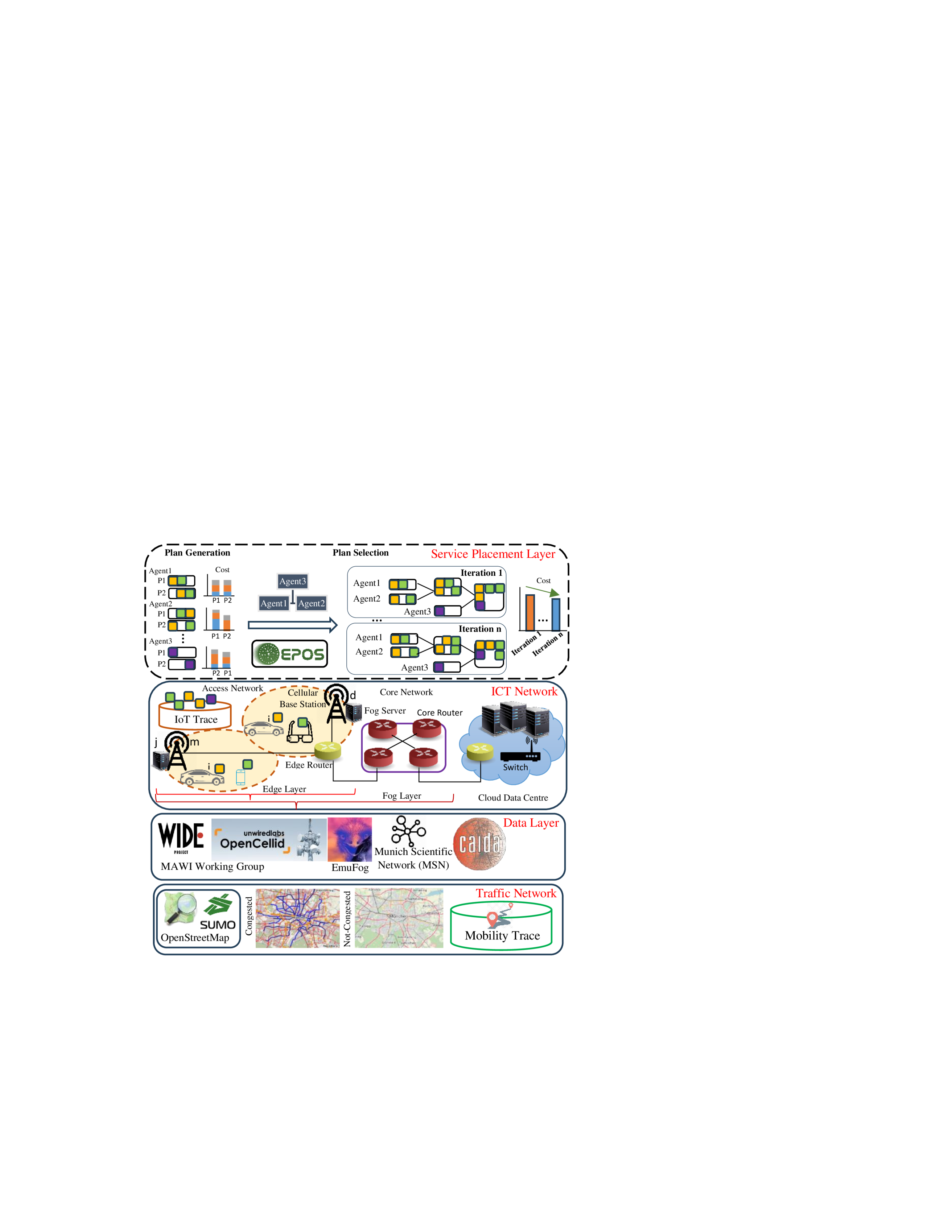
The transformation of smart mobility is unprecedented--Autonomous, shared and electric connected vehicles, along with the urgent need to meet ambitious net-zero targets by shifting to low-carbon transport modalities result in new traffic patterns and requirements for real-time computation at large-scale, for instance, augmented reality applications. The cloud computing paradigm can neither respond to such low-latency requirements nor adapt resource allocation to such dynamic spatio-temporal service requests. This paper addresses this grand challenge by introducing a novel decentralized optimization framework for mobility-aware edge-to-cloud resource allocation, service offloading, provisioning and load-balancing. In contrast to related work, this framework comes with superior efficiency and cost-effectiveness under evaluation in real-world traffic settings and mobility datasets. This breakthrough capability of 'computing follows vehicles' proves able to reduce utilization variance by more than 40 times, while preventing service deadline violations by 14%-34%.
Read more5/7/2024
0
Communication-Aware Consistent Edge Selection for Mobile Users and Autonomous Vehicles
Nazish Tahir, Ramviyas Parasuraman, Haijian Sun
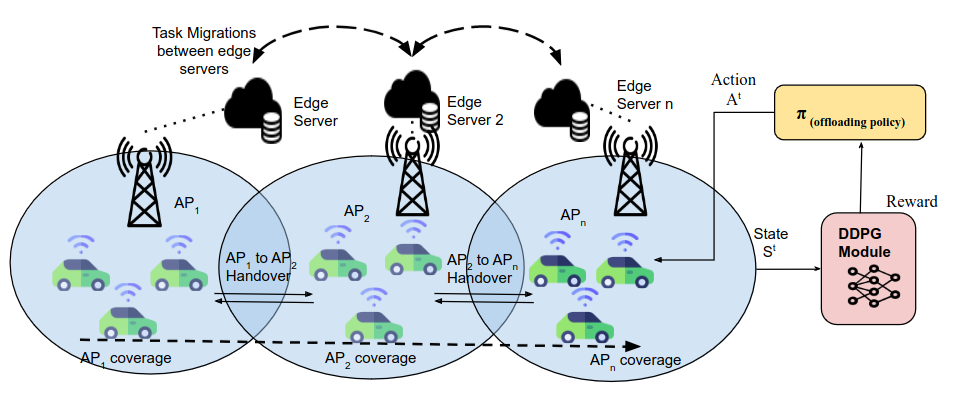
Offloading time-sensitive, computationally intensive tasks-such as advanced learning algorithms for autonomous driving-from vehicles to nearby edge servers, vehicle-to-infrastructure (V2I) systems, or other collaborating vehicles via vehicle-to-vehicle (V2V) communication enhances service efficiency. However, whence traversing the path to the destination, the vehicle's mobility necessitates frequent handovers among the access points (APs) to maintain continuous and uninterrupted wireless connections to maintain the network's Quality of Service (QoS). These frequent handovers subsequently lead to task migrations among the edge servers associated with the respective APs. This paper addresses the joint problem of task migration and access-point handover by proposing a deep reinforcement learning framework based on the Deep Deterministic Policy Gradient (DDPG) algorithm. A joint allocation method of communication and computation of APs is proposed to minimize computational load, service latency, and interruptions with the overarching goal of maximizing QoS. We implement and evaluate our proposed framework on simulated experiments to achieve smooth and seamless task switching among edge servers, ultimately reducing latency.
Read more8/9/2024