Quick and Accurate Affordance Learning

0
📉
Sign in to get full access
Overview
- Infants actively learn about their environment and how their behavior can affect it, shaping their own learning experiences.
- The paper presents a deep learning architecture that models this type of active learning behavior, mediating between global exploration and local affordance learning.
- The model uses different measures of uncertainty to guide the simulated agent's exploration and acquisition of affordance-related knowledge.
Plain English Explanation
Babies are natural learners. They don't just passively observe the world around them - they actively explore and interact with their environment, figuring out how things work and how their own actions can influence what happens. This paper proposes a deep learning model that tries to mimic this kind of active learning behavior.
The key idea is that the model doesn't just passively learn about the environment. Instead, it actively navigates around, trying to find areas where it can learn the most new information. It uses different ways of measuring "uncertainty" - how much it still has to learn - to decide where to explore next. This helps the model balance exploring unknown areas while also focusing on the most valuable learning opportunities.
For example, the model might notice that an area has a lot of unpredictable, random events happening (called "aleatoric uncertainty"). But rather than just exploring that area, the model would prioritize areas where it's missing key knowledge about how things work (called "epistemic uncertainty"). This helps the model build a more complete and useful understanding of its environment.
Overall, this research suggests that active, goal-directed exploration is a key part of how infants and other intelligent agents can efficiently learn about their world. By taking an active role in shaping their own learning experiences, they can discover important affordances - the ways their behaviors can interact with and affect their environment.
Technical Explanation
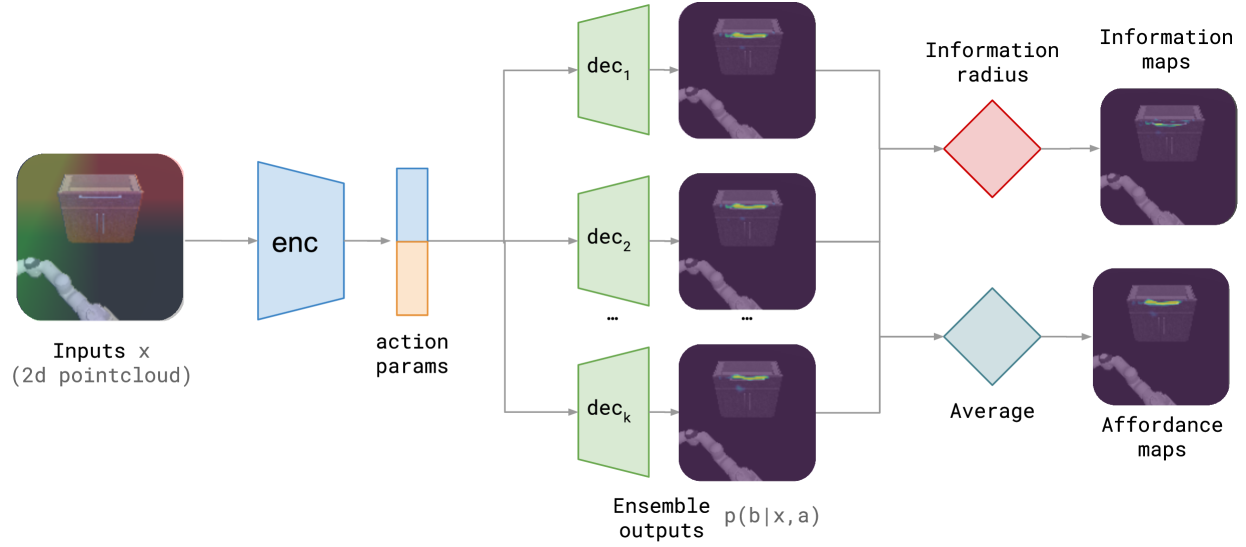
The paper presents a deep learning architecture that models the active learning behavior observed in infants as they explore their environments. The key components of the architecture are:
-
Navigation Behavior: The model coordinates global navigation to explore the environment with local motor behaviors that enable active affordance learning. This allows the agent to actively seek out opportunities to learn about how its actions can affect the world around it.
-
Affordance Encoding: Affordances, or the relationship between an agent's abilities and the environment's features, are encoded locally. This allows the model to acquire generalized knowledge about affordances that can be applied in novel situations.
-
Active Exploration: The model uses different measures of "uncertainty" to guide its exploration and learning. It compares the predicted uncertainty of a single model, the standard deviation between multiple models, and the Jensen-Shannon Divergence between multiple models. The JSD measure is found to provide the most balanced exploration strategy, as it focuses learning on epistemic uncertainty rather than being misled by inherent environmental randomness.
The authors suggest that this type of active, goal-directed learning architecture, which coordinates navigation, motor behavior, and uncertainty-guided exploration, could be a key ingredient for enabling efficient robotic manipulation and potentially modeling active play in children.
Critical Analysis
The paper presents a novel and interesting approach to modeling active learning behavior in artificial agents. However, the authors acknowledge that the work is still quite abstract and lacks connection to more realistic developmental scenarios. Future research would need to collaborate with developmental psychology to ground the model in actual infant behavior and learning processes.
Additionally, the paper focuses on a single agent learning in isolation. It would be valuable to explore how this type of active learning architecture could be extended to social contexts, where infants learn by observing and interacting with others. Incorporating social learning mechanisms could lead to richer and more realistic models of cognitive development.
Overall, the paper makes a valuable contribution by demonstrating the potential benefits of actively-guided exploration and learning. However, significant work remains to translate these insights into practical applications and to better align the model with the complexities of real-world infant learning.
Conclusion
This paper presents a deep learning architecture that aims to capture the active, goal-directed learning behaviors observed in infants as they explore their environments. By coordinating navigation, motor behavior, and uncertainty-guided exploration, the model is able to efficiently discover and learn about the affordances - the ways its actions can interact with and affect the world around it.
The authors suggest that this type of active learning approach could have important implications for developing more capable and adaptable robotic systems, as well as for modeling the cognitive development of children. However, the work is still quite abstract, and future research will need to collaborate with developmental psychology to ground the model in more realistic scenarios and social contexts.
Overall, this paper provides a thought-provoking perspective on the role of active learning in cognitive development and artificial intelligence, and highlights the potential benefits of a more agentic, exploratory approach to machine learning.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📉
0
Quick and Accurate Affordance Learning
Fedor Scholz, Erik Ayari, Johannes Bertram, Martin V. Butz
Infants learn actively in their environments, shaping their own learning curricula. They learn about their environments' affordances, that is, how local circumstances determine how their behavior can affect the environment. Here we model this type of behavior by means of a deep learning architecture. The architecture mediates between global cognitive map exploration and local affordance learning. Inference processes actively move the simulated agent towards regions where they expect affordance-related knowledge gain. We contrast three measures of uncertainty to guide this exploration: predicted uncertainty of a model, standard deviation between the means of several models (SD), and the Jensen-Shannon Divergence (JSD) between several models. We show that the first measure gets fooled by aleatoric uncertainty inherent in the environment, while the two other measures focus learning on epistemic uncertainty. JSD exhibits the most balanced exploration strategy. From a computational perspective, our model suggests three key ingredients for coordinating the active generation of learning curricula: (1) Navigation behavior needs to be coordinated with local motor behavior for enabling active affordance learning. (2) Affordances need to be encoded locally for acquiring generalized knowledge. (3) Effective active affordance learning mechanisms should use density comparison techniques for estimating expected knowledge gain. Future work may seek collaborations with developmental psychology to model active play in children in more realistic scenarios.
Read more5/14/2024
🤖
0
Uncertainty-driven Affordance Discovery for Efficient Robotics Manipulation
Pietro Mazzaglia, Taco Cohen, Daniel Dijkman
Robotics affordances, providing information about what actions can be taken in a given situation, can aid robotics manipulation. However, learning about affordances requires expensive large annotated datasets of interactions or demonstrations. In this work, we show active learning can mitigate this problem and propose the use of uncertainty to drive an interactive affordance discovery process. We show that our method enables the efficient discovery of visual affordances for several action primitives, such as grasping, stacking objects, or opening drawers, strongly improving data efficiency and allowing us to learn grasping affordances on a real-world setup with an xArm 6 robot arm in a small number of trials.
Read more6/6/2024
0
Information-driven Affordance Discovery for Efficient Robotic Manipulation
Pietro Mazzaglia, Taco Cohen, Daniel Dijkman
Robotic affordances, providing information about what actions can be taken in a given situation, can aid robotic manipulation. However, learning about affordances requires expensive large annotated datasets of interactions or demonstrations. In this work, we argue that well-directed interactions with the environment can mitigate this problem and propose an information-based measure to augment the agent's objective and accelerate the affordance discovery process. We provide a theoretical justification of our approach and we empirically validate the approach both in simulation and real-world tasks. Our method, which we dub IDA, enables the efficient discovery of visual affordances for several action primitives, such as grasping, stacking objects, or opening drawers, strongly improving data efficiency in simulation, and it allows us to learn grasping affordances in a small number of interactions, on a real-world setup with a UFACTORY XArm 6 robot arm.
Read more6/7/2024

0
Learning Precise Affordances from Egocentric Videos for Robotic Manipulation
Gen Li, Nikolaos Tsagkas, Jifei Song, Ruaridh Mon-Williams, Sethu Vijayakumar, Kun Shao, Laura Sevilla-Lara
Affordance, defined as the potential actions that an object offers, is crucial for robotic manipulation tasks. A deep understanding of affordance can lead to more intelligent AI systems. For example, such knowledge directs an agent to grasp a knife by the handle for cutting and by the blade when passing it to someone. In this paper, we present a streamlined affordance learning system that encompasses data collection, effective model training, and robot deployment. First, we collect training data from egocentric videos in an automatic manner. Different from previous methods that focus only on the object graspable affordance and represent it as coarse heatmaps, we cover both graspable (e.g., object handles) and functional affordances (e.g., knife blades, hammer heads) and extract data with precise segmentation masks. We then propose an effective model, termed Geometry-guided Affordance Transformer (GKT), to train on the collected data. GKT integrates an innovative Depth Feature Injector (DFI) to incorporate 3D shape and geometric priors, enhancing the model's understanding of affordances. To enable affordance-oriented manipulation, we further introduce Aff-Grasp, a framework that combines GKT with a grasp generation model. For comprehensive evaluation, we create an affordance evaluation dataset with pixel-wise annotations, and design real-world tasks for robot experiments. The results show that GKT surpasses the state-of-the-art by 15.9% in mIoU, and Aff-Grasp achieves high success rates of 95.5% in affordance prediction and 77.1% in successful grasping among 179 trials, including evaluations with seen, unseen objects, and cluttered scenes.
Read more8/20/2024