RaSim: A Range-aware High-fidelity RGB-D Data Simulation Pipeline for Real-world Applications

0

Sign in to get full access
Overview
- This paper presents RaSim, a high-fidelity RGB-D data simulation pipeline designed for real-world applications.
- RaSim aims to generate realistic synthetic RGB-D data that can be used to train and evaluate computer vision models, particularly for tasks that rely on depth information.
- The pipeline incorporates range-aware rendering to accurately simulate the characteristics of real-world depth sensors, such as sensor noise, limited range, and depth distortion.
Plain English Explanation
RaSim: A Range-aware High-fidelity RGB-D Data Simulation Pipeline for Real-world Applications is a research project that developed a new system for creating realistic simulated RGB-D (color and depth) data. RGB-D data, which includes both color and depth information, is widely used in computer vision applications like 3D reconstruction, object recognition, and robot navigation.
The key innovation of RaSim is that it takes into account the limitations and characteristics of real-world depth sensors when generating the synthetic data. Depth sensors, like those found in cameras or lidar systems, have a limited range, can be noisy, and may distort the depth measurements, especially at longer distances. RaSim aims to mimic these properties to create RGB-D data that is more representative of what a real sensor would capture.
By generating high-fidelity synthetic RGB-D data, RaSim can be used to train and evaluate computer vision models without the need for extensive real-world data collection. This can save time and resources, especially for applications that require diverse and challenging data. The simulated data can also be used to test the robustness of models in scenarios that may be difficult or dangerous to capture in the real world.
Technical Explanation
RaSim: A Range-aware High-fidelity RGB-D Data Simulation Pipeline for Real-world Applications presents a novel RGB-D data simulation pipeline that focuses on accurately modeling the characteristics of real-world depth sensors. The key elements of the RaSim system include:
-
Range-aware Rendering: RaSim incorporates range-aware rendering techniques to simulate the limited range and depth distortion of real-world depth sensors. This includes modeling sensor noise, depth falloff, and other artifacts that can occur at different distances from the sensor.
-
Physically-based Material Modeling: RaSim uses physically-based material models to generate realistic surface reflections and appearances, which are crucial for generating high-fidelity RGB data.
-
Sensor Simulation: The pipeline simulates the specific properties of depth sensors, such as their field of view, resolution, and noise profiles, to ensure the synthetic data closely matches real-world sensor data.
-
Diverse Scene Generation: RaSim includes a scene generation module that can create a wide variety of 3D environments and object configurations, allowing for the creation of diverse and challenging RGB-D datasets.
The authors demonstrate the effectiveness of RaSim through a series of experiments, showing that models trained on RaSim data can achieve competitive performance on real-world benchmarks compared to models trained on limited real-world data. The paper also highlights the potential of RaSim to support the development of robust computer vision systems for real-world applications.
Critical Analysis
The RaSim pipeline presents a promising approach for generating high-fidelity synthetic RGB-D data, but it is essential to consider the limitations and potential issues associated with this research.
One key limitation is that the accuracy of the simulated data is heavily dependent on the fidelity of the underlying 3D models, material properties, and sensor models used in the pipeline. While the authors demonstrate the realism of the generated data, further validation may be needed to ensure that the synthetic data accurately captures the full complexity of real-world scenes and sensor characteristics.
Additionally, the paper does not provide a detailed analysis of the computational and resource requirements of the RaSim pipeline, which may be an important consideration for its practical deployment, especially for large-scale data generation.
It would also be valuable to see the performance of models trained on RaSim data evaluated on a wider range of real-world benchmarks and applications, to better understand the generalizability and limitations of the approach.
Conclusion
RaSim: A Range-aware High-fidelity RGB-D Data Simulation Pipeline for Real-world Applications presents a novel and promising approach for generating synthetic RGB-D data that closely mimics the characteristics of real-world depth sensors. By incorporating range-aware rendering, physically-based material modeling, and diverse scene generation, RaSim has the potential to significantly improve the development and evaluation of computer vision models for a wide range of real-world applications.
While the paper demonstrates the effectiveness of RaSim, further research is needed to address the potential limitations and ensure the long-term viability of the approach. Nonetheless, the work represents an important step forward in leveraging simulation to support the advancement of computer vision and robotics technologies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
RaSim: A Range-aware High-fidelity RGB-D Data Simulation Pipeline for Real-world Applications
Xingyu Liu, Chenyangguang Zhang, Gu Wang, Ruida Zhang, Xiangyang Ji
In robotic vision, a de-facto paradigm is to learn in simulated environments and then transfer to real-world applications, which poses an essential challenge in bridging the sim-to-real domain gap. While mainstream works tackle this problem in the RGB domain, we focus on depth data synthesis and develop a range-aware RGB-D data simulation pipeline (RaSim). In particular, high-fidelity depth data is generated by imitating the imaging principle of real-world sensors. A range-aware rendering strategy is further introduced to enrich data diversity. Extensive experiments show that models trained with RaSim can be directly applied to real-world scenarios without any finetuning and excel at downstream RGB-D perception tasks.
Read more4/8/2024
0
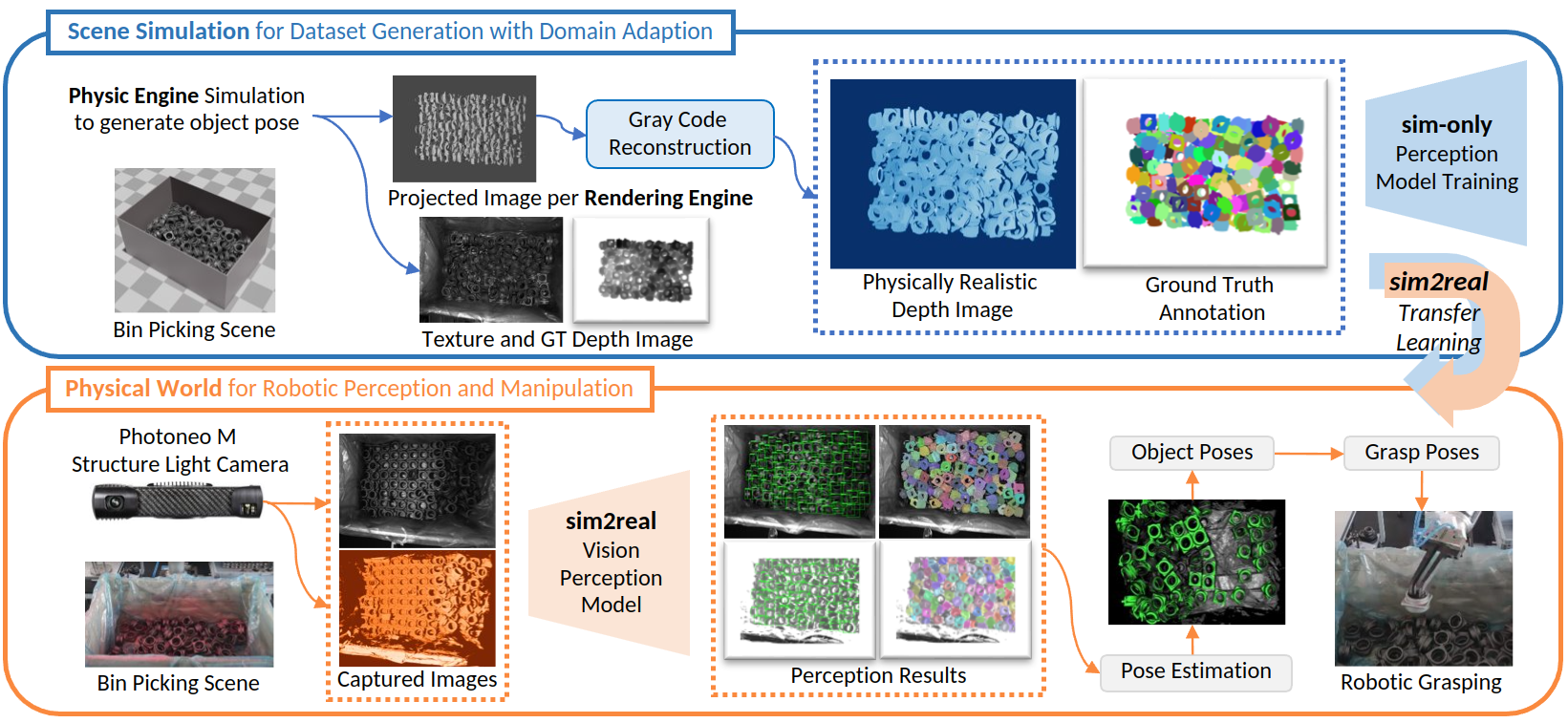
Close the Sim2real Gap via Physically-based Structured Light Synthetic Data Simulation
Kaixin Bai, Lei Zhang, Zhaopeng Chen, Fang Wan, Jianwei Zhang
Despite the substantial progress in deep learning, its adoption in industrial robotics projects remains limited, primarily due to challenges in data acquisition and labeling. Previous sim2real approaches using domain randomization require extensive scene and model optimization. To address these issues, we introduce an innovative physically-based structured light simulation system, generating both RGB and physically realistic depth images, surpassing previous dataset generation tools. We create an RGBD dataset tailored for robotic industrial grasping scenarios and evaluate it across various tasks, including object detection, instance segmentation, and embedding sim2real visual perception in industrial robotic grasping. By reducing the sim2real gap and enhancing deep learning training, we facilitate the application of deep learning models in industrial settings. Project details are available at https://baikaixinpublic.github.io/structured light 3D synthesizer/.
Read more7/18/2024
0
RadSimReal: Bridging the Gap Between Synthetic and Real Data in Radar Object Detection With Simulation
Oded Bialer, Yuval Haitman
Object detection in radar imagery with neural networks shows great potential for improving autonomous driving. However, obtaining annotated datasets from real radar images, crucial for training these networks, is challenging, especially in scenarios with long-range detection and adverse weather and lighting conditions where radar performance excels. To address this challenge, we present RadSimReal, an innovative physical radar simulation capable of generating synthetic radar images with accompanying annotations for various radar types and environmental conditions, all without the need for real data collection. Remarkably, our findings demonstrate that training object detection models on RadSimReal data and subsequently evaluating them on real-world data produce performance levels comparable to models trained and tested on real data from the same dataset, and even achieves better performance when testing across different real datasets. RadSimReal offers advantages over other physical radar simulations that it does not necessitate knowledge of the radar design details, which are often not disclosed by radar suppliers, and has faster run-time. This innovative tool has the potential to advance the development of computer vision algorithms for radar-based autonomous driving applications.
Read more4/30/2024

0
Uplifting Range-View-based 3D Semantic Segmentation in Real-Time with Multi-Sensor Fusion
Shiqi Tan, Hamidreza Fazlali, Yixuan Xu, Yuan Ren, Bingbing Liu
Range-View(RV)-based 3D point cloud segmentation is widely adopted due to its compact data form. However, RV-based methods fall short in providing robust segmentation for the occluded points and suffer from distortion of projected RGB images due to the sparse nature of 3D point clouds. To alleviate these problems, we propose a new LiDAR and Camera Range-view-based 3D point cloud semantic segmentation method (LaCRange). Specifically, a distortion-compensating knowledge distillation (DCKD) strategy is designed to remedy the adverse effect of RV projection of RGB images. Moreover, a context-based feature fusion module is introduced for robust and preservative sensor fusion. Finally, in order to address the limited resolution of RV and its insufficiency of 3D topology, a new point refinement scheme is devised for proper aggregation of features in 2D and augmentation of point features in 3D. We evaluated the proposed method on large-scale autonomous driving datasets ie SemanticKITTI and nuScenes. In addition to being real-time, the proposed method achieves state-of-the-art results on nuScenes benchmark
Read more7/16/2024