Are NeRFs ready for autonomous driving? Towards closing the real-to-simulation gap
2403.16092
0
0

Abstract
Neural Radiance Fields (NeRFs) have emerged as promising tools for advancing autonomous driving (AD) research, offering scalable closed-loop simulation and data augmentation capabilities. However, to trust the results achieved in simulation, one needs to ensure that AD systems perceive real and rendered data in the same way. Although the performance of rendering methods is increasing, many scenarios will remain inherently challenging to reconstruct faithfully. To this end, we propose a novel perspective for addressing the real-to-simulated data gap. Rather than solely focusing on improving rendering fidelity, we explore simple yet effective methods to enhance perception model robustness to NeRF artifacts without compromising performance on real data. Moreover, we conduct the first large-scale investigation into the real-to-simulated data gap in an AD setting using a state-of-the-art neural rendering technique. Specifically, we evaluate object detectors and an online mapping model on real and simulated data, and study the effects of different fine-tuning strategies.Our results show notable improvements in model robustness to simulated data, even improving real-world performance in some cases. Last, we delve into the correlation between the real-to-simulated gap and image reconstruction metrics, identifying FID and LPIPS as strong indicators. See https://research.zenseact.com/publications/closing-real2sim-gap for our project page.
Create account to get full access
Overview
- This paper explores the use of Neural Radiance Fields (NeRFs) for autonomous driving applications.
- The researchers investigate the "real-to-simulation gap" - the challenge of bridging the difference between synthetic simulation environments and the real world.
- They propose techniques to improve the performance of NeRFs in autonomous driving scenarios, with the goal of enabling more accurate and reliable perception for self-driving cars.
Plain English Explanation
NeRFs are a type of 3D modeling technology that can create highly detailed, photorealistic representations of objects and environments. The researchers in this paper wanted to see if NeRFs could be used effectively in autonomous driving systems, which rely on accurate perception of the real-world environment around the vehicle.
One of the key challenges is the "real-to-simulation gap" - the fact that simulated environments, even highly detailed ones, don't perfectly match the complexities of the actual physical world. The paper explores ways to bridge this gap and make NeRFs more robust and reliable for autonomous driving use cases.
Some of the techniques they investigate include using real-world datasets to train the NeRF models, and fusing the NeRF data with other sensor inputs like lidar and inertial measurement. They also look at ways to connect the NeRF representations to other modalities like images and text to improve the accuracy and robustness of the system.
Overall, the goal is to make NeRFs a viable and reliable technology for autonomous driving, where accurate perception of the environment is critical for safe and effective vehicle operation.
Technical Explanation
The paper proposes several techniques to improve the performance of NeRFs for autonomous driving tasks and close the "real-to-simulation gap":
-
Real-world dataset: The researchers train the NeRF models using real-world datasets instead of synthetic data, to better capture the complexities of the physical environment.
-
Sensor fusion: They explore fusing the NeRF data with other sensor inputs like lidar and inertial measurement to improve the overall robustness and accuracy of the perception system.
-
Cross-modal connections: The paper investigates ways to connect the NeRF representations to other modalities like images and text, leveraging the complementary strengths of these different data sources.
-
Visual relocalization: The researchers propose a NeRF-based visual relocalization system to enable robust localization of the vehicle within the environment.
-
Photorealistic simulation: Finally, the paper explores the use of NeRFs to create photorealistic simulation environments for closed-loop testing of autonomous driving systems.
Through these various techniques, the researchers aim to demonstrate the feasibility and potential of NeRFs for autonomous driving applications, ultimately bridging the gap between simulated environments and the real world.
Critical Analysis
The paper presents a compelling case for the use of NeRFs in autonomous driving, but also acknowledges several caveats and limitations:
- The real-world dataset used for training the NeRF models may not be comprehensive enough to capture the full diversity of driving environments and scenarios.
- Sensor fusion with lidar and inertial measurement can improve robustness, but the integration of these different data sources may still have challenges, especially in complex or dynamic environments.
- Connecting NeRFs to other modalities like images and text is a promising approach, but the researchers note that the cross-modal learning algorithms need further development to be truly effective.
- The visual relocalization system based on NeRFs may struggle in situations with significant changes to the environment, such as construction or seasonal variations.
- The photorealistic simulation environments created with NeRFs, while highly detailed, may not fully capture all the nuances and unpredictability of the real world.
Overall, the paper demonstrates the potential of NeRFs for autonomous driving, but also highlights the need for continued research and development to address these remaining challenges and limitations.
Conclusion
This paper explores the use of Neural Radiance Fields (NeRFs) for autonomous driving applications, with a focus on bridging the "real-to-simulation gap" that has historically been a challenge in this domain. The researchers propose a range of techniques, including the use of real-world datasets, sensor fusion, cross-modal connections, visual relocalization, and photorealistic simulation, to improve the performance and reliability of NeRFs in autonomous driving scenarios.
While the paper presents promising results and highlights the potential of NeRFs for this application, it also acknowledges several caveats and areas for further research. Continued development and refinement of these techniques will be crucial to fully realize the benefits of NeRFs in autonomous driving and enable more accurate and robust perception for self-driving cars.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
NeuRAD: Neural Rendering for Autonomous Driving
Adam Tonderski, Carl Lindstrom, Georg Hess, William Ljungbergh, Lennart Svensson, Christoffer Petersson
0
0
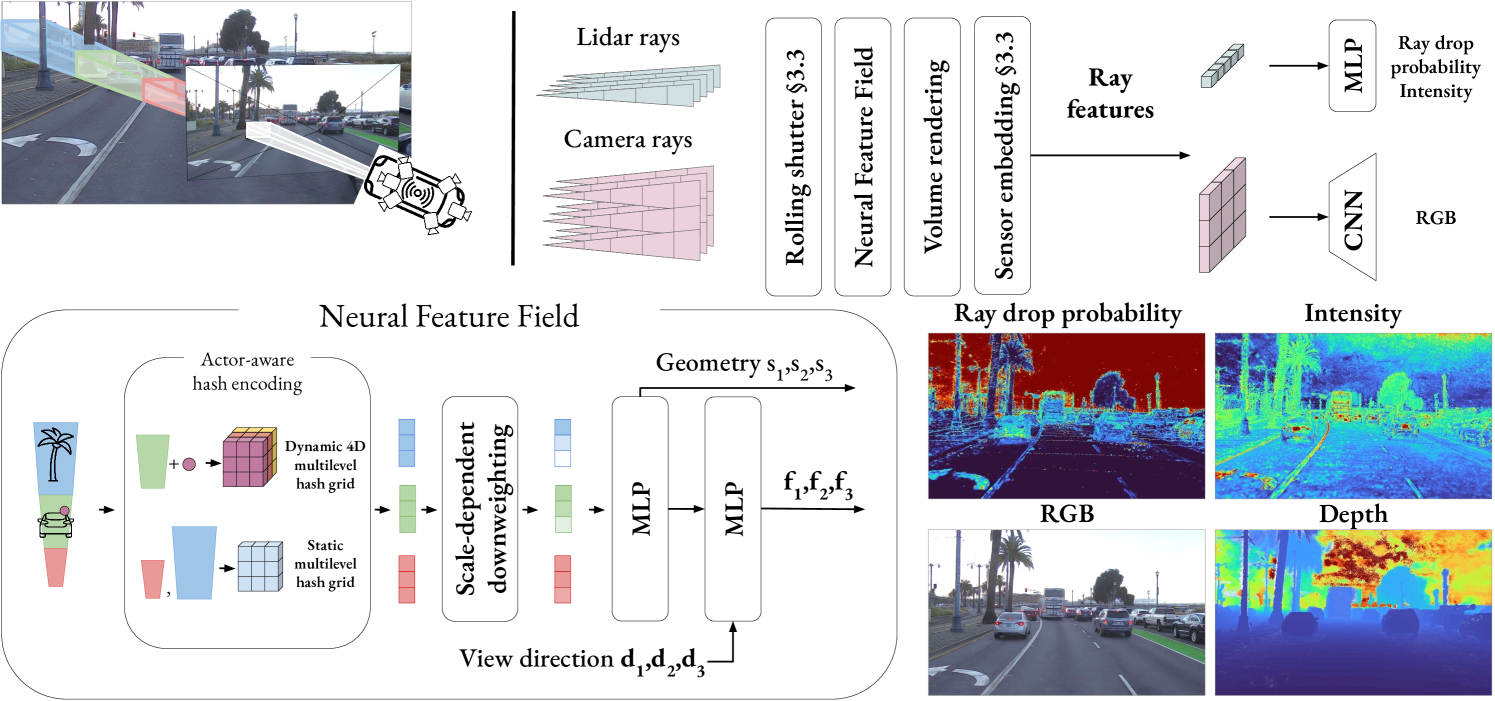
Neural radiance fields (NeRFs) have gained popularity in the autonomous driving (AD) community. Recent methods show NeRFs' potential for closed-loop simulation, enabling testing of AD systems, and as an advanced training data augmentation technique. However, existing methods often require long training times, dense semantic supervision, or lack generalizability. This, in turn, hinders the application of NeRFs for AD at scale. In this paper, we propose NeuRAD, a robust novel view synthesis method tailored to dynamic AD data. Our method features simple network design, extensive sensor modeling for both camera and lidar -- including rolling shutter, beam divergence and ray dropping -- and is applicable to multiple datasets out of the box. We verify its performance on five popular AD datasets, achieving state-of-the-art performance across the board. To encourage further development, we will openly release the NeuRAD source code. See https://github.com/georghess/NeuRAD .
4/19/2024
DriveEnv-NeRF: Exploration of A NeRF-Based Autonomous Driving Environment for Real-World Performance Validation
Mu-Yi Shen, Chia-Chi Hsu, Hao-Yu Hou, Yu-Chen Huang, Wei-Fang Sun, Chia-Che Chang, Yu-Lun Liu, Chun-Yi Lee
0
0
In this study, we introduce the DriveEnv-NeRF framework, which leverages Neural Radiance Fields (NeRF) to enable the validation and faithful forecasting of the efficacy of autonomous driving agents in a targeted real-world scene. Standard simulator-based rendering often fails to accurately reflect real-world performance due to the sim-to-real gap, which represents the disparity between virtual simulations and real-world conditions. To mitigate this gap, we propose a workflow for building a high-fidelity simulation environment of the targeted real-world scene using NeRF. This approach is capable of rendering realistic images from novel viewpoints and constructing 3D meshes for emulating collisions. The validation of these capabilities through the comparison of success rates in both simulated and real environments demonstrates the benefits of using DriveEnv-NeRF as a real-world performance indicator. Furthermore, the DriveEnv-NeRF framework can serve as a training environment for autonomous driving agents under various lighting conditions. This approach enhances the robustness of the agents and reduces performance degradation when deployed to the target real scene, compared to agents fully trained using the standard simulator rendering pipeline.
5/31/2024
Neural Radiance Field in Autonomous Driving: A Survey
Lei He, Leheng Li, Wenchao Sun, Zeyu Han, Yichen Liu, Sifa Zheng, Jianqiang Wang, Keqiang Li
0
0
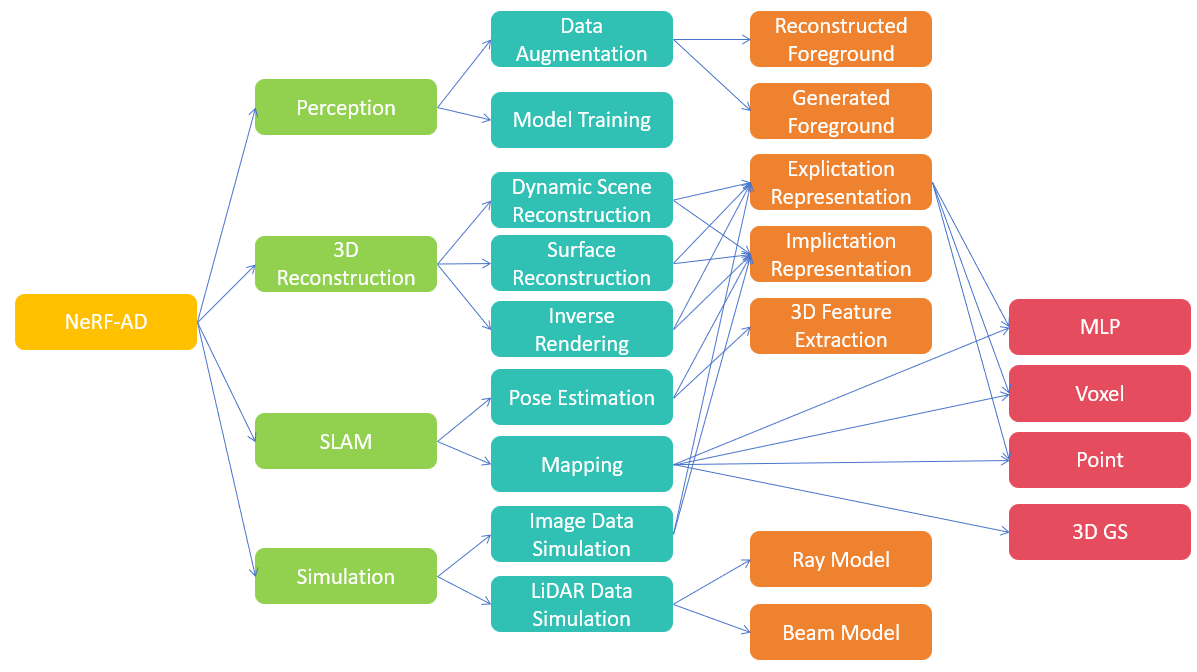
Neural Radiance Field (NeRF) has garnered significant attention from both academia and industry due to its intrinsic advantages, particularly its implicit representation and novel view synthesis capabilities. With the rapid advancements in deep learning, a multitude of methods have emerged to explore the potential applications of NeRF in the domain of Autonomous Driving (AD). However, a conspicuous void is apparent within the current literature. To bridge this gap, this paper conducts a comprehensive survey of NeRF's applications in the context of AD. Our survey is structured to categorize NeRF's applications in Autonomous Driving (AD), specifically encompassing perception, 3D reconstruction, simultaneous localization and mapping (SLAM), and simulation. We delve into in-depth analysis and summarize the findings for each application category, and conclude by providing insights and discussions on future directions in this field. We hope this paper serves as a comprehensive reference for researchers in this domain. To the best of our knowledge, this is the first survey specifically focused on the applications of NeRF in the Autonomous Driving domain.
4/29/2024
🧠
Benchmarking Neural Radiance Fields for Autonomous Robots: An Overview
Yuhang Ming, Xingrui Yang, Weihan Wang, Zheng Chen, Jinglun Feng, Yifan Xing, Guofeng Zhang
0
0
Neural Radiance Fields (NeRF) have emerged as a powerful paradigm for 3D scene representation, offering high-fidelity renderings and reconstructions from a set of sparse and unstructured sensor data. In the context of autonomous robotics, where perception and understanding of the environment are pivotal, NeRF holds immense promise for improving performance. In this paper, we present a comprehensive survey and analysis of the state-of-the-art techniques for utilizing NeRF to enhance the capabilities of autonomous robots. We especially focus on the perception, localization and navigation, and decision-making modules of autonomous robots and delve into tasks crucial for autonomous operation, including 3D reconstruction, segmentation, pose estimation, simultaneous localization and mapping (SLAM), navigation and planning, and interaction. Our survey meticulously benchmarks existing NeRF-based methods, providing insights into their strengths and limitations. Moreover, we explore promising avenues for future research and development in this domain. Notably, we discuss the integration of advanced techniques such as 3D Gaussian splatting (3DGS), large language models (LLM), and generative AIs, envisioning enhanced reconstruction efficiency, scene understanding, decision-making capabilities. This survey serves as a roadmap for researchers seeking to leverage NeRFs to empower autonomous robots, paving the way for innovative solutions that can navigate and interact seamlessly in complex environments.
5/10/2024