Reactive Composition of UAV Delivery Services in Urban Environments

0
🤔
Sign in to get full access
Overview
- Proposes a novel failure-aware reactive UAV delivery service composition framework
- Presents a skyway network infrastructure for effective service provisioning in urban areas
- Develops algorithms to reduce search space and perform reactive service compositions when a service failure occurs
- Evaluates the approach using real drone dataset experiments
Plain English Explanation
This research paper introduces a new system for managing drone-based delivery services in urban areas. The key idea is to create a "skyway network" - a network of designated routes and landing zones that drones can use to safely and efficiently deliver packages.
The researchers developed several algorithms to help the delivery system react quickly when a drone experiences a failure or issue during a delivery. These algorithms can quickly find an alternative drone or delivery route to complete the delivery, reducing disruptions for customers.
The researchers tested their system using real-world drone data and found that it was effective at maintaining reliable drone deliveries, even when issues occurred. This could be an important step towards making drone deliveries a more practical and dependable option for urban areas.
The proposed skyway network infrastructure and reactive service composition algorithms aim to improve the reliability and security of UAV-enabled delivery services in urban environments.
Technical Explanation
The paper proposes a framework for reactive UAV (drone) delivery service composition that can handle failures. It starts by presenting a skyway network infrastructure for effective service provisioning in urban areas. This provides designated routes and landing zones for drones to follow.
The researchers then develop a formal model for drone delivery services and a system architecture to enable reactive service compositions. They create three algorithms to efficiently manage service compositions:
- Radius-based algorithm: Searches for alternative drones within a certain radius of the failed delivery.
- Cell density-based algorithm: Groups the service area into cells and searches for alternatives in the highest density cells first.
- Two-phased algorithm: First searches locally, then expands the search if no alternatives are found.
The team evaluated their approach using a real-world drone dataset. The experiments demonstrated the effectiveness of the proposed reactive service composition framework in maintaining reliable drone deliveries, even when failures occur.
The paper builds on prior work in secure UAV communications, UAV placement optimization, and UAV telemetry and monitoring.
Critical Analysis
The paper presents a comprehensive framework for reactive drone delivery service composition, which is an important step towards making drone deliveries more reliable and practical in urban areas. The proposed skyway network infrastructure and service composition algorithms appear to be well-designed and effective based on the experimental results.
However, the paper does not address some potential limitations or areas for further research. For example, it does not consider the impact of weather conditions, air traffic, or other environmental factors that could disrupt drone deliveries. Additionally, the scalability of the system as the number of drones and delivery requests increases is not thoroughly explored.
Further research could investigate integrating weather and environmental data into the service composition algorithms, as well as testing the framework's performance under high-demand scenarios. Exploring the security implications of the skyway network infrastructure would also be a valuable area of study.
Overall, this paper presents a promising approach to improving the reliability of drone delivery services, but additional research is needed to fully understand the system's capabilities and limitations.
Conclusion
This research paper introduces a novel framework for reactive UAV delivery service composition that can handle failures. By creating a skyway network infrastructure and developing efficient service composition algorithms, the researchers have demonstrated a practical approach to maintaining reliable drone deliveries in urban areas.
The proposed system's ability to quickly find alternative drones or delivery routes when issues occur is a significant advancement in making drone deliveries a more dependable option. While further research is needed to address potential limitations, this work represents an important step towards the wider adoption of drone-based delivery services in cities.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤔
0
Reactive Composition of UAV Delivery Services in Urban Environments
Woojin Lee, Babar Shahzaad, Balsam Alkouz, Athman Bouguettaya
We propose a novel failure-aware reactive UAV delivery service composition framework. A skyway network infrastructure is presented for the effective provisioning of services in urban areas. We present a formal drone delivery service model and a system architecture for reactive drone delivery services. We develop radius-based, cell density-based, and two-phased algorithms to reduce the search space and perform reactive service compositions when a service failure occurs. We conduct a set of experiments with a real drone dataset to demonstrate the effectiveness of our proposed approach.
Read more4/30/2024
0
A Hybrid Reactive Routing Protocol for Decentralized UAV Networks
Shivam Garg, Alexander Ihler, Elizabeth Serena Bentley, Sunil Kumar
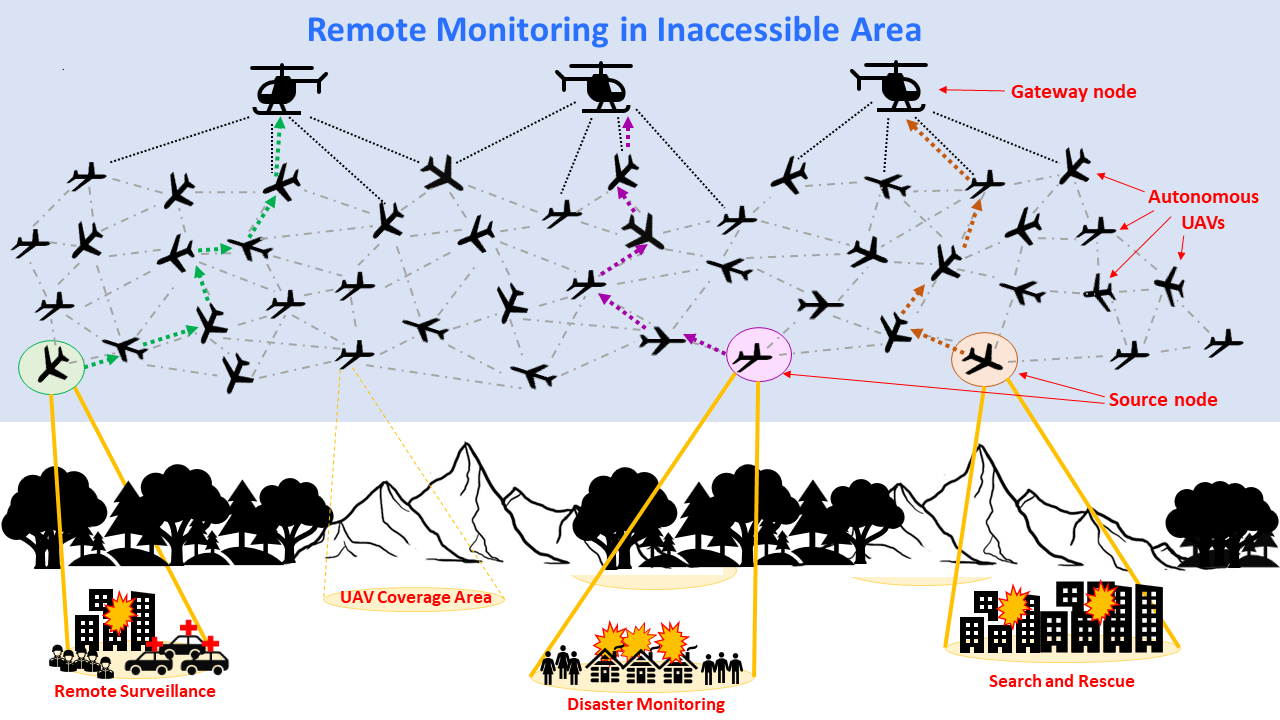
Wireless networks consisting of low SWaP, FW-UAVs are used in many applications, such as monitoring, search and surveillance of inaccessible areas. A decentralized and autonomous approach ensures robustness to failures; the UAVs explore and sense within the area and forward their information, in a multihop manner, to nearby aerial gateway nodes. However, the unpredictable nature of the events, relatively high speed of UAVs, and dynamic UAV trajectories cause the network topology to change significantly over time, resulting in frequent route breaks. A holistic routing approach is needed to support multiple traffic flows in these networks to provide mobility- and congestion-aware, high-quality routes when needed, with low control and computational overheads, using the information collected in a distributed manner. Existing routing schemes do not address all the mentioned issues. We present a hybrid reactive routing protocol for decentralized UAV networks. Our scheme searches routes on-demand, monitors a region around the selected route (the pipe), and proactively switches to an alternative route before the current route's quality degrades below a threshold. We empirically evaluate the impact of pipe width and node density on our ability to find alternate high-quality routes within the pipe and the overhead required to maintain the pipe. Compared to existing reactive routing schemes, our approach achieves higher throughput and reduces the number of route discoveries, overhead, and resulting flow interruptions at different traffic loads, node densities and speeds. Despite having limited network topology information, and low overhead and route computation complexity, our proposed scheme achieves superior throughput to proactive optimized link state routing scheme at different network and traffic settings. We also evaluate the relative performance of reactive and proactive routing schemes.
Read more7/4/2024

0
Resilient UAVs Location Sharing Service Based on Information Freshness and Opportunistic Deliveries
Agnaldo Batista, Aldri Santos
Unmanned aerial vehicles (UAV) have been recognized as a versatile platform for a wide range of services. During the flight, these vehicles must avoid collisions to operate safely. In this way, they demand to keep spatial awareness, i.e., to know others in their coverage area. However, mobility and positioning aspects hamper building UAV network infrastructure to support reliable basic services. Thus, such vehicles call for a location service with up-to-date information resilient to false location injection threats. This work proposes FlySafe, a resilient UAVs location sharing service that employs opportunistic approaches to deliver UAVs' location. FlySafe takes into account the freshness of UAVs' location to maintain their spatial awareness. Further, it counts on the age of the UAV's location information to trigger device discovery. Simulation results showed that FlySafe achieved spatial awareness up to 94.15% of UAV operations, being resilient to~false locations injected in the network. Moreover, the accuracy in device discovery achieved 94.53% with a location error of less than 2 m.
Read more9/18/2024

0
Multi-UAV Multi-RIS QoS-Aware Aerial Communication Systems using DRL and PSO
Marwan Dhuheir, Aiman Erbad, Ala Al-Fuqaha, Mohsen Guizani
Recently, Unmanned Aerial Vehicles (UAVs) have attracted the attention of researchers in academia and industry for providing wireless services to ground users in diverse scenarios like festivals, large sporting events, natural and man-made disasters due to their advantages in terms of versatility and maneuverability. However, the limited resources of UAVs (e.g., energy budget and different service requirements) can pose challenges for adopting UAVs for such applications. Our system model considers a UAV swarm that navigates an area, providing wireless communication to ground users with RIS support to improve the coverage of the UAVs. In this work, we introduce an optimization model with the aim of maximizing the throughput and UAVs coverage through optimal path planning of UAVs and multi-RIS phase configurations. The formulated optimization is challenging to solve using standard linear programming techniques, limiting its applicability in real-time decision-making. Therefore, we introduce a two-step solution using deep reinforcement learning and particle swarm optimization. We conduct extensive simulations and compare our approach to two competitive solutions presented in the recent literature. Our simulation results demonstrate that our adopted approach is 20 % better than the brute-force approach and 30% better than the baseline solution in terms of QoS.
Read more6/26/2024