PRO-MIND: Proximity and Reactivity Optimisation of robot Motion to tune safety limits, human stress, and productivity in INDustrial settings

0

Sign in to get full access
Overview
- The provided paper presents the PRO-MIND⋆ framework, which aims to optimize robot motion in industrial settings to balance safety, human stress, and productivity.
- It explores techniques for proximity and reactivity optimization to find the right balance between these competing objectives.
- The paper covers the design, implementation, and evaluation of the PRO-MIND⋆ framework.
Plain English Explanation
The PRO-MIND⋆ framework is a system designed to help industrial robots move in a way that keeps workers safe, reduces their stress, and maintains high productivity.
The key challenge is that these goals can sometimes conflict. For example, robots that move very slowly to avoid collisions may keep workers safe, but they could also make the work take much longer and cause frustration. Robots that zip around quickly might be more productive, but could startle or even collide with nearby workers.
The PRO-MIND⋆ framework tries to find the right balance between these competing priorities. It uses techniques like proximity optimization and reactivity optimization to tune the robot's motion in a way that keeps workers comfortable and productive while still maintaining safety.
For example, the system might predict where workers are likely to move and plan the robot's path accordingly. Or it could adjust the robot's speed and acceleration to feel less jarring and intrusive. The goal is to create a collaborative work environment where humans and robots can work together effectively.
Technical Explanation
The PRO-MIND⋆ framework focuses on optimizing robot motion in industrial settings to balance three key objectives: safety, human stress, and productivity.
The framework uses proximity optimization techniques to predict the future locations of workers and plan robot motions that maintain a safe distance. This helps avoid collisions and keep workers feeling comfortable. The system also leverages reactivity optimization to adjust the robot's speed, acceleration, and other motion parameters in a way that feels natural and unobtrusive to nearby workers.
By carefully tuning these motion parameters, the PRO-MIND⋆ framework aims to find the sweet spot between the competing goals of safety, human stress, and productivity. Experiments showed that the system could significantly improve worker comfort and productivity compared to traditional industrial robot control approaches.
Critical Analysis
The PRO-MIND⋆ paper presents a well-designed framework for optimizing robot motion in a way that balances multiple, often conflicting objectives. The emphasis on safety, human stress, and productivity is an important step towards creating more collaborative human-robot workspaces.
However, the paper does acknowledge some limitations of the current approach. For example, the human motion prediction models used may not always be accurate, especially in dynamic or unpredictable environments. Additionally, the reactivity optimization techniques rely on specific parameters that may need to be tuned for different industrial settings.
Further research could explore ways to make the human motion prediction more robust and integrate uncertainty awareness into the planning process. Exploring more proactive and legible robot planning strategies could also help improve the robot's ability to anticipate and accommodate human behaviors.
Conclusion
The PRO-MIND⋆ framework represents an important step towards creating industrial robot systems that can operate safely and comfortably alongside human workers. By optimizing robot motion to balance safety, human stress, and productivity, the system aims to foster more effective human-robot collaboration in industrial settings.
While the current approach has some limitations, the underlying principles and techniques explored in this paper could have significant implications for the future of human-centered robotics. As robots become more ubiquitous in our workplaces and daily lives, developing systems that can seamlessly integrate with and support human activities will be crucial.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
PRO-MIND: Proximity and Reactivity Optimisation of robot Motion to tune safety limits, human stress, and productivity in INDustrial settings
Marta Lagomarsino, Marta Lorenzini, Elena De Momi, Arash Ajoudani
Despite impressive advancements of industrial collaborative robots, their potential remains largely untapped due to the difficulty in balancing human safety and comfort with fast production constraints. To help address this challenge, we present PRO-MIND, a novel human-in-the-loop framework that leverages valuable data about the human co-worker to optimise robot trajectories. By estimating human attention and mental effort, our method dynamically adjusts safety zones and enables on-the-fly alterations of the robot path to enhance human comfort and optimal stopping conditions. Moreover, we formulate a multi-objective optimisation to adapt the robot's trajectory execution time and smoothness based on the current human psycho-physical stress, estimated from heart rate variability and frantic movements. These adaptations exploit the properties of B-spline curves to preserve continuity and smoothness, which are crucial factors in improving motion predictability and comfort. Evaluation in two realistic case studies showcases the framework's ability to restrain the operators' workload and stress and to ensure their safety while enhancing human-robot productivity. Further strengths of PRO-MIND include its adaptability to each individual's specific needs and sensitivity to variations in attention, mental effort, and stress during task execution.
Read more9/12/2024
0
New!Real-Time Adaptive Industrial Robots: Improving Safety And Comfort In Human-Robot Collaboration
Damian Hostettler, Simon Mayer, Jan Liam Albert, Kay Erik Jenss, Christian Hildebrand
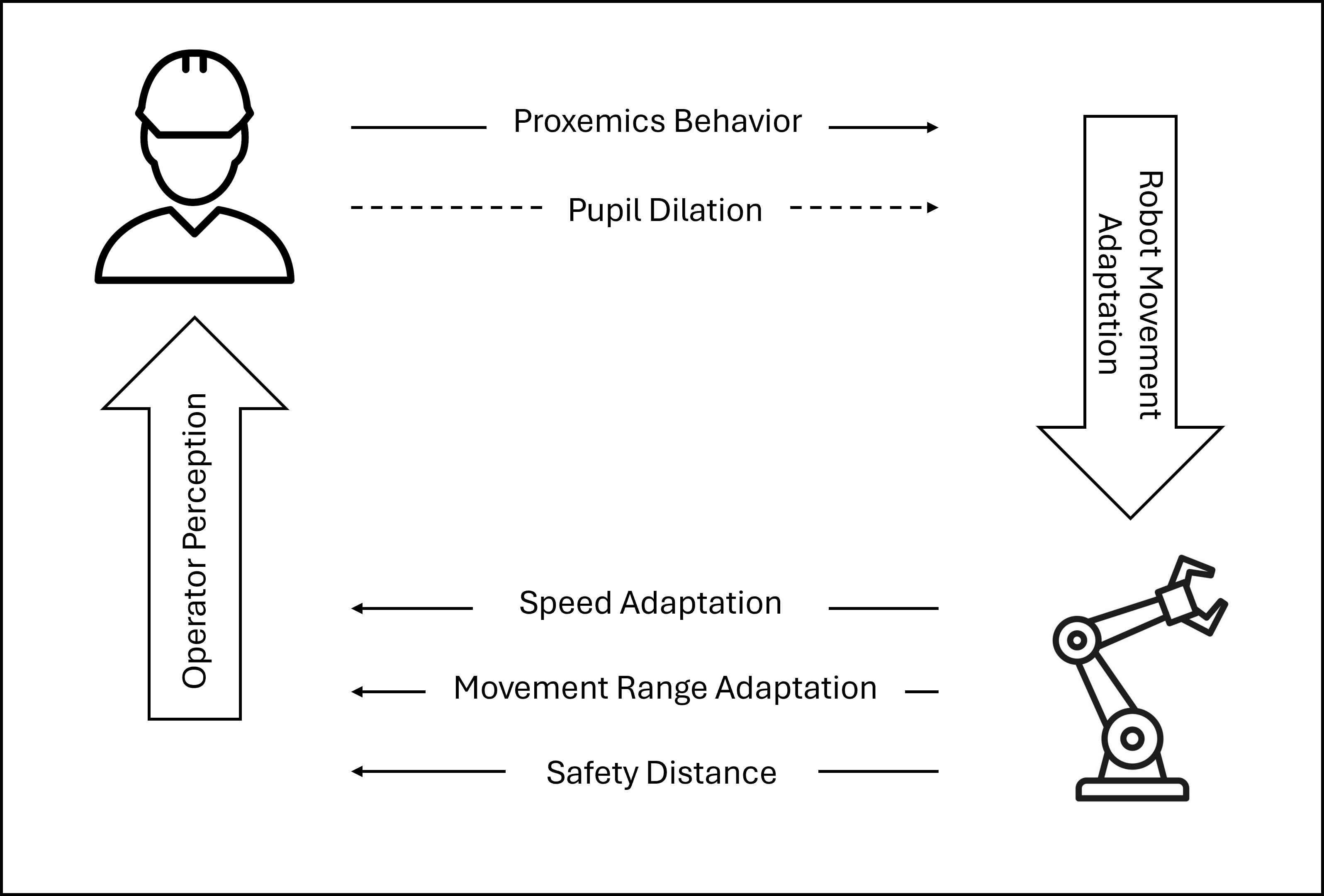
Industrial robots become increasingly prevalent, resulting in a growing need for intuitive, comforting human-robot collaboration. We present a user-aware robotic system that adapts to operator behavior in real time while non-intrusively monitoring physiological signals to create a more responsive and empathetic environment. Our prototype dynamically adjusts robot speed and movement patterns while measuring operator pupil dilation and proximity. Our user study compares this adaptive system to a non-adaptive counterpart, and demonstrates that the adaptive system significantly reduces both perceived and physiologically measured cognitive load while enhancing usability. Participants reported increased feelings of comfort, safety, trust, and a stronger sense of collaboration when working with the adaptive robot. This highlights the potential of integrating real-time physiological data into human-robot interaction paradigms. This novel approach creates more intuitive and collaborative industrial environments where robots effectively 'read' and respond to human cognitive states, and we feature all data and code for future use.
Read more9/17/2024

0
Motion Prediction with Gaussian Processes for Safe Human-Robot Interaction in Virtual Environments
Stanley Mugisha, Vamsi Krishna Guda, Christine Chevallereau, Damien Chablat, Matteo Zoppi
Humans use collaborative robots as tools for accomplishing various tasks. The interaction between humans and robots happens in tight shared workspaces. However, these machines must be safe to operate alongside humans to minimize the risk of accidental collisions. Ensuring safety imposes many constraints, such as reduced torque and velocity limits during operation, thus increasing the time to accomplish many tasks. However, for applications such as using collaborative robots as haptic interfaces with intermittent contacts for virtual reality applications, speed limitations result in poor user experiences. This research aims to improve the efficiency of a collaborative robot while improving the safety of the human user. We used Gaussian process models to predict human hand motion and developed strategies for human intention detection based on hand motion and gaze to improve the time for the robot and human security in a virtual environment. We then studied the effect of prediction. Results from comparisons show that the prediction models improved the robot time by 3% and safety by 17%. When used alongside gaze, prediction with Gaussian process models resulted in an improvement of the robot time by 2% and the safety by 13%.
Read more5/21/2024

0
Collaborating for Success: Optimizing System Efficiency and Resilience Under Agile Industrial Settings
Sunny Katyara, Suchita Sharma, Praveen Damacharla, Carlos Garcia Santiago, Francis O'Farrell, Philip Long
Designing an efficient and resilient human-robot collaboration strategy that not only upholds the safety and ergonomics of shared workspace but also enhances the performance and agility of collaborative setup presents significant challenges concerning environment perception and robot control. In this research, we introduce a novel approach for collaborative environment monitoring and robot motion regulation to address this multifaceted problem. Our study proposes novel computation and division of safety monitoring zones, adhering to ISO 13855 and TS 15066 standards, utilizing 2D lasers information. These zones are not only configured in the standard three-layer arrangement but are also expanded into two adjacent quadrants, thereby enhancing system uptime and preventing unnecessary deadlocks. Moreover, we also leverage 3D visual information to track dynamic human articulations and extended intrusions. Drawing upon the fused sensory data from 2D and 3D perceptual spaces, our proposed hierarchical controller stably regulates robot velocity, validated using Lasalle in-variance principle. Empirical evaluations demonstrate that our approach significantly reduces task execution time and system response delay, resulting in improved efficiency and resilience within collaborative settings.
Read more9/14/2024