Collaborative Conversation in Safe Multimodal Human-Robot Collaboration

0

Sign in to get full access
Overview
- Describes a system for enabling safe and effective multimodal collaboration between humans and robots
- Focuses on the critical role of communication in human-robot collaboration
- Integrates large language models and multimodal perception to enable natural, contextual interaction
Plain English Explanation
The paper presents a framework for enabling safe and efficient collaboration between humans and robots in shared workspaces. A key focus is on enabling effective communication and mutual understanding between the human and robot partners.
The system leverages large language models to allow the robot to engage in natural, contextual dialogue with the human. This is combined with multimodal perception capabilities that allow the robot to perceive and understand the human's physical actions and environment.
By integrating these technologies, the robot can better comprehend the human's intent, adapt its behavior accordingly, and provide relevant feedback and instructions. This helps to ensure safe and coordinated collaboration, where the human and robot can fluidly work together towards shared goals.
The system also includes mechanisms to monitor the human's mental state and physical safety, and adjust the robot's actions to maintain a safe working environment. This critical role of effective communication is a key enabler for enhancing human-robot collaborative assembly in manufacturing systems.
Technical Explanation
The paper introduces a modular framework for enabling safe and effective multimodal collaboration between humans and robots. The core components include:
-
Multimodal Perception: The robot uses cameras, sensors, and large language models to perceive the human's physical actions, environment, and intent.
-
Collaborative Dialogue: A natural language processing module allows the robot to engage in contextual, back-and-forth dialogue with the human, enabling shared understanding.
-
Safety Monitoring: The system continuously monitors the human's mental state and physical safety, and adjusts the robot's actions accordingly to maintain a safe working environment.
-
Adaptive Behavior: Based on the perceived human intent and environmental context, the robot can dynamically adjust its actions and provide relevant feedback to the human.
The researchers evaluated the system in a series of human-robot collaboration experiments, demonstrating its ability to enable safe and efficient joint task completion. Key insights from the study include the importance of natural communication, adaptive behavior, and safety monitoring in facilitating effective human-robot teamwork.
Critical Analysis
The paper presents a comprehensive approach to enabling safe and effective multimodal collaboration between humans and robots. The integration of large language models, multimodal perception, and adaptive behavior is a promising direction for advancing the state-of-the-art in human-robot interaction.
One potential limitation mentioned in the paper is the need for further research on scalability and generalization, as the current system is focused on a specific task domain. Expanding the capabilities to handle a wider range of tasks and environments would be an important next step.
Additionally, the paper does not address potential ethical concerns around the use of advanced AI systems in close proximity to humans. Issues such as transparency, accountability, and human oversight will need to be carefully considered as these technologies become more prevalent.
Overall, the research presented in this paper represents a significant contribution to the field of collaborative human-robot interaction, and the insights and techniques developed could have far-reaching implications for the future of human-robot teamwork.
Conclusion
The paper introduces a comprehensive framework for enabling safe and effective multimodal collaboration between humans and robots. By integrating large language models, multimodal perception, and adaptive behavior, the system allows for natural, contextual communication and coordinated task completion.
The key innovations include the ability to monitor human safety, dynamically adjust robot actions, and maintain a shared understanding through collaborative dialogue. These capabilities are critical for facilitating efficient and trustworthy human-robot teamwork in shared workspaces.
While further research is needed to address scalability and ethical considerations, the insights and techniques presented in this paper represent an important step forward in the field of collaborative human-robot interaction. As robots become increasingly integrated into our daily lives, such advancements will be crucial for ensuring safe and productive human-robot collaboration.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Collaborative Conversation in Safe Multimodal Human-Robot Collaboration
Davide Ferrari, Andrea Pupa, Cristian Secchi
In the context of Human-Robot Collaboration (HRC), it is crucial that the two actors are able to communicate with each other in a natural and efficient manner. The absence of a communication interface is often a cause of undesired slowdowns. On one hand, this is because unforeseen events may occur, leading to errors. On the other hand, due to the close contact between humans and robots, the speed must be reduced significantly to comply with safety standard ISO/TS 15066. In this paper, we propose a novel architecture that enables operators and robots to communicate efficiently, emulating human-to-human dialogue, while addressing safety concerns. This approach aims to establish a communication framework that not only facilitates collaboration but also reduces undesired speed reduction. Through the use of a predictive simulator, we can anticipate safety-related limitations, ensuring smoother workflows, minimizing risks, and optimizing efficiency. The overall architecture has been validated with a UR10e and compared with a state of the art technique. The results show a significant improvement in user experience, with a corresponding 23% reduction in execution times and a 50% decrease in robot downtime.
Read more9/12/2024

0
The Critical Role of Effective Communication in Human-Robot Collaborative Assembly
Davide Ferrari, Cristian Secchi
In the rapidly evolving landscape of Human-Robot Collaboration (HRC), effective communication between humans and robots is crucial for complex task execution. Traditional request-response systems often lack naturalness and may hinder efficiency. This study emphasizes the importance of adopting human-like communication interactions to enable fluent vocal communication between human operators and robots simulating a collaborative human-robot industrial assembly. We propose a novel approach that employs human-like interactions through natural dialogue, enabling human operators to engage in vocal conversations with robots. Through a comparative experiment, we demonstrate the efficacy of our approach in enhancing task performance and collaboration efficiency. The robot's ability to engage in meaningful vocal conversations enables it to seek clarification, provide status updates, and ask for assistance when required, leading to improved coordination and a smoother workflow. The results indicate that the adoption of human-like conversational interactions positively influences the human-robot collaborative dynamic. Human operators find it easier to convey complex instructions and preferences, resulting in a more productive and satisfying collaboration experience.
Read more9/12/2024
💬
0
Integrating Large Language Models with Multimodal Virtual Reality Interfaces to Support Collaborative Human-Robot Construction Work
Somin Park, Carol C. Menassa, Vineet R. Kamat
In the construction industry, where work environments are complex, unstructured and often dangerous, the implementation of Human-Robot Collaboration (HRC) is emerging as a promising advancement. This underlines the critical need for intuitive communication interfaces that enable construction workers to collaborate seamlessly with robotic assistants. This study introduces a conversational Virtual Reality (VR) interface integrating multimodal interaction to enhance intuitive communication between construction workers and robots. By integrating voice and controller inputs with the Robot Operating System (ROS), Building Information Modeling (BIM), and a game engine featuring a chat interface powered by a Large Language Model (LLM), the proposed system enables intuitive and precise interaction within a VR setting. Evaluated by twelve construction workers through a drywall installation case study, the proposed system demonstrated its low workload and high usability with succinct command inputs. The proposed multimodal interaction system suggests that such technological integration can substantially advance the integration of robotic assistants in the construction industry.
Read more4/5/2024
0
A Modular Framework for Flexible Planning in Human-Robot Collaboration
Valerio Belcamino, Mariya Kilina, Linda Lastrico, Alessandro Carf`i, Fulvio Mastrogiovanni
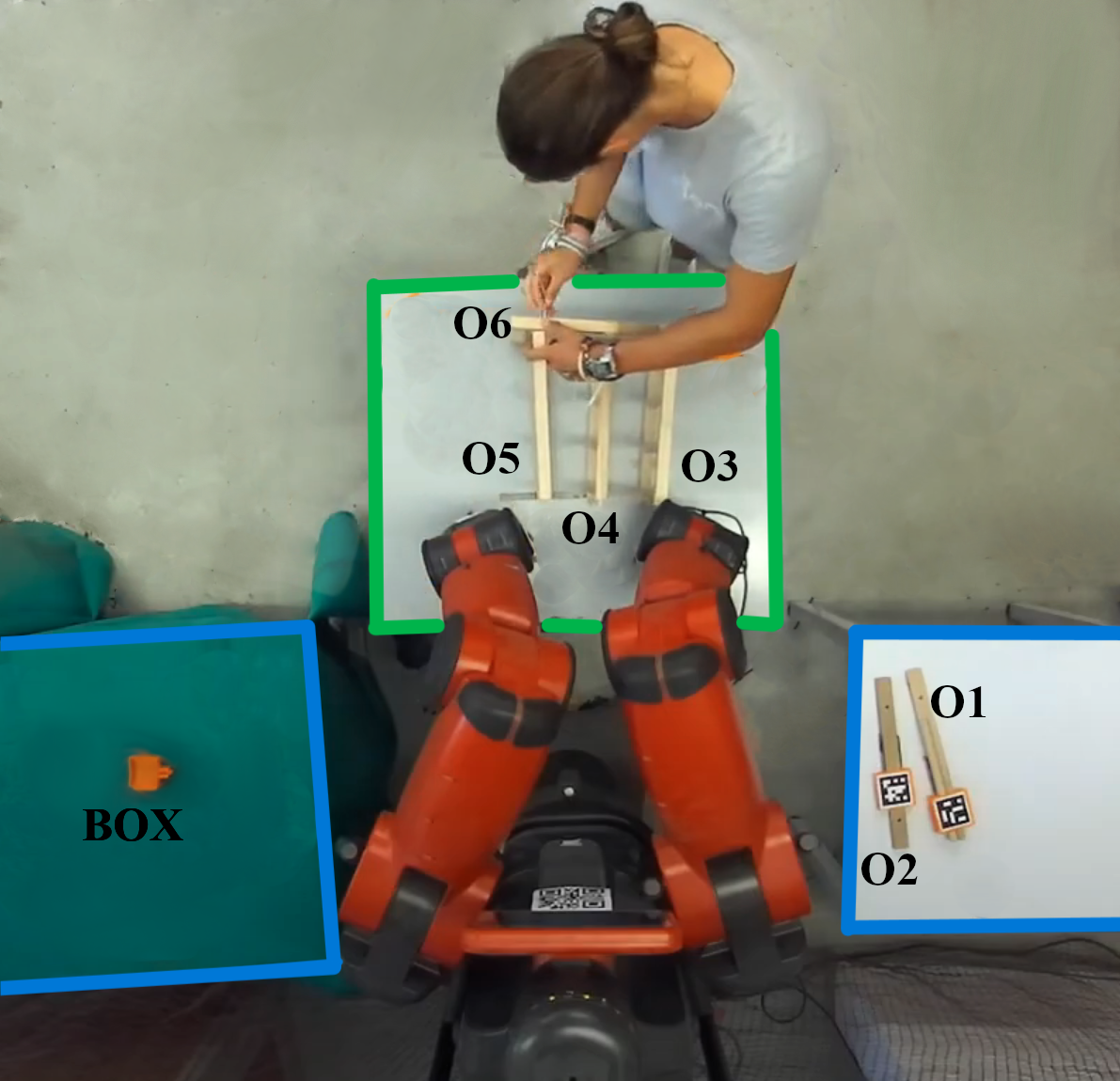
This paper presents a comprehensive framework to enhance Human-Robot Collaboration (HRC) in real-world scenarios. It introduces a formalism to model articulated tasks, requiring cooperation between two agents, through a smaller set of primitives. Our implementation leverages Hierarchical Task Networks (HTN) planning and a modular multisensory perception pipeline, which includes vision, human activity recognition, and tactile sensing. To showcase the system's scalability, we present an experimental scenario where two humans alternate in collaborating with a Baxter robot to assemble four pieces of furniture with variable components. This integration highlights promising advancements in HRC, suggesting a scalable approach for complex, cooperative tasks across diverse applications.
Read more6/10/2024