Collaborating for Success: Optimizing System Efficiency and Resilience Under Agile Industrial Settings

0

Sign in to get full access
Overview
- The paper explores strategies for optimizing system efficiency and resilience in agile industrial settings through collaboration.
- It examines how organizations can leverage collaborative approaches to enhance operational performance and adaptability.
- The research investigates the design and implementation of collaborative systems that can adapt to dynamic industrial environments.
Plain English Explanation
In today's fast-paced industrial world, companies need to be nimble and adaptable to stay competitive. This paper looks at how collaborating for success can help businesses optimize their systems and become more resilient.
The key idea is that by working together, different parts of an organization can function more efficiently and be better prepared to handle unexpected challenges. For example, collaborative robots could allow humans and machines to complement each other's strengths on the factory floor. And collaborative conversations between teams could lead to more flexible and adaptable production processes.
Overall, the research explores how companies can adopt a "collaborative mindset" to improve their operations and stay agile in today's fast-moving industrial landscape.
Technical Explanation
The paper presents a framework for optimizing the design and control methods of collaborative systems in agile industrial settings. It examines how organizations can leverage modular frameworks for flexible planning and automated real-time inspection to enhance system efficiency and resilience.
The researchers propose a collaborative systems architecture that enables dynamic adaptation to changing operational requirements. Key elements include:
- Modular, reconfigurable hardware and software: Allows rapid deployment and optimization of collaborative processes
- Distributed, decentralized control: Enables autonomous adaptation and decision-making at the local level
- Real-time monitoring and optimization: Supports continuous system-level adjustments based on performance data
Through simulation experiments and case studies, the paper demonstrates how this collaborative approach can improve outcomes like reduced downtime, increased throughput, and greater flexibility in the face of disruptions.
Critical Analysis
The paper provides a compelling vision for how collaborative systems can strengthen industrial operations. However, the research also acknowledges several practical challenges and limitations that would need to be addressed.
For instance, the authors note the difficulty of establishing appropriate trust and communication protocols between human workers and intelligent machines. There are also concerns around cybersecurity vulnerabilities in distributed control architectures.
Additionally, the economic and organizational barriers to adopting such a collaborative model, especially for smaller manufacturers, are not fully explored. The paper would benefit from a more nuanced discussion of the tradeoffs and hurdles involved in transitioning to this type of system.
Overall, the research offers an innovative perspective, but further work is needed to translate the theoretical benefits into realistic, scalable solutions for industry.
Conclusion
This paper makes a compelling case for embracing a collaborative approach to optimize system efficiency and resilience in dynamic industrial settings. By leveraging modular, adaptive technologies and fostering cross-functional coordination, organizations can enhance their operational capabilities and adaptability.
While the research highlights promising technical advances, it also acknowledges the practical challenges that must be addressed. Navigating human-machine trust, cybersecurity risks, and organizational change will be critical to successfully implementing this collaborative vision.
Nonetheless, the core principles articulated in this work - of harnessing the complementary strengths of people and technology, and continuously adapting to evolving needs - offer a valuable framework for modern industrial leaders to consider. As companies strive to remain agile and competitive, the lessons from this research could prove invaluable.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Collaborating for Success: Optimizing System Efficiency and Resilience Under Agile Industrial Settings
Sunny Katyara, Suchita Sharma, Praveen Damacharla, Carlos Garcia Santiago, Francis O'Farrell, Philip Long
Designing an efficient and resilient human-robot collaboration strategy that not only upholds the safety and ergonomics of shared workspace but also enhances the performance and agility of collaborative setup presents significant challenges concerning environment perception and robot control. In this research, we introduce a novel approach for collaborative environment monitoring and robot motion regulation to address this multifaceted problem. Our study proposes novel computation and division of safety monitoring zones, adhering to ISO 13855 and TS 15066 standards, utilizing 2D lasers information. These zones are not only configured in the standard three-layer arrangement but are also expanded into two adjacent quadrants, thereby enhancing system uptime and preventing unnecessary deadlocks. Moreover, we also leverage 3D visual information to track dynamic human articulations and extended intrusions. Drawing upon the fused sensory data from 2D and 3D perceptual spaces, our proposed hierarchical controller stably regulates robot velocity, validated using Lasalle in-variance principle. Empirical evaluations demonstrate that our approach significantly reduces task execution time and system response delay, resulting in improved efficiency and resilience within collaborative settings.
Read more9/14/2024
0
Real-Time Adaptive Industrial Robots: Improving Safety And Comfort In Human-Robot Collaboration
Damian Hostettler, Simon Mayer, Jan Liam Albert, Kay Erik Jenss, Christian Hildebrand
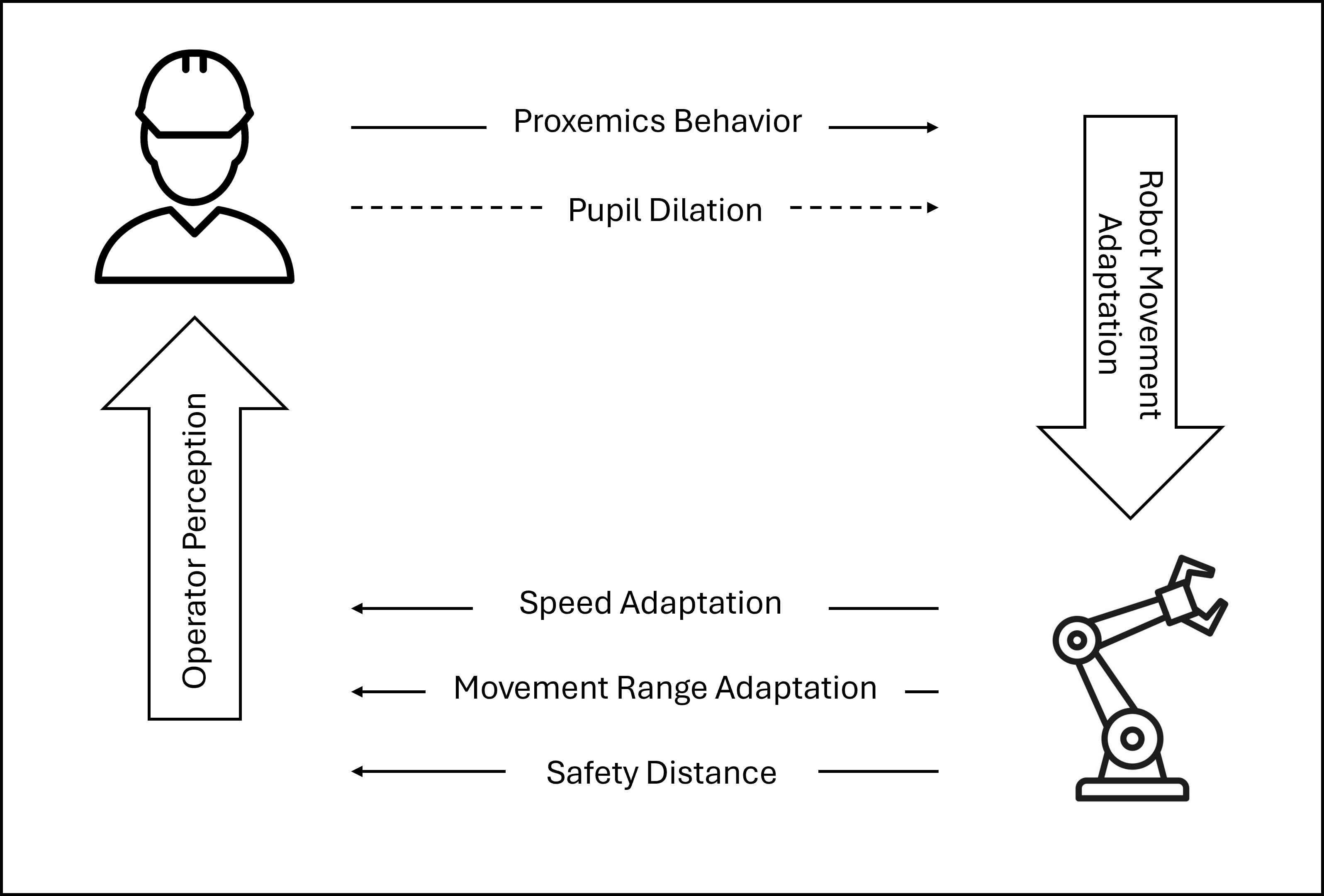
Industrial robots become increasingly prevalent, resulting in a growing need for intuitive, comforting human-robot collaboration. We present a user-aware robotic system that adapts to operator behavior in real time while non-intrusively monitoring physiological signals to create a more responsive and empathetic environment. Our prototype dynamically adjusts robot speed and movement patterns while measuring operator pupil dilation and proximity. Our user study compares this adaptive system to a non-adaptive counterpart, and demonstrates that the adaptive system significantly reduces both perceived and physiologically measured cognitive load while enhancing usability. Participants reported increased feelings of comfort, safety, trust, and a stronger sense of collaboration when working with the adaptive robot. This highlights the potential of integrating real-time physiological data into human-robot interaction paradigms. This novel approach creates more intuitive and collaborative industrial environments where robots effectively 'read' and respond to human cognitive states, and we feature all data and code for future use.
Read more9/17/2024

0
Optimizing Design and Control Methods for Using Collaborative Robots in Upper-Limb Rehabilitation
Dario Onfiani, Marco Caramaschi, Luigi Biagiotti, Fabio Pini
In this paper, we address the development of a robotic rehabilitation system for the upper limbs based on collaborative end-effector solutions. The use of commercial collaborative robots offers significant advantages for this task, as they are optimized from an engineering perspective and ensure safe physical interaction with humans. However, they also come with noticeable drawbacks, such as the limited range of sizes available on the market and the standard control modes, which are primarily oriented towards industrial or service applications. To address these limitations, we propose an optimization-based design method to fully exploit the capability of the cobot in performing rehabilitation tasks. Additionally, we introduce a novel control architecture based on an admittance-type Virtual Fixture method, which constrains the motion of the robot along a prescribed path. This approach allows for an intuitive definition of the task to be performed via Programming by Demonstration and enables the system to operate both passively and actively. In passive mode, the system supports the patient during task execution with additional force, while in active mode, it opposes the motion with a braking force. Experimental results demonstrate the effectiveness of the proposed method.
Read more7/29/2024

0
Collaborative Conversation in Safe Multimodal Human-Robot Collaboration
Davide Ferrari, Andrea Pupa, Cristian Secchi
In the context of Human-Robot Collaboration (HRC), it is crucial that the two actors are able to communicate with each other in a natural and efficient manner. The absence of a communication interface is often a cause of undesired slowdowns. On one hand, this is because unforeseen events may occur, leading to errors. On the other hand, due to the close contact between humans and robots, the speed must be reduced significantly to comply with safety standard ISO/TS 15066. In this paper, we propose a novel architecture that enables operators and robots to communicate efficiently, emulating human-to-human dialogue, while addressing safety concerns. This approach aims to establish a communication framework that not only facilitates collaboration but also reduces undesired speed reduction. Through the use of a predictive simulator, we can anticipate safety-related limitations, ensuring smoother workflows, minimizing risks, and optimizing efficiency. The overall architecture has been validated with a UR10e and compared with a state of the art technique. The results show a significant improvement in user experience, with a corresponding 23% reduction in execution times and a 50% decrease in robot downtime.
Read more9/12/2024