Real-Time Convolutional Neural Network-Based Star Detection and Centroiding Method for CubeSat Star Tracker

0
Sign in to get full access
Overview
- This paper presents a real-time convolutional neural network-based method for detecting and centering stars in images captured by a CubeSat star tracker.
- The proposed approach aims to improve the accuracy and speed of star detection and centroiding, which are critical for spacecraft attitude determination.
- The authors evaluate their method on both simulated and real-world data, demonstrating its effectiveness compared to traditional techniques.
Plain English Explanation
Spacecraft like CubeSats often use "star trackers" - cameras that take pictures of the stars to figure out which way the spacecraft is pointing. This paper describes a new way to quickly and accurately find the stars in those pictures using a type of artificial intelligence called a convolutional neural network.
The researchers developed a neural network model that can rapidly identify the locations of stars in the images captured by a CubeSat's star tracker. This is an important task, as knowing the precise positions of the stars allows the spacecraft to determine its orientation, or "attitude," in space.
The team tested their neural network approach on both simulated star tracker data and real-world images. They found that it outperformed traditional star detection and centroiding methods in terms of speed and accuracy. This could help CubeSats and other small satellites more quickly and reliably determine their orientation, which is crucial for navigating and completing their missions.
Technical Explanation
The paper presents a real-time convolutional neural network-based star detection and centroiding method for CubeSat star trackers. The authors develop a neural network architecture that can rapidly locate and center the positions of stars in images captured by a CubeSat's star tracker.
The proposed method uses a convolutional neural network to first detect the presence of stars in the input image. It then applies a centroiding algorithm to precisely determine the center coordinates of each detected star.
The authors evaluate their approach using both simulated star tracker data and real-world images. They demonstrate that the neural network-based method outperforms traditional star detection and centroiding techniques in terms of speed and accuracy.
Critical Analysis
The paper provides a thorough evaluation of the proposed neural network-based star detection and centroiding method, including comparisons to established techniques on both simulated and real-world data. However, the authors acknowledge several limitations and areas for future research.
For example, the neural network was trained and tested on a relatively limited dataset, which may restrict its generalization to a wider range of star tracker conditions and environments. Additionally, the paper does not address the computational resources required to deploy the neural network model on a CubeSat's onboard processor, which could be a practical concern for real-world implementation.
Further research could explore techniques to optimize the neural network for edge devices or investigate methods to dynamically adapt the model to changing star tracker conditions during a CubeSat's mission.
Conclusion
This paper presents a promising approach to improving the speed and accuracy of star detection and centroiding for CubeSat star trackers using a convolutional neural network. The demonstrated performance advantages over traditional techniques could lead to more reliable attitude determination for small satellites, enabling them to better navigate and complete their missions. While the research has some limitations, it represents an important step forward in applying machine learning to enhance the capabilities of resource-constrained spacecraft.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Real-Time Convolutional Neural Network-Based Star Detection and Centroiding Method for CubeSat Star Tracker
Hongrui Zhao, Michael F. Lembeck, Adrian Zhuang, Riya Shah, Jesse Wei
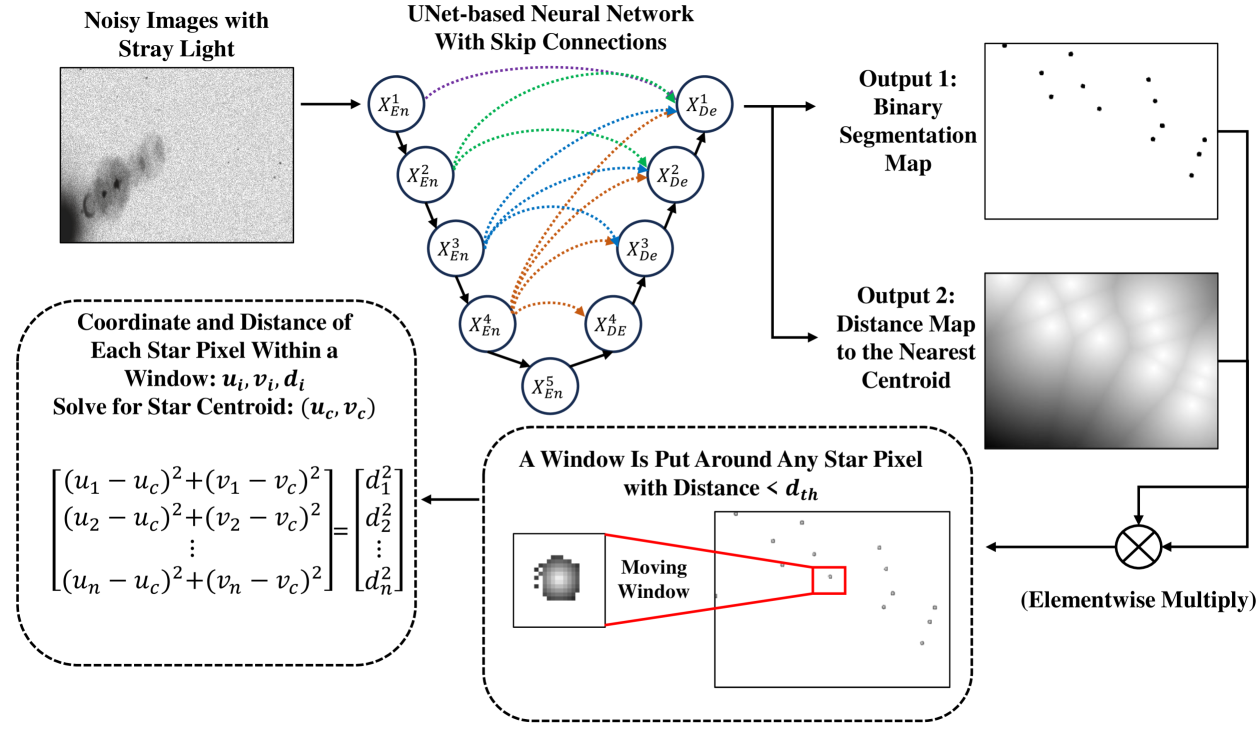
Star trackers are one of the most accurate celestial sensors used for absolute attitude determination. The devices detect stars in captured images and accurately compute their projected centroids on an imaging focal plane with subpixel precision. Traditional algorithms for star detection and centroiding often rely on threshold adjustments for star pixel detection and pixel brightness weighting for centroid computation. However, challenges like high sensor noise and stray light can compromise algorithm performance. This article introduces a Convolutional Neural Network (CNN)-based approach for star detection and centroiding, tailored to address the issues posed by noisy star tracker images in the presence of stray light and other artifacts. Trained using simulated star images overlayed with real sensor noise and stray light, the CNN produces both a binary segmentation map distinguishing star pixels from the background and a distance map indicating each pixel's proximity to the nearest star centroid. Leveraging this distance information alongside pixel coordinates transforms centroid calculations into a set of trilateration problems solvable via the least squares method. Our method employs efficient UNet variants for the underlying CNN architectures, and the variants' performances are evaluated. Comprehensive testing has been undertaken with synthetic image evaluations, hardware-in-the-loop assessments, and night sky tests. The tests consistently demonstrated that our method outperforms several existing algorithms in centroiding accuracy and exhibits superior resilience to high sensor noise and stray light interference. An additional benefit of our algorithms is that they can be executed in real-time on low-power edge AI processors.
Read more5/1/2024

0
Markers Identification for Relative Pose Estimation of an Uncooperative Target
Batu Candan, Simone Servadio
This paper introduces a novel method using chaser spacecraft image processing and Convolutional Neural Networks (CNNs) to detect structural markers on the European Space Agency's (ESA) Environmental Satellite (ENVISAT) for safe de-orbiting. Advanced image pre-processing techniques, including noise addition and blurring, are employed to improve marker detection accuracy and robustness. Initial results show promising potential for autonomous space debris removal, supporting proactive strategies for space sustainability. The effectiveness of our approach suggests that our estimation method could significantly enhance the safety and efficiency of debris removal operations by implementing more robust and autonomous systems in actual space missions.
Read more7/31/2024

0
Data downlink prioritization using image classification on-board a 6U CubeSat
Keenan A. A. Chatar, Ezra Fielding, Kei Sano, Kentaro Kitamura
Nanosatellites are proliferating as low-cost dedicated sensing systems with lean development cycles. Kyushu Institute of Technology and collaborators have launched a joint venture for a nanosatellite mission, VERTECS. The primary mission is to elucidate the formation history of stars by observing the optical-wavelength cosmic background radiation. The VERTECS satellite will be equipped with a small-aperture telescope and a high-precision attitude control system to capture the cosmic data for analysis on the ground. However, nanosatellites are limited by their onboard memory resources and downlink speed capabilities. Additionally, due to a limited number of ground stations, the satellite mission will face issues meeting the required data budget for mission success. To alleviate this issue, we propose an on-orbit system to autonomously classify and then compress desirable image data for data downlink prioritization and optimization. The system comprises a prototype Camera Controller Board (CCB) which carries a Raspberry Pi Compute Module 4 which is used for classification and compression. The system uses a lightweight Convolutional Neural Network (CNN) model to classify and determine the desirability of captured image data. The model is designed to be lean and robust to reduce the computational and memory load on the satellite. The model is trained and tested on a novel star field dataset consisting of data captured by the Sloan Digital Sky Survey (SDSS). The dataset is meant to simulate the expected data produced by the 6U satellite. The compression step implements GZip, RICE or HCOMPRESS compression, which are standards for astronomical data. Preliminary testing on the proposed CNN model results in a classification accuracy of about 100% on the star field dataset, with compression ratios of 3.99, 5.16 and 5.43 for GZip, RICE and HCOMPRESS that were achieved on tested FITS image data.
Read more8/28/2024

0
Vision-Based Detection of Uncooperative Targets and Components on Small Satellites
Hannah Grauer, Elena-Sorina Lupu, Connor Lee, Soon-Jo Chung, Darren Rowen, Benjamen Bycroft, Phaedrus Leeds, John Brader
Space debris and inactive satellites pose a threat to the safety and integrity of operational spacecraft and motivate the need for space situational awareness techniques. These uncooperative targets create a challenging tracking and detection problem due to a lack of prior knowledge of their features, trajectories, or even existence. Recent advancements in computer vision models can be used to improve upon existing methods for tracking such uncooperative targets to make them more robust and reliable to the wide-ranging nature of the target. This paper introduces an autonomous detection model designed to identify and monitor these objects using learning and computer vision. The autonomous detection method aims to identify and accurately track the uncooperative targets in varied circumstances, including different camera spectral sensitivities, lighting, and backgrounds. Our method adapts to the relative distance between the observing spacecraft and the target, and different detection strategies are adjusted based on distance. At larger distances, we utilize You Only Look Once (YOLOv8), a multitask Convolutional Neural Network (CNN), for zero-shot and domain-specific single-shot real time detection of the target. At shorter distances, we use knowledge distillation to combine visual foundation models with a lightweight fast segmentation CNN (Fast-SCNN) to segment the spacecraft components with low storage requirements and fast inference times, and to enable weight updates from earth and possible onboard training. Lastly, we test our method on a custom dataset simulating the unique conditions encountered in space, as well as a publicly-available dataset.
Read more8/23/2024