Recovering the state and dynamics of autonomous system with partial states solution using neural networks

0

Sign in to get full access
Overview
- Recovering the state and dynamics of an autonomous system with partial state observations using neural networks
- Presents a "deep hidden physics model" to infer the full system state and dynamics from limited observations
- Demonstrates the model's effectiveness on simulated systems and real-world examples
Plain English Explanation
The paper discusses a method for recovering the full state and underlying dynamics of an autonomous system when only partial observations of the system are available. This is a common challenge in many real-world applications, where we may only have access to a subset of the variables that fully describe a complex system.
The key idea is to use a neural network-based model to learn the hidden or unobserved parts of the system state and the governing equations that drive the system's dynamics. This "deep hidden physics model" takes the limited observations as input and outputs estimates of the full system state and the underlying mathematical relationships between the variables.
By identifying the latent state transitions and learning a hybrid representation of the system, the model is able to capture the complex, nonlinear dynamics of the autonomous system. This allows the researchers to accurately predict the future behavior of the system, even with limited information about its current state.
Technical Explanation
The core of the proposed "deep hidden physics model" is a neural network architecture that consists of two main components:
-
State Encoder: This part of the model takes the available partial state observations as input and learns to estimate the full system state, including the unobserved variables.
-
Dynamics Predictor: This component uses the estimated full state to learn the governing equations that describe the evolution of the system over time. It can then predict the future state of the system based on the current state.
The researchers train this model end-to-end using a dataset of partial state observations and the corresponding full system state (which is assumed to be available for training, even though it would not be known in the real-world application). The model is optimized to minimize the error between the predicted full state and dynamics and the ground truth.
The paper demonstrates the effectiveness of this approach on several simulated and real-world examples, including a pendulum system and a complex ecological model. The results show that the deep hidden physics model can accurately recover the full system state and dynamics, even when only a subset of the variables are observed.
Critical Analysis
The proposed method has several strengths, including its ability to handle nonlinear and complex systems, its data-driven nature (which avoids the need for detailed physical models), and its potential for real-world applications. However, the paper also acknowledges some limitations and areas for further research:
- The approach relies on having a dataset of partial observations paired with full state information, which may not always be available in practice.
- The model's performance may degrade as the dimensionality of the system increases or as the number of unobserved variables grows.
- The paper does not explore the sensitivity of the model to noise or uncertainties in the partial observations.
- Further research is needed to understand the generalization capabilities of the model and its ability to handle changes in the underlying system dynamics over time.
Additionally, while the paper presents promising results, it would be valuable to see more extensive validation on a wider range of real-world systems to fully assess the method's practical utility and limitations.
Conclusion
This paper introduces a novel neural network-based approach for recovering the full state and dynamics of an autonomous system from limited, partial observations. The proposed "deep hidden physics model" demonstrates strong performance on both simulated and real-world examples, suggesting its potential for applications where direct access to the complete system state is not feasible.
The work highlights the power of data-driven techniques, such as neural networks, to capture the complex, nonlinear behaviors of dynamic systems. By identifying the latent state transitions and learning a hybrid representation, the model can make accurate predictions even with limited information, opening up new possibilities for modeling and understanding complex real-world phenomena.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Recovering the state and dynamics of autonomous system with partial states solution using neural networks
Vijay Kag
In this paper we explore the performance of deep hidden physics model (M. Raissi 2018) for autonomous systems. These systems are described by set of ordinary differential equations which do not explicitly depend on time. Such systems can be found in nature and have applications in modeling chemical concentrations, population dynamics, n-body problems in physics etc. In this work we consider dynamics of states, which explain how the states will evolve are unknown to us. We approximate state and dynamics both using neural networks. We have considered examples of 2D linear/nonlinear and Lorenz systems. We observe that even without knowing all the states information, we can estimate dynamics of certain states whose state information are known.
Read more8/9/2024
🛸
0
Learning Governing Equations of Unobserved States in Dynamical Systems
Gevik Grigorian, Sandip V. George, Simon Arridge
Data-driven modelling and scientific machine learning have been responsible for significant advances in determining suitable models to describe data. Within dynamical systems, neural ordinary differential equations (ODEs), where the system equations are set to be governed by a neural network, have become a popular tool for this challenge in recent years. However, less emphasis has been placed on systems that are only partially-observed. In this work, we employ a hybrid neural ODE structure, where the system equations are governed by a combination of a neural network and domain-specific knowledge, together with symbolic regression (SR), to learn governing equations of partially-observed dynamical systems. We test this approach on two case studies: A 3-dimensional model of the Lotka-Volterra system and a 5-dimensional model of the Lorenz system. We demonstrate that the method is capable of successfully learning the true underlying governing equations of unobserved states within these systems, with robustness to measurement noise.
Read more5/8/2024
🧠
0
Stretched and measured neural predictions of complex network dynamics
Vaiva Vasiliauskaite, Nino Antulov-Fantulin
Differential equations are a ubiquitous tool to study dynamics, ranging from physical systems to complex systems, where a large number of agents interact through a graph with non-trivial topological features. Data-driven approximations of differential equations present a promising alternative to traditional methods for uncovering a model of dynamical systems, especially in complex systems that lack explicit first principles. A recently employed machine learning tool for studying dynamics is neural networks, which can be used for data-driven solution finding or discovery of differential equations. Specifically for the latter task, however, deploying deep learning models in unfamiliar settings - such as predicting dynamics in unobserved state space regions or on novel graphs - can lead to spurious results. Focusing on complex systems whose dynamics are described with a system of first-order differential equations coupled through a graph, we show that extending the model's generalizability beyond traditional statistical learning theory limits is feasible. However, achieving this advanced level of generalization requires neural network models to conform to fundamental assumptions about the dynamical model. Additionally, we propose a statistical significance test to assess prediction quality during inference, enabling the identification of a neural network's confidence level in its predictions.
Read more4/26/2024
0
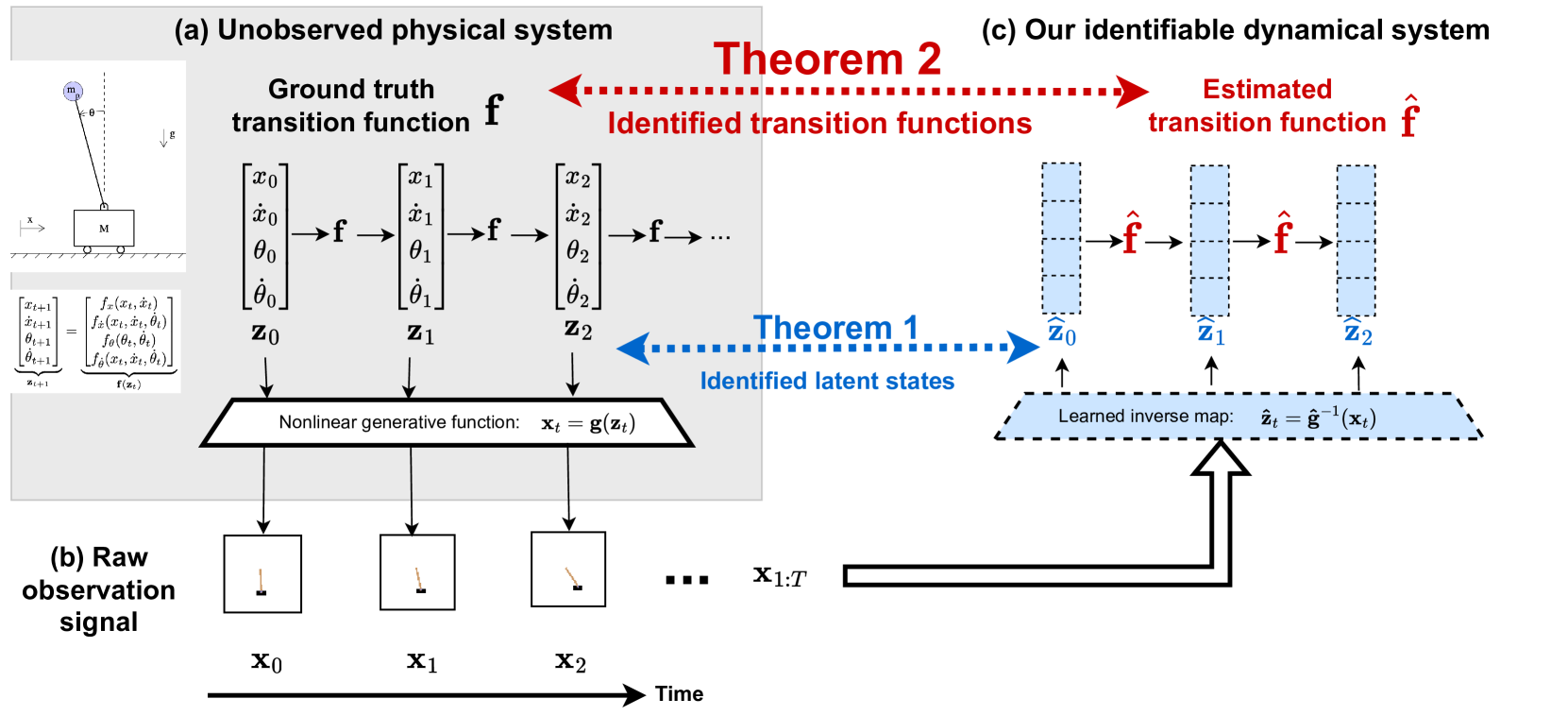
Identifying latent state transition in non-linear dynamical systems
c{C}au{g}lar H{i}zl{i}, c{C}au{g}atay Y{i}ld{i}z, Matthias Bethge, ST John, Pekka Marttinen
This work aims to improve generalization and interpretability of dynamical systems by recovering the underlying lower-dimensional latent states and their time evolutions. Previous work on disentangled representation learning within the realm of dynamical systems focused on the latent states, possibly with linear transition approximations. As such, they cannot identify nonlinear transition dynamics, and hence fail to reliably predict complex future behavior. Inspired by the advances in nonlinear ICA, we propose a state-space modeling framework in which we can identify not just the latent states but also the unknown transition function that maps the past states to the present. We introduce a practical algorithm based on variational auto-encoders and empirically demonstrate in realistic synthetic settings that we can (i) recover latent state dynamics with high accuracy, (ii) correspondingly achieve high future prediction accuracy, and (iii) adapt fast to new environments.
Read more6/7/2024