ReFeree: Radar-based efficient global descriptor using a Feature and Free space for Place Recognition
2403.14176
0
0

Abstract
Radar is highlighted for robust sensing capabilities in adverse weather conditions (e.g. dense fog, heavy rain, or snowfall). In addition, Radar can cover wide areas and penetrate small particles. Despite these advantages, Radar-based place recognition remains in the early stages compared to other sensors due to its unique characteristics such as low resolution, and significant noise. In this paper, we propose a Radarbased place recognition utilizing a descriptor called ReFeree using a feature and free space. Unlike traditional methods, we overwhelmingly summarize the Radar image. Despite being lightweight, it contains semi-metric information and is also outstanding from the perspective of place recognition performance. For concrete validation, we test a single session from the MulRan dataset and a multi-session from the Oxford Offroad Radar, Oxford Radar RobotCar, and the Boreas dataset.
Create account to get full access
Overview
- This paper proposes a radar-based global descriptor called ReFeree for efficient place recognition.
- The descriptor uses both feature information and free space information from radar data to create a compact representation for recognizing places.
- The authors evaluate ReFeree on several public radar datasets and show it outperforms state-of-the-art methods in place recognition tasks.
Plain English Explanation
The paper introduces a new way to represent radar data for the task of place recognition - the ability to identify locations that a robot or vehicle has visited before. The key idea is to use both the features (objects, surfaces, etc.) detected by the radar, as well as the free space information (areas where there are no detections).
This combined feature and free space representation is compact, and the authors show it performs better than other state-of-the-art radar-based place recognition methods. This is important because good place recognition is crucial for many autonomous navigation and mapping applications, and radar is a useful sensor for these tasks in challenging environments where other sensors like cameras may struggle.
The Enhanced Radar Perception via Multi-Task Learning and Advancements in Radar Odometry papers also explore using radar data for related tasks like perception and odometry. The RadarDistill: Boosting Radar-based Object Detection Performance and Diffusion-based Point Cloud Super-Resolution for mmWave Radar papers look at improving radar data quality and processing.
Technical Explanation
The key technical contribution of this paper is the ReFeree (Radar-based Efficient global descriptor using a Feature and Free space) descriptor. ReFeree takes radar data and computes a compact 256-dimensional vector representation that can be used for place recognition.
The descriptor has two main components:
-
Feature Information: This captures the detected objects, surfaces, and other features in the radar data. The authors use a learned encoder to extract a feature vector from the radar point cloud.
-
Free Space Information: This captures the empty space or unoccupied regions detected by the radar. The authors propose a novel free space encoding that captures the spatial distribution of free space.
The feature and free space encodings are concatenated to form the final 256-dimensional ReFeree descriptor. The authors evaluate ReFeree on several public radar datasets for place recognition tasks, and show it outperforms other state-of-the-art radar-based descriptors.
Critical Analysis
The paper provides a strong technical contribution in the form of the ReFeree descriptor, which effectively combines feature and free space information from radar data. The authors thoroughly evaluate ReFeree and demonstrate its advantages over prior work.
However, the paper does not discuss potential limitations or future research directions in depth. For example, it would be useful to understand how ReFeree might perform in more challenging real-world environments, or how it could be extended to other radar-based tasks like object detection or semantic mapping.
Additionally, the Radar Ghost Dataset for Evaluation of Ghost Objects in Automotive Radar paper highlights the challenge of dealing with "ghost" detections in radar data, which is not addressed in this work. Incorporating strategies to handle such artifacts could further improve the robustness of ReFeree.
Overall, the paper makes a valuable contribution to radar-based place recognition, but there are opportunities to explore the approach's limitations and expand its capabilities in future research.
Conclusion
This paper introduces ReFeree, a radar-based global descriptor that combines feature and free space information to enable efficient place recognition. The authors demonstrate that this compact representation outperforms state-of-the-art methods on several public datasets.
The work highlights the potential of radar as a useful sensor for autonomous navigation and mapping applications, particularly in challenging environments. By leveraging both detected features and free space, ReFeree provides a robust and efficient way to recognize previously visited locations, which is a crucial capability for many real-world robotics and transportation use cases.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Enabling Visual Recognition at Radio Frequency
Haowen Lai, Gaoxiang Luo, Yifei Liu, Mingmin Zhao
0
0
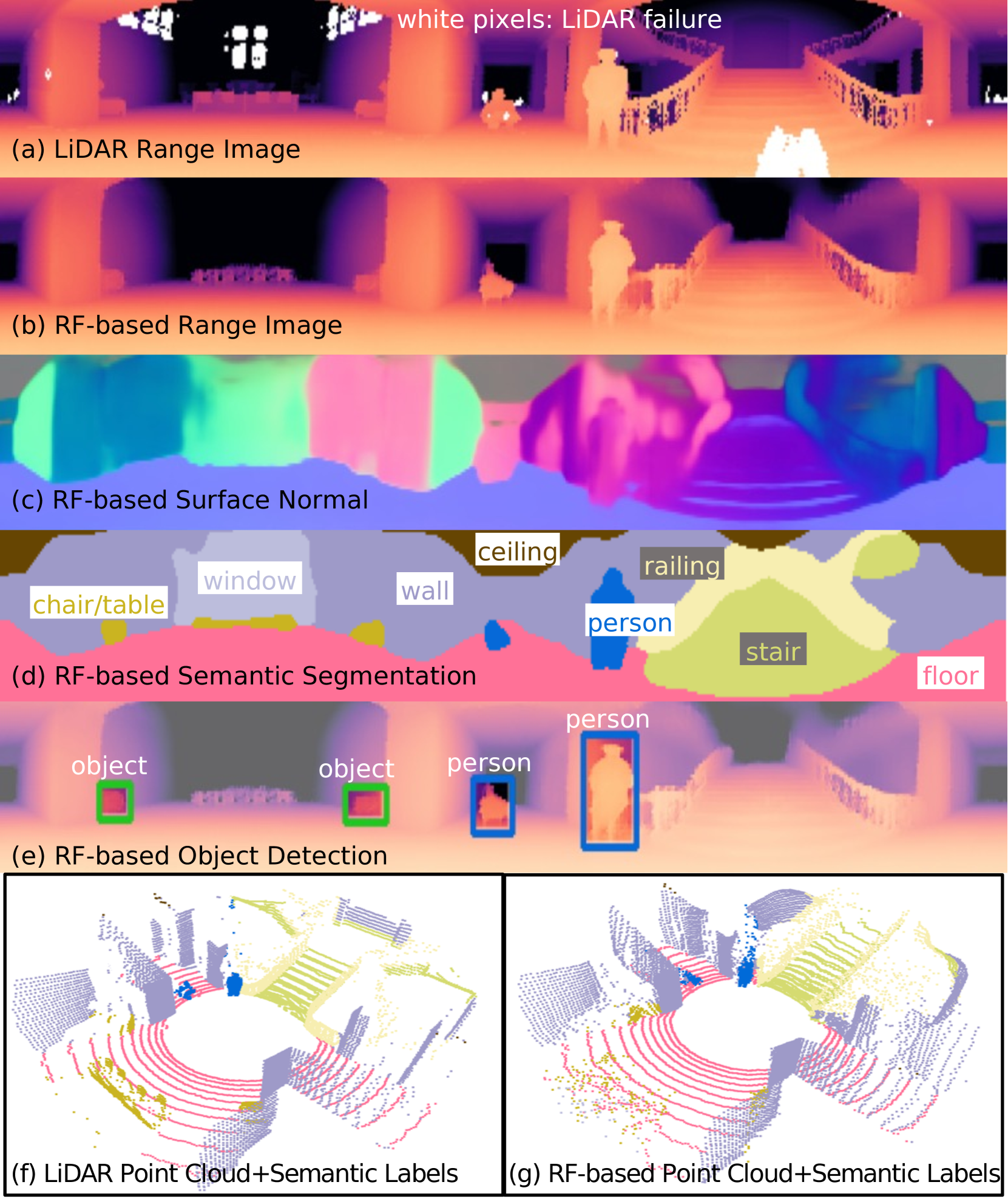
This paper introduces PanoRadar, a novel RF imaging system that brings RF resolution close to that of LiDAR, while providing resilience against conditions challenging for optical signals. Our LiDAR-comparable 3D imaging results enable, for the first time, a variety of visual recognition tasks at radio frequency, including surface normal estimation, semantic segmentation, and object detection. PanoRadar utilizes a rotating single-chip mmWave radar, along with a combination of novel signal processing and machine learning algorithms, to create high-resolution 3D images of the surroundings. Our system accurately estimates robot motion, allowing for coherent imaging through a dense grid of synthetic antennas. It also exploits the high azimuth resolution to enhance elevation resolution using learning-based methods. Furthermore, PanoRadar tackles 3D learning via 2D convolutions and addresses challenges due to the unique characteristics of RF signals. Our results demonstrate PanoRadar's robust performance across 12 buildings.
5/31/2024

Radar-Based Localization For Autonomous Ground Vehicles In Suburban Neighborhoods
Andrew J. Kramer, Christoffer Heckman
0
0
For autonomous ground vehicles (AGVs) deployed in suburban neighborhoods and other human-centric environments the problem of localization remains a fundamental challenge. There are well established methods for localization with GPS, lidar, and cameras. But even in ideal conditions these have limitations. GPS is not always available and is often not accurate enough on its own, visual methods have difficulty coping with appearance changes due to weather and other factors, and lidar methods are prone to defective solutions due to ambiguous scene geometry. Radar on the other hand is not highly susceptible to these problems, owing in part to its longer range. Further, radar is also robust to challenging conditions that interfere with vision and lidar including fog, smoke, rain, and darkness. We present a radar-based localization system that includes a novel method for highly-accurate radar odometry for smooth, high-frequency relative pose estimation and a novel method for radar-based place recognition and relocalization. We present experiments demonstrating our methods' accuracy and reliability, which are comparable with new{other methods' published results for radar localization and we find outperform a similar method as ours applied to lidar measurements}. Further, we show our methods are lightweight enough to run on common low-power embedded hardware with ample headroom for other autonomy functions.
5/2/2024

Scalable Radar-based Roadside Perception: Self-localization and Occupancy Heat Map for Traffic Analysis
Longfei Han, Qiuyu Xu, Klaus Kefferputz, Ying Lu, Gordon Elger, Jurgen Beyerer
0
0
4D mmWave radar sensors are suitable for roadside perception in city-scale Intelligent Transportation Systems (ITS) due to their long sensing range, weatherproof functionality, simple mechanical design, and low manufacturing cost. In this work, we investigate radar-based ITS for scalable traffic analysis. Localization of these radar sensors at city scale is a fundamental task in ITS. For flexible sensor setups, it requires even more effort. To address this task, we propose a self-localization approach that matches two descriptions of the road: the one from the geometry of the motion trajectories of cumulatively observed vehicles, and the other one from the aerial laser scan. An Iterative Closest Point (ICP) algorithm is used to register the motion trajectory in the road section of the laser scan. The resulting estimate of the transformation matrix represents the sensor pose in a global reference frame. We evaluate the results and show that it outperforms other map-based radar localization methods, especially for the orientation estimation. Beyond the localization result, we project radar sensor data onto a city-scale laser scan and generate a scalable occupancy heat map as a traffic analysis tool. This is demonstrated using two radar sensors monitoring an urban area in the real world.
4/23/2024

A Deep Automotive Radar Detector using the RaDelft Dataset
Ignacio Roldan, Andras Palffy, Julian F. P. Kooij, Dariu M. Gavrila, Francesco Fioranelli, Alexander Yarovoy
0
0
The detection of multiple extended targets in complex environments using high-resolution automotive radar is considered. A data-driven approach is proposed where unlabeled synchronized lidar data is used as ground truth to train a neural network with only radar data as input. To this end, the novel, large-scale, real-life, and multi-sensor RaDelft dataset has been recorded using a demonstrator vehicle in different locations in the city of Delft. The dataset, as well as the documentation and example code, is publicly available for those researchers in the field of automotive radar or machine perception. The proposed data-driven detector is able to generate lidar-like point clouds using only radar data from a high-resolution system, which preserves the shape and size of extended targets. The results are compared against conventional CFAR detectors as well as variations of the method to emulate the available approaches in the literature, using the probability of detection, the probability of false alarm, and the Chamfer distance as performance metrics. Moreover, an ablation study was carried out to assess the impact of Doppler and temporal information on detection performance. The proposed method outperforms the different baselines in terms of Chamfer distance, achieving a reduction of 75% against conventional CFAR detectors and 10% against the modified state-of-the-art deep learning-based approaches.
6/28/2024