Reinforced Model Predictive Control via Trust-Region Quasi-Newton Policy Optimization
2405.17983
0
0
📈
Abstract
Model predictive control can optimally deal with nonlinear systems under consideration of constraints. The control performance depends on the model accuracy and the prediction horizon. Recent advances propose to use reinforcement learning applied to a parameterized model predictive controller to recover the optimal control performance even if an imperfect model or short prediction horizons are used. However, common reinforcement learning algorithms rely on first order updates, which only have a linear convergence rate and hence need an excessive amount of dynamic data. Higher order updates are typically intractable if the policy is approximated with neural networks due to the large number of parameters. In this work, we use a parameterized model predictive controller as policy, and leverage the small amount of necessary parameters to propose a trust-region constrained Quasi-Newton training algorithm for policy optimization with a superlinear convergence rate. We show that the required second order derivative information can be calculated by the solution of a linear system of equations. A simulation study illustrates that the proposed training algorithm outperforms other algorithms in terms of data efficiency and accuracy.
Create account to get full access
Overview
- This paper presents a Reinforced Model Predictive Control (RMPC) algorithm that combines trust-region quasi-Newton optimization with model predictive control (MPC) to solve nonlinear optimal control problems.
- The proposed method, called Trust-Region Quasi-Newton Policy Optimization (TR-QNPO), aims to improve the sample efficiency and stability of MPC-based reinforcement learning approaches.
- The authors demonstrate the effectiveness of TR-QNPO on various control tasks, including a cart-pole swing-up problem and a quadrotor control task.
Plain English Explanation
The paper introduces a new approach called Reinforced Model Predictive Control (RMPC) that combines the strengths of model predictive control (MPC) and reinforcement learning (RL). MPC is a widely used control technique that optimizes a system's behavior by predicting its future state, but it can be computationally expensive and struggle with highly nonlinear systems. RL, on the other hand, can learn optimal control policies through trial and error, but it can be sample-inefficient and unstable.
The key idea behind RMPC is to use RL to improve the performance of MPC. Specifically, the authors propose a method called Trust-Region Quasi-Newton Policy Optimization (TR-QNPO), which uses a trust-region optimization algorithm and a quasi-Newton method to efficiently learn an optimal control policy. This allows the system to adapt to changes in the environment or uncertainties in the model, while still leveraging the predictive capabilities of MPC.
The authors demonstrate the effectiveness of TR-QNPO on several control tasks, including a cart-pole swing-up problem and a quadrotor control task. They show that TR-QNPO outperforms traditional MPC and RL approaches in terms of sample efficiency and stability, making it a promising technique for real-world control applications.
Technical Explanation
The paper introduces a Reinforced Model Predictive Control (RMPC) algorithm that combines trust-region quasi-Newton optimization with model predictive control (MPC) to solve nonlinear optimal control problems. The proposed method, called Trust-Region Quasi-Newton Policy Optimization (TR-QNPO), aims to improve the sample efficiency and stability of MPC-based reinforcement learning approaches.
The key aspects of the TR-QNPO algorithm are:
-
Trust-Region Optimization: The authors use a trust-region optimization algorithm to constrain the policy updates, which helps to stabilize the learning process and prevent large changes to the policy that could lead to poor performance.
-
Quasi-Newton Method: The authors employ a quasi-Newton method, specifically the Broyden-Fletcher-Goldfarb-Shanno (BFGS) algorithm, to efficiently compute the gradients and updates for the control policy.
-
MPC Integration: The TR-QNPO algorithm is integrated with a model predictive control (MPC) framework, which allows the system to leverage the predictive capabilities of MPC while adapting the control policy through reinforcement learning.
The authors evaluate the performance of TR-QNPO on several control tasks, including a cart-pole swing-up problem and a quadrotor control task. They compare the results to traditional MPC and reinforcement learning approaches, and demonstrate that TR-QNPO outperforms these methods in terms of sample efficiency and stability.
Critical Analysis
The authors have provided a well-designed and thorough evaluation of the TR-QNPO algorithm, but there are a few potential areas for further consideration:
-
Model Accuracy: The effectiveness of the RMPC approach is heavily dependent on the accuracy of the system model used for the MPC component. In real-world applications, model uncertainties and inaccuracies may pose challenges, and the authors do not explicitly address how the method would perform in the face of such uncertainties.
-
Computational Complexity: While the quasi-Newton method used in TR-QNPO is more efficient than traditional gradient-based approaches, the overall computational complexity of the algorithm may still be a concern, especially for high-dimensional or real-time control applications. The authors could provide a more detailed analysis of the computational requirements of their method.
-
Generalization: The authors demonstrate the effectiveness of TR-QNPO on a limited set of control tasks. It would be valuable to see how the method performs on a broader range of control problems, including those with different dynamics, constraints, or objective functions.
Despite these potential areas for further research, the TR-QNPO algorithm presented in this paper represents a promising approach to combining the strengths of MPC and reinforcement learning for nonlinear optimal control problems.
Conclusion
The paper introduces a novel Reinforced Model Predictive Control (RMPC) algorithm called Trust-Region Quasi-Newton Policy Optimization (TR-QNPO), which integrates trust-region quasi-Newton optimization with model predictive control to solve nonlinear optimal control problems. The authors demonstrate the effectiveness of TR-QNPO on various control tasks, showing that it outperforms traditional MPC and reinforcement learning approaches in terms of sample efficiency and stability.
The TR-QNPO method represents a significant contribution to the field of optimal control, as it combines the predictive capabilities of MPC with the adaptability of reinforcement learning, potentially opening up new avenues for real-world control applications. While there are some areas for further research and improvement, the paper provides a solid foundation for future work in this area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏅
MPC-Inspired Reinforcement Learning for Verifiable Model-Free Control
Yiwen Lu, Zishuo Li, Yihan Zhou, Na Li, Yilin Mo
0
0
In this paper, we introduce a new class of parameterized controllers, drawing inspiration from Model Predictive Control (MPC). The controller resembles a Quadratic Programming (QP) solver of a linear MPC problem, with the parameters of the controller being trained via Deep Reinforcement Learning (DRL) rather than derived from system models. This approach addresses the limitations of common controllers with Multi-Layer Perceptron (MLP) or other general neural network architecture used in DRL, in terms of verifiability and performance guarantees, and the learned controllers possess verifiable properties like persistent feasibility and asymptotic stability akin to MPC. On the other hand, numerical examples illustrate that the proposed controller empirically matches MPC and MLP controllers in terms of control performance and has superior robustness against modeling uncertainty and noises. Furthermore, the proposed controller is significantly more computationally efficient compared to MPC and requires fewer parameters to learn than MLP controllers. Real-world experiments on vehicle drift maneuvering task demonstrate the potential of these controllers for robotics and other demanding control tasks.
4/10/2024
Efficient model predictive control for nonlinear systems modelled by deep neural networks
Jianglin Lan
0
0
This paper presents a model predictive control (MPC) for dynamic systems whose nonlinearity and uncertainty are modelled by deep neural networks (NNs), under input and state constraints. Since the NN output contains a high-order complex nonlinearity of the system state and control input, the MPC problem is nonlinear and challenging to solve for real-time control. This paper proposes two types of methods for solving the MPC problem: the mixed integer programming (MIP) method which produces an exact solution to the nonlinear MPC, and linear relaxation (LR) methods which generally give suboptimal solutions but are much computationally cheaper. Extensive numerical simulation for an inverted pendulum system modelled by ReLU NNs of various sizes is used to demonstrate and compare performance of the MIP and LR methods.
5/20/2024
📈
Model predictive control-based value estimation for efficient reinforcement learning
Qizhen Wu, Kexin Liu, Lei Chen
0
0
Reinforcement learning suffers from limitations in real practices primarily due to the number of required interactions with virtual environments. It results in a challenging problem because we are implausible to obtain a local optimal strategy with only a few attempts for many learning methods. Hereby, we design an improved reinforcement learning method based on model predictive control that models the environment through a data-driven approach. Based on the learned environment model, it performs multi-step prediction to estimate the value function and optimize the policy. The method demonstrates higher learning efficiency, faster convergent speed of strategies tending to the local optimal value, and less sample capacity space required by experience replay buffers. Experimental results, both in classic databases and in a dynamic obstacle avoidance scenario for an unmanned aerial vehicle, validate the proposed approaches.
4/12/2024
Matrix Low-Rank Trust Region Policy Optimization
Sergio Rozada, Antonio G. Marques
0
0
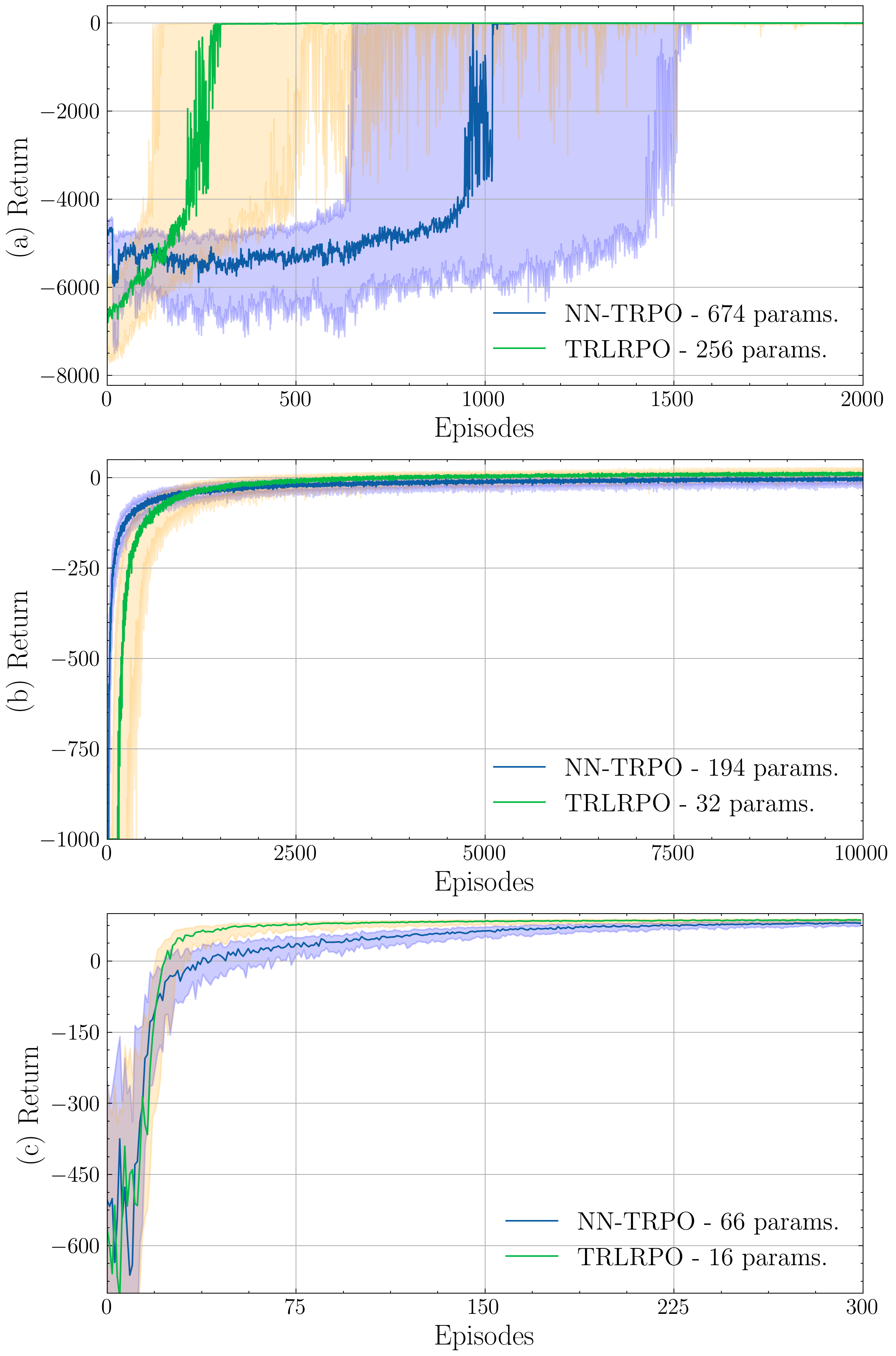
Most methods in reinforcement learning use a Policy Gradient (PG) approach to learn a parametric stochastic policy that maps states to actions. The standard approach is to implement such a mapping via a neural network (NN) whose parameters are optimized using stochastic gradient descent. However, PG methods are prone to large policy updates that can render learning inefficient. Trust region algorithms, like Trust Region Policy Optimization (TRPO), constrain the policy update step, ensuring monotonic improvements. This paper introduces low-rank matrix-based models as an efficient alternative for estimating the parameters of TRPO algorithms. By gathering the stochastic policy's parameters into a matrix and applying matrix-completion techniques, we promote and enforce low rank. Our numerical studies demonstrate that low-rank matrix-based policy models effectively reduce both computational and sample complexities compared to NN models, while maintaining comparable aggregated rewards.
5/29/2024