Reinforcement Learning Based Escape Route Generation in Low Visibility Environments

0

Sign in to get full access
Overview
- Presents a reinforcement learning approach for real-time generation of escape routes in low visibility environments
- Focuses on generating optimal escape routes in emergency situations where visibility is limited, such as during a fire or gas leak
- Leverages deep neural networks to learn effective navigation policies from simulated training data
Plain English Explanation
The paper explores using reinforcement learning, a type of machine learning, to help people find the best escape routes in emergency situations where visibility is poor, such as during a fire or gas leak. The key idea is to use computer simulations to train a deep neural network model on how to navigate through different low-visibility environments and find the fastest and safest escape routes.
The model learns by trial-and-error, getting feedback on whether the routes it chooses are good or bad. Over many simulated trials, it learns to identify the most optimal escape paths. Then, in a real emergency, this trained model can be used to quickly generate the best escape route for the current environment, even if it has poor visibility.
This could be very helpful for first responders or building occupants who need to evacuate quickly but can't easily see their surroundings. By tapping into the power of AI and simulations, this approach aims to improve emergency response and save lives in challenging situations.
Technical Explanation
The paper presents a reinforcement learning framework for generating real-time escape routes in low-visibility environments. The core idea is to train a deep neural network agent to navigate through simulated emergency environments and learn an optimal policy for finding the fastest escape route.
The agent is trained using proximal policy optimization, a reinforcement learning algorithm that iteratively improves the agent's policy by estimating the gradient of the expected return. The state representation includes the agent's position, orientation, and a 3D occupancy grid encoding the surrounding environment. The reward function encourages the agent to reach the exit quickly while avoiding obstacles.
During deployment, the trained agent can quickly generate an escape route for a new environment by inferring the optimal actions to take based on the current state observations. The authors demonstrate the effectiveness of their approach through extensive simulations in different emergency scenarios, showing that it can outperform traditional path planning methods in terms of evacuation time and safety.
Critical Analysis
The paper presents a compelling approach to a critical real-world problem, but there are some limitations and areas for further research that are worth considering.
One key limitation is the reliance on simulated training data, which may not fully capture the complexity and unpredictability of real-world emergency situations. While the authors attempt to model realistic environmental conditions, there could be significant discrepancies between the simulated and actual environments that affect the agent's performance.
Additionally, the paper does not address how the system would handle dynamic changes in the environment, such as the spread of a fire or the movement of other people. Incorporating real-time sensor data and adapting the escape route generation accordingly could be an important area for future work.
Another area for improvement is the scalability of the approach, particularly in larger or more crowded environments. The computational complexity of the reinforcement learning algorithm and the need to re-plan the escape route on the fly could pose challenges in high-stakes, time-critical situations.
Despite these limitations, the paper's core contribution of using reinforcement learning for real-time escape route generation in low-visibility environments is a valuable step forward. Continued research and validation in real-world settings could lead to significant advancements in emergency response and safety.
Conclusion
This paper presents a promising approach to a critical problem in emergency response - generating optimal escape routes in low-visibility environments. By leveraging reinforcement learning and deep neural networks, the proposed system can learn to navigate through simulated emergency scenarios and identify the fastest and safest evacuation paths.
While the reliance on simulated training data and the need for further validation in real-world settings are limitations, the paper's core contribution of using AI to improve emergency response has significant potential. As the field of reinforcement learning continues to advance, integrating these techniques into emergency planning and response systems could lead to substantial improvements in public safety and lives saved.
Overall, this research represents an important step forward in using cutting-edge AI techniques to address critical real-world challenges. As the technology matures and is further refined, it could have far-reaching implications for how we prepare for and respond to emergencies in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Reinforcement Learning Based Escape Route Generation in Low Visibility Environments
Hari Srikanth
Structure fires are responsible for the majority of fire-related deaths nationwide. In order to assist with the rapid evacuation of trapped people, this paper proposes the use of a system that determines optimal search paths for firefighters and exit paths for civilians in real time based on environmental measurements. Through the use of a LiDAR mapping system evaluated and verified by a trust range derived from sonar and smoke concentration data, a proposed solution to low visibility mapping is tested. These independent point clouds are then used to create distinct maps, which are merged through the use of a RANSAC based alignment methodology and simplified into a visibility graph. Temperature and humidity data are then used to label each node with a danger score, creating an environment tensor. After demonstrating how a Linear Function Approximation based Natural Policy Gradient RL methodology outperforms more complex competitors with respect to robustness and speed, this paper outlines two systems (savior and refugee) that process the environment tensor to create safe rescue and escape routes, respectively.
Read more6/13/2024
🤿
0
Deep Reinforcement Learning for Time-Critical Wilderness Search And Rescue Using Drones
Jan-Hendrik Ewers, David Anderson, Douglas Thomson
Traditional search and rescue methods in wilderness areas can be time-consuming and have limited coverage. Drones offer a faster and more flexible solution, but optimizing their search paths is crucial. This paper explores the use of deep reinforcement learning to create efficient search missions for drones in wilderness environments. Our approach leverages a priori data about the search area and the missing person in the form of a probability distribution map. This allows the deep reinforcement learning agent to learn optimal flight paths that maximize the probability of finding the missing person quickly. Experimental results show that our method achieves a significant improvement in search times compared to traditional coverage planning and search planning algorithms. In one comparison, deep reinforcement learning is found to outperform other algorithms by over $160%$, a difference that can mean life or death in real-world search operations. Additionally, unlike previous work, our approach incorporates a continuous action space enabled by cubature, allowing for more nuanced flight patterns.
Read more5/24/2024
0
Structured Graph Network for Constrained Robot Crowd Navigation with Low Fidelity Simulation
Shuijing Liu, Kaiwen Hong, Neeloy Chakraborty, Katherine Driggs-Campbell
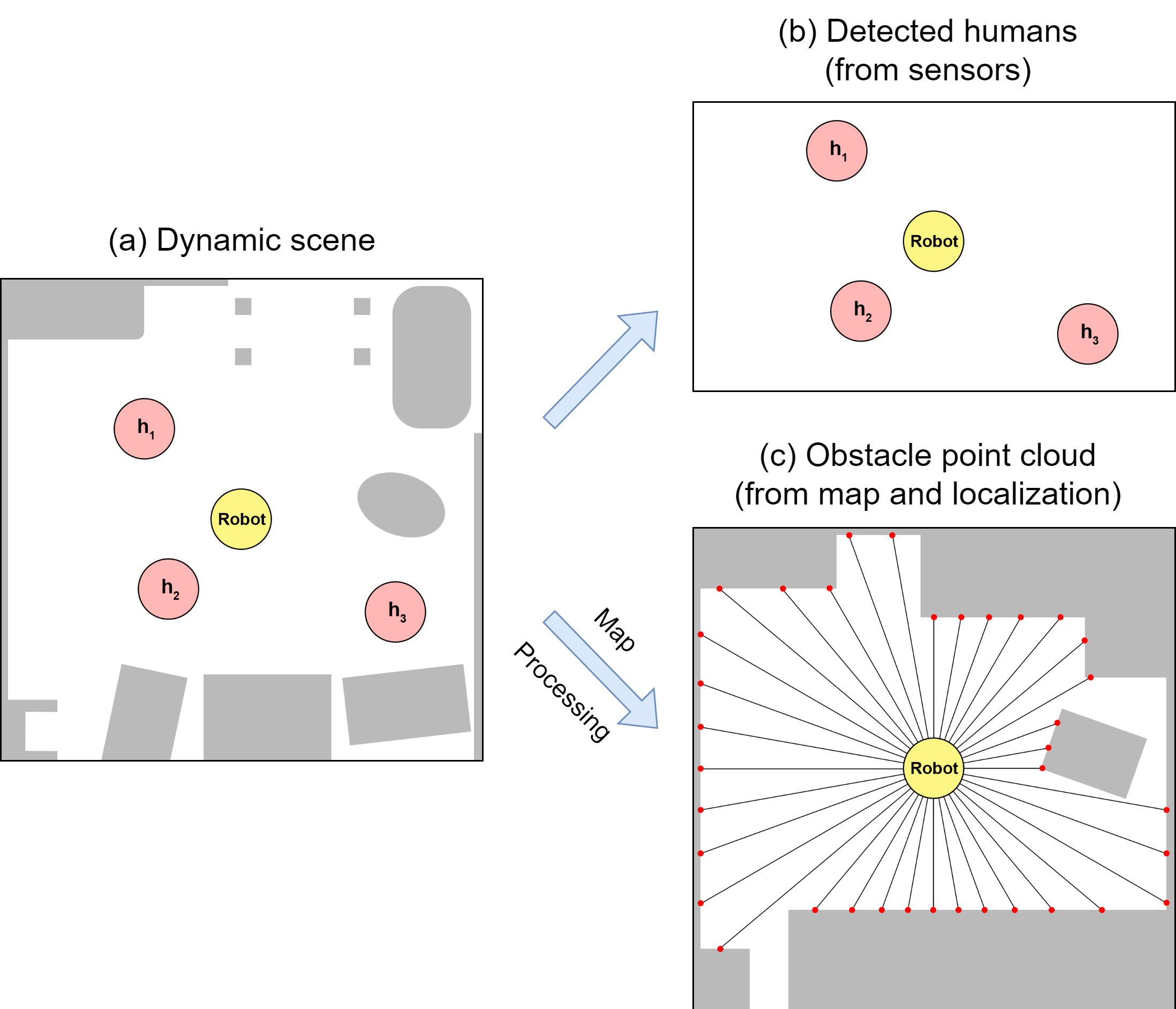
We investigate the feasibility of deploying reinforcement learning (RL) policies for constrained crowd navigation using a low-fidelity simulator. We introduce a representation of the dynamic environment, separating human and obstacle representations. Humans are represented through detected states, while obstacles are represented as computed point clouds based on maps and robot localization. This representation enables RL policies trained in a low-fidelity simulator to deploy in real world with a reduced sim2real gap. Additionally, we propose a spatio-temporal graph to model the interactions between agents and obstacles. Based on the graph, we use attention mechanisms to capture the robot-human, human-human, and human-obstacle interactions. Our method significantly improves navigation performance in both simulated and real-world environments. Video demonstrations can be found at https://sites.google.com/view/constrained-crowdnav/home.
Read more5/29/2024

0
TGS: Trajectory Generation and Selection using Vision Language Models in Mapless Outdoor Environments
Daeun Song, Jing Liang, Xuesu Xiao, Dinesh Manocha
We present a multi-modal trajectory generation and selection algorithm for real-world mapless outdoor navigation in challenging scenarios with unstructured off-road features like buildings, grass, and curbs. Our goal is to compute suitable trajectories that (1) satisfy the environment-specific traversability constraints and (2) generate human-like paths while navigating in crosswalks, sidewalks, etc. Our formulation uses a Conditional Variational Autoencoder (CVAE) generative model enhanced with traversability constraints to generate multiple candidate trajectories for global navigation. We use VLMs and a visual prompting approach with their zero-shot ability of semantic understanding and logical reasoning to choose the best trajectory given the contextual information about the task. We evaluate our methods in various outdoor scenes with wheeled robots and compare the performance with other global navigation algorithms. In practice, we observe at least 3.35% improvement in traversability and 20.61% improvement in terms of human-like navigation in generated trajectories in challenging outdoor navigation scenarios.
Read more8/9/2024