Reinforcement Learning with Non-Cumulative Objective
2307.04957
0
0

Abstract
In reinforcement learning, the objective is almost always defined as a emph{cumulative} function over the rewards along the process. However, there are many optimal control and reinforcement learning problems in various application fields, especially in communications and networking, where the objectives are not naturally expressed as summations of the rewards. In this paper, we recognize the prevalence of non-cumulative objectives in various problems, and propose a modification to existing algorithms for optimizing such objectives. Specifically, we dive into the fundamental building block for many optimal control and reinforcement learning algorithms: the Bellman optimality equation. To optimize a non-cumulative objective, we replace the original summation operation in the Bellman update rule with a generalized operation corresponding to the objective. Furthermore, we provide sufficient conditions on the form of the generalized operation as well as assumptions on the Markov decision process under which the globally optimal convergence of the generalized Bellman updates can be guaranteed. We demonstrate the idea experimentally with the bottleneck objective, i.e., the objectives determined by the minimum reward along the process, on classical optimal control and reinforcement learning tasks, as well as on two network routing problems on maximizing the flow rates.
Create account to get full access
Overview
- Explores a new type of reinforcement learning problem with a non-cumulative objective function
- Focuses on wireless network routing as a motivating application
- Proposes a novel approach to solve this problem and provides theoretical guarantees
Plain English Explanation
The paper examines a reinforcement learning problem with a unique twist - instead of the typical cumulative objective where the goal is to maximize the total reward over time, the objective is non-cumulative. In other words, the goal is to optimize a different type of reward at each time step, rather than accumulating the same reward.
As a motivating application, the researchers consider a wireless network routing problem. The idea is that at each time step, the network needs to route data packets to different destinations, and the objective is to minimize the delay experienced by each packet, rather than minimizing the overall delay across all packets. This non-cumulative objective is more suitable for certain real-world applications where the focus is on optimizing individual outcomes rather than aggregate performance.
To solve this problem, the researchers propose a novel approach that builds upon reinforcement learning techniques. Their method aims to find an optimal policy that can navigate the non-cumulative objective efficiently, while also providing theoretical guarantees on the quality of the solution.
Technical Explanation
The paper formulates the non-cumulative reinforcement learning problem as a Markov Decision Process (MDP), where the goal is to find an optimal policy that minimizes the non-cumulative objective. This is in contrast to the traditional reinforcement learning setting, where the objective is to maximize the cumulative reward over time.
The researchers propose a novel algorithm called "Non-Cumulative Reinforcement Learning" (NCRL) to solve this problem. NCRL combines elements of model-based reinforcement learning and multi-objective reinforcement learning to efficiently navigate the non-cumulative objective landscape.
The key insights of the paper include:
- Theoretical analysis showing that NCRL converges to the optimal policy under certain conditions
- Demonstration of NCRL's effectiveness in the wireless network routing problem, where it outperforms traditional reinforcement learning approaches
- Discussion of the broader applicability of non-cumulative objectives in real-world scenarios, such as robustness and fairness optimization
Critical Analysis
The paper presents a novel and interesting formulation of the reinforcement learning problem, which expands the traditional cumulative objective setting to a non-cumulative one. This opens up new possibilities for applying reinforcement learning to problems where the goal is to optimize individual outcomes rather than aggregate performance.
However, the paper does not address some potential limitations of the non-cumulative objective. For example, it is not clear how to handle cases where there is a strong correlation between the non-cumulative rewards at different time steps, or when the individual rewards have varying degrees of importance. Additionally, the theoretical analysis relies on several assumptions, such as the MDP being ergodic, which may not always hold in practical scenarios.
Further research could explore ways to relax these assumptions and develop more robust algorithms for non-cumulative reinforcement learning problems. Additionally, it would be interesting to see how the proposed approach performs on a wider range of applications beyond the wireless network routing example.
Conclusion
This paper presents a novel formulation of the reinforcement learning problem with a non-cumulative objective, which expands the traditional scope of the field. The proposed NCRL algorithm provides a way to efficiently solve this type of problem, with theoretical guarantees on the quality of the solution.
The key insight is that by focusing on optimizing individual outcomes rather than aggregate performance, reinforcement learning can be applied to a wider range of real-world problems, such as wireless network routing, where fairness and robustness are crucial considerations. This work opens up new avenues for further research and practical applications of reinforcement learning in diverse domains.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏅
Tackling Decision Processes with Non-Cumulative Objectives using Reinforcement Learning
Maximilian Nagele, Jan Olle, Thomas Fosel, Remmy Zen, Florian Marquardt
0
0
Markov decision processes (MDPs) are used to model a wide variety of applications ranging from game playing over robotics to finance. Their optimal policy typically maximizes the expected sum of rewards given at each step of the decision process. However, a large class of problems does not fit straightforwardly into this framework: Non-cumulative Markov decision processes (NCMDPs), where instead of the expected sum of rewards, the expected value of an arbitrary function of the rewards is maximized. Example functions include the maximum of the rewards or their mean divided by their standard deviation. In this work, we introduce a general mapping of NCMDPs to standard MDPs. This allows all techniques developed to find optimal policies for MDPs, such as reinforcement learning or dynamic programming, to be directly applied to the larger class of NCMDPs. Focusing on reinforcement learning, we show applications in a diverse set of tasks, including classical control, portfolio optimization in finance, and discrete optimization problems. Given our approach, we can improve both final performance and training time compared to relying on standard MDPs.
5/24/2024
An approach to improve agent learning via guaranteeing goal reaching in all episodes
Pavel Osinenko, Grigory Yaremenko, Georgiy Malaniya, Anton Bolychev
0
0
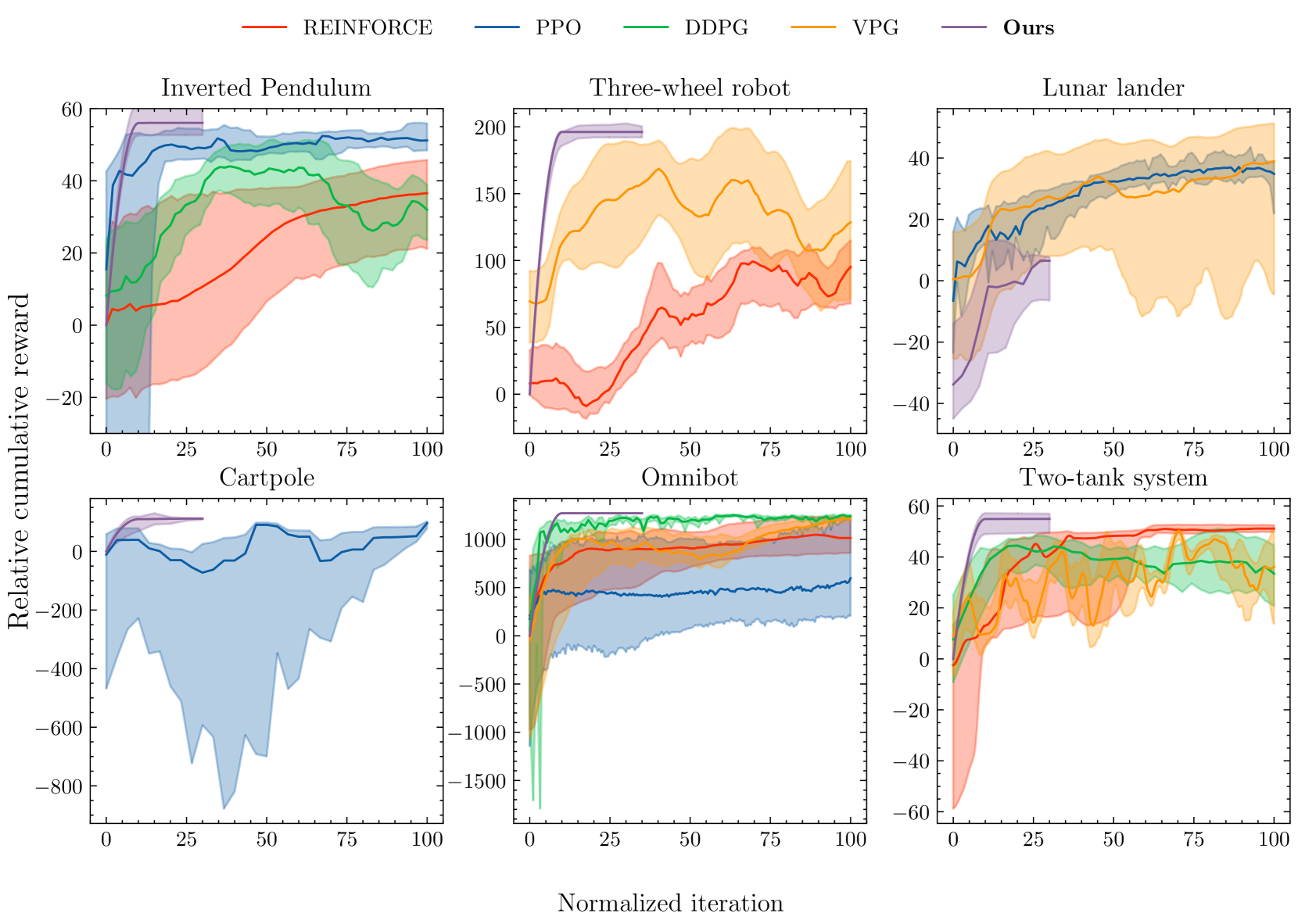
Reinforcement learning is commonly concerned with problems of maximizing accumulated rewards in Markov decision processes. Oftentimes, a certain goal state or a subset of the state space attain maximal reward. In such a case, the environment may be considered solved when the goal is reached. Whereas numerous techniques, learning or non-learning based, exist for solving environments, doing so optimally is the biggest challenge. Say, one may choose a reward rate which penalizes the action effort. Reinforcement learning is currently among the most actively developed frameworks for solving environments optimally by virtue of maximizing accumulated reward, in other words, returns. Yet, tuning agents is a notoriously hard task as reported in a series of works. Our aim here is to help the agent learn a near-optimal policy efficiently while ensuring a goal reaching property of some basis policy that merely solves the environment. We suggest an algorithm, which is fairly flexible, and can be used to augment practically any agent as long as it comprises of a critic. A formal proof of a goal reaching property is provided. Simulation experiments on six problems under five agents, including the benchmarked one, provided an empirical evidence that the learning can indeed be boosted while ensuring goal reaching property.
5/30/2024
🧠
Two Complementary Perspectives to Continual Learning: Ask Not Only What to Optimize, But Also How
Timm Hess, Tinne Tuytelaars, Gido M. van de Ven
0
0
Recent years have seen considerable progress in the continual training of deep neural networks, predominantly thanks to approaches that add replay or regularization terms to the loss function to approximate the joint loss over all tasks so far. However, we show that even with a perfect approximation to the joint loss, these approaches still suffer from temporary but substantial forgetting when starting to train on a new task. Motivated by this 'stability gap', we propose that continual learning strategies should focus not only on the optimization objective, but also on the way this objective is optimized. While there is some continual learning work that alters the optimization trajectory (e.g., using gradient projection techniques), this line of research is positioned as alternative to improving the optimization objective, while we argue it should be complementary. In search of empirical support for our proposition, we perform a series of pre-registered experiments combining replay-approximated joint objectives with gradient projection-based optimization routines. However, this first experimental attempt fails to show clear and consistent benefits. Nevertheless, our conceptual arguments, as well as some of our empirical results, demonstrate the distinctive importance of the optimization trajectory in continual learning, thereby opening up a new direction for continual learning research.
6/24/2024
🏅
Robust Reinforcement Learning Objectives for Sequential Recommender Systems
Melissa Mozifian, Tristan Sylvain, Dave Evans, Lili Meng
0
0
Attention-based sequential recommendation methods have shown promise in accurately capturing users' evolving interests from their past interactions. Recent research has also explored the integration of reinforcement learning (RL) into these models, in addition to generating superior user representations. By framing sequential recommendation as an RL problem with reward signals, we can develop recommender systems that incorporate direct user feedback in the form of rewards, enhancing personalization for users. Nonetheless, employing RL algorithms presents challenges, including off-policy training, expansive combinatorial action spaces, and the scarcity of datasets with sufficient reward signals. Contemporary approaches have attempted to combine RL and sequential modeling, incorporating contrastive-based objectives and negative sampling strategies for training the RL component. In this work, we further emphasize the efficacy of contrastive-based objectives paired with augmentation to address datasets with extended horizons. Additionally, we recognize the potential instability issues that may arise during the application of negative sampling. These challenges primarily stem from the data imbalance prevalent in real-world datasets, which is a common issue in offline RL contexts. Furthermore, we introduce an enhanced methodology aimed at providing a more effective solution to these challenges. Experimental results across several real datasets show our method with increased robustness and state-of-the-art performance.
4/19/2024