Relevance-driven Decision Making for Safer and More Efficient Human Robot Collaboration

0
Sign in to get full access
Overview
- This paper presents a relevance-driven decision-making framework for safer and more efficient human-robot collaboration.
- The key idea is to enable robots to make decisions based on the relevance of their actions to the human's intended task, rather than just following a pre-programmed sequence of steps.
- This approach aims to improve safety, flexibility, and efficiency in human-robot interactions.
Plain English Explanation
The paper discusses a new way for robots to make decisions when working alongside humans. Typically, robots follow a fixed set of instructions without much awareness of the human's overall task or goals. In contrast, the approach described in this paper allows robots to dynamically assess the relevance of their actions to the human's intended objective.
By understanding the context and relevance of their actions, robots can make more informed decisions about how to best assist the human. This could lead to safer and more efficient collaboration, as the robot can adapt its behavior to the specific needs of the situation.
For example, imagine a robot assisting a human in assembling furniture. Rather than just blindly following a pre-programmed assembly sequence, the robot could monitor the human's progress and selectively perform tasks that are most relevant to the current stage of the overall assembly process. This relevance-driven approach can help avoid unnecessary or potentially dangerous actions, leading to a smoother and more collaborative workflow.
Technical Explanation
The paper presents a framework for relevance-driven decision making in human-robot collaboration. The key components of this framework include:
-
Relevance Modeling: The robot maintains a model of the relevance of its actions to the human's intended task. This relevance model is updated dynamically based on the current state of the collaboration.
-
Decision-Making: The robot uses the relevance model to guide its decision-making, selecting actions that are most relevant to the human's goals and the current state of the task.
-
Safety Monitoring: The framework also includes a safety monitoring component that assesses the potential risks of the robot's actions and takes appropriate measures to ensure the safety of the human.
The authors demonstrate the effectiveness of this approach through simulations and user studies, showing that it can lead to safer and more efficient human-robot collaboration compared to traditional methods.
Critical Analysis
The paper presents a promising approach to improving human-robot collaboration, but there are a few potential limitations and areas for further research:
-
Real-World Implementation: While the simulations and user studies provide promising results, the authors acknowledge the need for further validation in real-world, complex environments. Deploying this framework in realistic settings may introduce additional challenges that were not captured in the experiments.
-
Human Trust and Acceptance: For this relevance-driven approach to be effective, humans must trust the robot's decision-making capabilities and be willing to cede some control. Ensuring user acceptance and trust in the system is an important consideration that warrants further investigation.
-
Generalization to Various Tasks: The paper focuses on a specific task of furniture assembly. It would be valuable to explore how well the relevance-driven framework can generalize to a wider range of human-robot collaboration scenarios, such as manufacturing, healthcare, or service tasks.
Overall, the paper presents an interesting and well-designed approach to enhancing human-robot collaboration, but more research is needed to fully understand its limitations and potential real-world implications.
Conclusion
This paper introduces a relevance-driven decision-making framework for safer and more efficient human-robot collaboration. By enabling robots to dynamically assess the relevance of their actions to the human's intended task, this approach aims to improve the flexibility, safety, and efficiency of human-robot interactions.
The technical implementation and experimental results are promising, but further research is needed to address potential limitations, such as real-world deployment challenges and ensuring human trust and acceptance. If successfully developed and deployed, this relevance-driven approach could have significant implications for a wide range of human-robot collaboration applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Relevance-driven Decision Making for Safer and More Efficient Human Robot Collaboration
Xiaotong Zhang, Dingcheng Huang, Kamal Youcef-Toumi
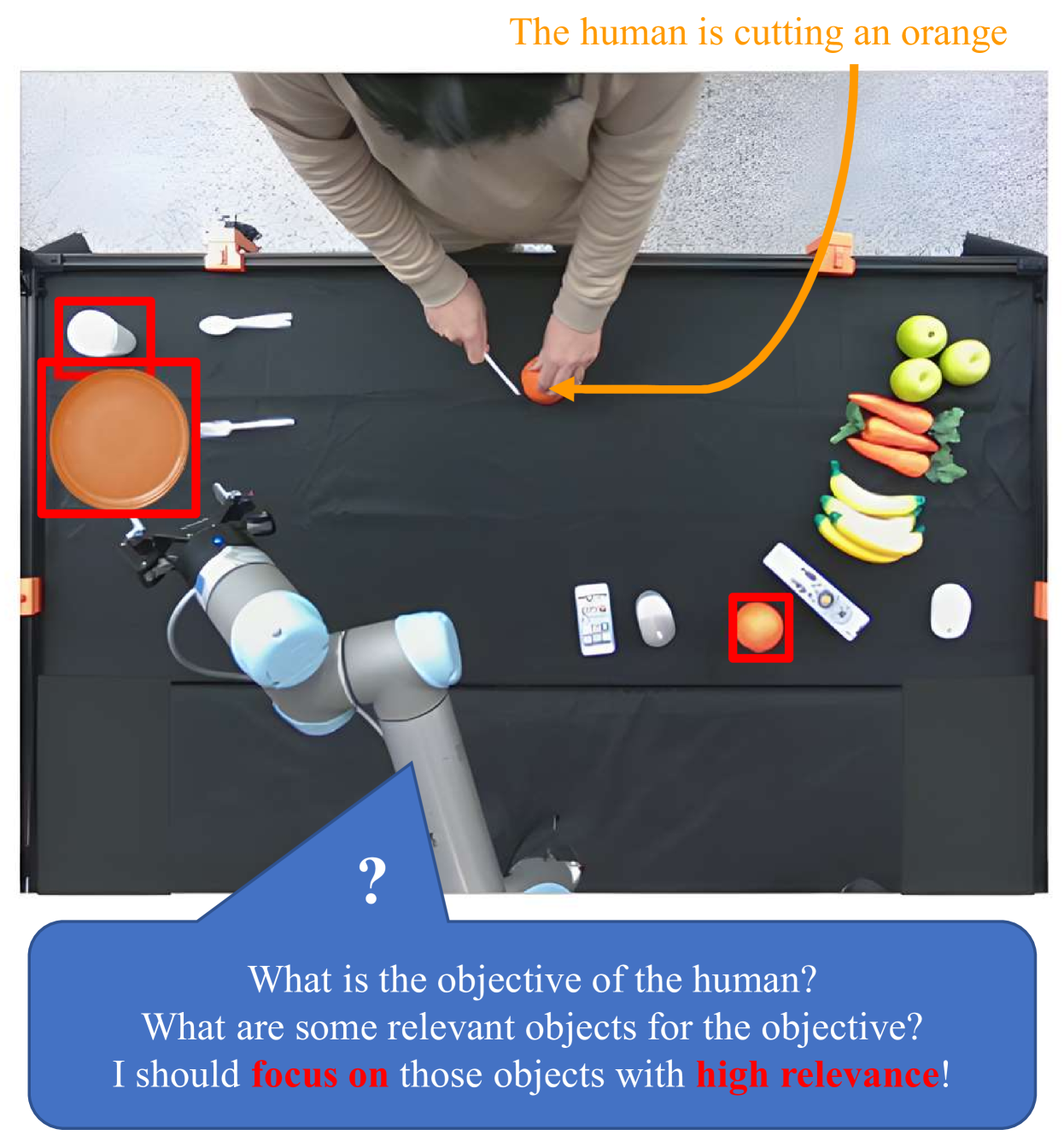
Human intelligence possesses the ability to effectively focus on important environmental components, which enhances perception, learning, reasoning, and decision-making. Inspired by this cognitive mechanism, we introduced a novel concept termed relevance for Human-Robot Collaboration (HRC). Relevance is defined as the importance of the objects based on the applicability and pertinence of the objects for the human objective or other factors. In this paper, we further developed a novel two-loop framework integrating real-time and asynchronous processing to quantify relevance and apply relevance for safer and more efficient HRC. The asynchronous loop leverages the world knowledge from an LLM and quantifies relevance, and the real-time loop executes scene understanding, human intent prediction, and decision-making based on relevance. In decision making, we proposed and developed a human robot task allocation method based on relevance and a novel motion generation and collision avoidance methodology considering the prediction of human trajectory. Simulations and experiments show that our methodology for relevance quantification can accurately and robustly predict the human objective and relevance, with an average accuracy of up to 0.90 for objective prediction and up to 0.96 for relevance prediction. Moreover, our motion generation methodology reduces collision cases by 63.76% and collision frames by 44.74% when compared with a state-of-the-art (SOTA) collision avoidance method. Our framework and methodologies, with relevance, guide the robot on how to best assist humans and generate safer and more efficient actions for HRC.
Read more9/24/2024

0
Relevance for Human Robot Collaboration
Xiaotong Zhang, Dingcheng Huang, Kamal Youcef-Toumi
Effective human-robot collaboration (HRC) requires the robots to possess human-like intelligence. Inspired by the human's cognitive ability to selectively process and filter elements in complex environments, this paper introduces a novel concept and scene-understanding approach termed `relevance.' It identifies relevant components in a scene. To accurately and efficiently quantify relevance, we developed an event-based framework that selectively triggers relevance determination, along with a probabilistic methodology built on a structured scene representation. Simulation results demonstrate that the relevance framework and methodology accurately predict the relevance of a general HRC setup, achieving a precision of 0.99 and a recall of 0.94. Relevance can be broadly applied to several areas in HRC to improve task planning time by 79.56% compared with pure planning for a cereal task, reduce perception latency by up to 26.53% for an object detector, improve HRC safety by up to 13.50% and reduce the number of inquiries for HRC by 75.36%. A real-world demonstration showcases the relevance framework's ability to intelligently assist humans in everyday tasks.
Read more9/14/2024
0
New!Bayesian Intention for Enhanced Human Robot Collaboration
Vanessa Hernandez-Cruz, Xiaotong Zhang, Kamal Youcef-Toumi
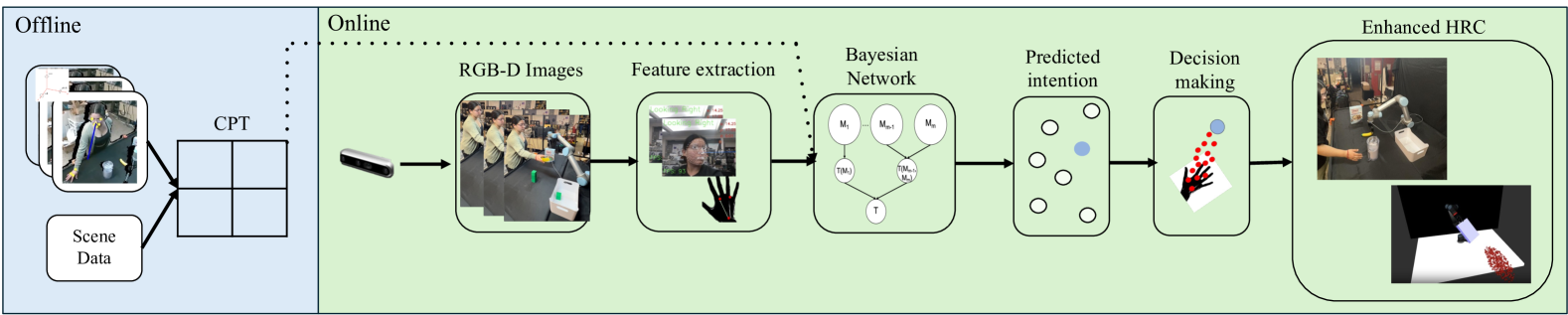
Predicting human intent is challenging yet essential to achieving seamless Human-Robot Collaboration (HRC). Many existing approaches fail to fully exploit the inherent relationships between objects, tasks, and the human model. Current methods for predicting human intent, such as Gaussian Mixture Models (GMMs) and Conditional Random Fields (CRFs), often lack interpretability due to their failure to account for causal relationships between variables. To address these challenges, in this paper, we developed a novel Bayesian Intention (BI) framework to predict human intent within a multi-modality information framework in HRC scenarios. This framework captures the complexity of intent prediction by modeling the correlations between human behavior conventions and scene data. Our framework leverages these inferred intent predictions to optimize the robot's response in real-time, enabling smoother and more intuitive collaboration. We demonstrate the effectiveness of our approach through a HRC task involving a UR5 robot, highlighting BI's capability for real-time human intent prediction and collision avoidance using a unique dataset we created. Our evaluations show that the multi-modality BI model predicts human intent within 2.69ms, with a 36% increase in precision, a 60% increase in F1 Score, and an 85% increase in accuracy compared to its best baseline method. The results underscore BI's potential to advance real-time human intent prediction and collision avoidance, making a significant contribution to the field of HRC.
Read more10/2/2024
🔮
0
Towards Proactive Safe Human-Robot Collaborations via Data-Efficient Conditional Behavior Prediction
Ravi Pandya, Zhuoyuan Wang, Yorie Nakahira, Changliu Liu
We focus on the problem of how we can enable a robot to collaborate seamlessly with a human partner, specifically in scenarios where preexisting data is sparse. Much prior work in human-robot collaboration uses observational models of humans (i.e. models that treat the robot purely as an observer) to choose the robot's behavior, but such models do not account for the influence the robot has on the human's actions, which may lead to inefficient interactions. We instead formulate the problem of optimally choosing a collaborative robot's behavior based on a conditional model of the human that depends on the robot's future behavior. First, we propose a novel model-based formulation of conditional behavior prediction that allows the robot to infer the human's intentions based on its future plan in data-sparse environments. We then show how to utilize a conditional model for proactive goal selection and safe trajectory generation around human collaborators. Finally, we use our proposed proactive controller in a collaborative task with real users to show that it can improve users' interactions with a robot collaborator quantitatively and qualitatively.
Read more7/2/2024