Towards Proactive Safe Human-Robot Collaborations via Data-Efficient Conditional Behavior Prediction

0
🔮
Sign in to get full access
Overview
- This paper explores how a robot can collaborate seamlessly with a human partner, particularly in scenarios where there is limited prior data available.
- The researchers propose a novel model-based approach that allows the robot to predict the human's intentions based on the robot's future behavior, rather than just observing the human's actions.
- The paper demonstrates how this conditional model can be used for proactive goal selection and safe trajectory generation, improving the overall quality of human-robot collaboration.
Plain English Explanation
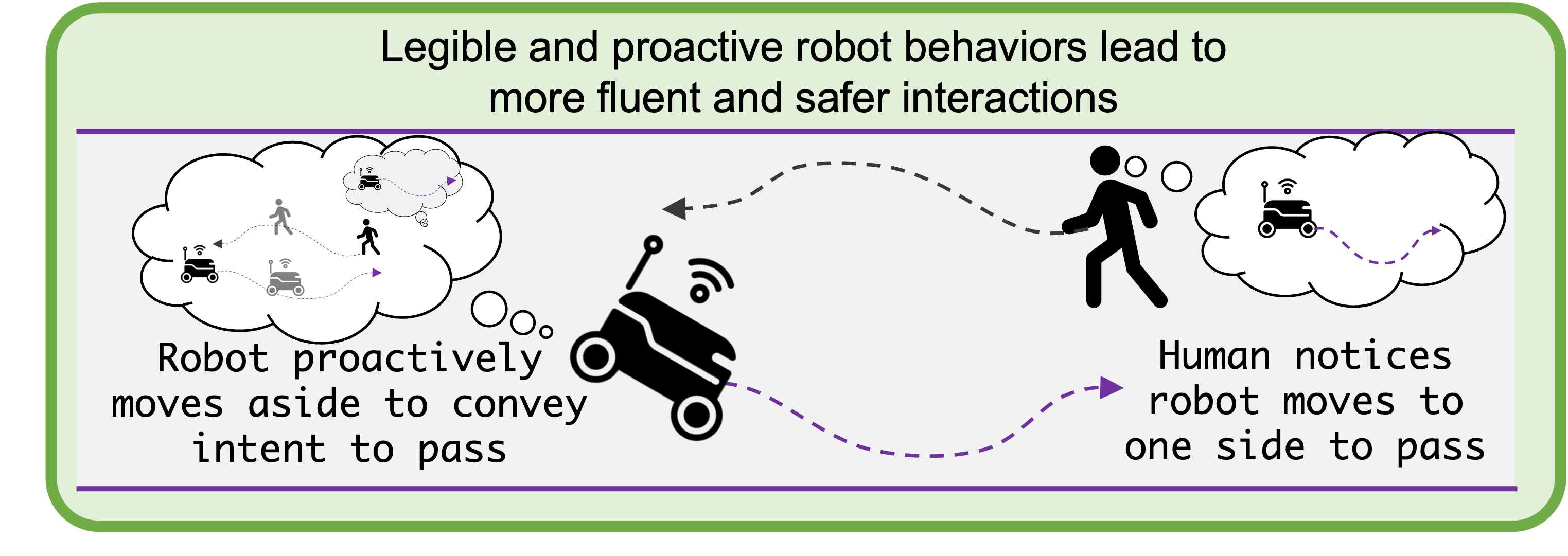
The researchers are working on a challenge that many robotics teams face: how can a robot work closely with a human in a way that feels natural and efficient, even when there isn't much existing data about how they might interact? Legible Proactive Robot Planning for Prosocial Human-Robot Collaboration proposes an approach that flips the typical script.
Instead of the robot just watching the human and trying to figure out what they'll do next, this model allows the robot to consider how its own future actions might influence the human's behavior. By using a "conditional model" that predicts the human's intentions based on the robot's plans, the robot can make more strategic choices about how to collaborate.
For example, if the robot knows that a certain action of its own is likely to confuse or frustrate the human, it can proactively adjust its plan to avoid that outcome. Or if the robot sees an opportunity to take an action that will make the human's job easier, it can choose to do so. This allows for a more seamless, productive partnership.
The researchers tested this approach in a real-world collaborative task, and found that it led to quantitative and qualitative improvements in the humans' experiences working with the robot. Interact-Transformer Models for Human Intent Prediction Conditioned on Robot Plans and Anticipate, Collaborate, and Act: Data-Driven Task Anticipation for Efficient Human-Robot Collaboration provide additional relevant background on related work in this area.
Technical Explanation
The core of this paper is a novel "model-based formulation of conditional behavior prediction" that allows a robot to infer the human's intentions based on the robot's own future actions, rather than just observing the human.
This is a departure from much prior work in human-robot collaboration, which has focused on observational models of human behavior. Those models treat the robot as a passive observer, but don't account for the way the robot's actions can influence the human.
The researchers' conditional model, on the other hand, takes into account how the robot's future behavior might impact the human's actions. This enables the robot to make more strategic, proactive choices about how to collaborate.
The paper demonstrates how this conditional model can be used for two key capabilities: proactive goal selection and safe trajectory generation. For goal selection, the robot can use the model to anticipate how different potential actions on its part might affect the human, and choose the one that will lead to the most effective collaboration.
And for trajectory generation, the robot can use the model to plan paths that are not only safe for the human, but also legible and easy for the human to understand and work with. Motion Prediction with Gaussian Processes for Safe Human-Robot Collaboration provides relevant background on safe trajectory planning.
The researchers tested this approach in a real-world collaborative task, and found that it led to quantitative and qualitative improvements in the humans' experiences working with the robot, compared to a more traditional observational model. This suggests that this conditional modeling approach has promise for enabling more seamless, effective human-robot collaboration, even in data-sparse environments.
Critical Analysis
The paper makes a compelling case for the value of this conditional modeling approach, but it's important to note some potential limitations and areas for further research.
For one, the experiments were conducted in a relatively constrained, lab-like setting. It's unclear how well the approach would scale to more complex, real-world scenarios with more uncertainty and variability. The researchers acknowledge this as an area for future work.
Additionally, the paper doesn't delve deeply into potential ethical or societal implications of this technology. As robots become more capable of anticipating and influencing human behavior, there could be concerns around privacy, autonomy, or the potential for manipulation. HOI4Bot: Human-Object Interaction Anticipation for Efficient Human-Robot Collaboration touches on some relevant considerations around human-robot interaction.
Overall, though, this paper represents an important step forward in enabling more seamless, effective collaboration between humans and robots. By shifting the focus from passive observation to strategic, conditional modeling, it opens up new possibilities for robots to work alongside people in more natural, supportive ways.
Conclusion
This paper presents a novel approach to human-robot collaboration that allows the robot to proactively plan its actions based on how they might influence the human's behavior. By using a conditional model that predicts the human's intentions based on the robot's future plans, the robot can make more strategic choices to optimize the collaboration.
The researchers demonstrated the benefits of this approach in a real-world task, showing quantitative and qualitative improvements in the humans' experiences working with the robot. While there are some limitations and areas for further research, this work represents an important step forward in enabling robots to collaborate more seamlessly and effectively with human partners, even in data-sparse environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔮
0
Towards Proactive Safe Human-Robot Collaborations via Data-Efficient Conditional Behavior Prediction
Ravi Pandya, Zhuoyuan Wang, Yorie Nakahira, Changliu Liu
We focus on the problem of how we can enable a robot to collaborate seamlessly with a human partner, specifically in scenarios where preexisting data is sparse. Much prior work in human-robot collaboration uses observational models of humans (i.e. models that treat the robot purely as an observer) to choose the robot's behavior, but such models do not account for the influence the robot has on the human's actions, which may lead to inefficient interactions. We instead formulate the problem of optimally choosing a collaborative robot's behavior based on a conditional model of the human that depends on the robot's future behavior. First, we propose a novel model-based formulation of conditional behavior prediction that allows the robot to infer the human's intentions based on its future plan in data-sparse environments. We then show how to utilize a conditional model for proactive goal selection and safe trajectory generation around human collaborators. Finally, we use our proposed proactive controller in a collaborative task with real users to show that it can improve users' interactions with a robot collaborator quantitatively and qualitatively.
Read more7/2/2024
0
Legible and Proactive Robot Planning for Prosocial Human-Robot Interactions
Jasper Geldenbott, Karen Leung
Humans have a remarkable ability to fluently engage in joint collision avoidance in crowded navigation tasks despite the complexities and uncertainties inherent in human behavior. Underlying these interactions is a mutual understanding that (i) individuals are prosocial, that is, there is equitable responsibility in avoiding collisions, and (ii) individuals should behave legibly, that is, move in a way that clearly conveys their intent to reduce ambiguity in how they intend to avoid others. Toward building robots that can safely and seamlessly interact with humans, we propose a general robot trajectory planning framework for synthesizing legible and proactive behaviors and demonstrate that our robot planner naturally leads to prosocial interactions. Specifically, we introduce the notion of a markup factor to incentivize legible and proactive behaviors and an inconvenience budget constraint to ensure equitable collision avoidance responsibility. We evaluate our approach against well-established multi-agent planning algorithms and show that using our approach produces safe, fluent, and prosocial interactions. We demonstrate the real-time feasibility of our approach with human-in-the-loop simulations. Project page can be found at https://uw-ctrl.github.io/phri/.
Read more4/8/2024
🔮
0
InteRACT: Transformer Models for Human Intent Prediction Conditioned on Robot Actions
Kushal Kedia, Atiksh Bhardwaj, Prithwish Dan, Sanjiban Choudhury
In collaborative human-robot manipulation, a robot must predict human intents and adapt its actions accordingly to smoothly execute tasks. However, the human's intent in turn depends on actions the robot takes, creating a chicken-or-egg problem. Prior methods ignore such inter-dependency and instead train marginal intent prediction models independent of robot actions. This is because training conditional models is hard given a lack of paired human-robot interaction datasets. Can we instead leverage large-scale human-human interaction data that is more easily accessible? Our key insight is to exploit a correspondence between human and robot actions that enables transfer learning from human-human to human-robot data. We propose a novel architecture, InteRACT, that pre-trains a conditional intent prediction model on large human-human datasets and fine-tunes on a small human-robot dataset. We evaluate on a set of real-world collaborative human-robot manipulation tasks and show that our conditional model improves over various marginal baselines. We also introduce new techniques to tele-operate a 7-DoF robot arm and collect a diverse range of human-robot collaborative manipulation data, which we open-source.
Read more6/4/2024
0
Anticipate & Collab: Data-driven Task Anticipation and Knowledge-driven Planning for Human-robot Collaboration
Shivam Singh, Karthik Swaminathan, Raghav Arora, Ramandeep Singh, Ahana Datta, Dipanjan Das, Snehasis Banerjee, Mohan Sridharan, Madhava Krishna
An agent assisting humans in daily living activities can collaborate more effectively by anticipating upcoming tasks. Data-driven methods represent the state of the art in task anticipation, planning, and related problems, but these methods are resource-hungry and opaque. Our prior work introduced a proof of concept framework that used an LLM to anticipate 3 high-level tasks that served as goals for a classical planning system that computed a sequence of low-level actions for the agent to achieve these goals. This paper describes DaTAPlan, our framework that significantly extends our prior work toward human-robot collaboration. Specifically, DaTAPlan planner computes actions for an agent and a human to collaboratively and jointly achieve the tasks anticipated by the LLM, and the agent automatically adapts to unexpected changes in human action outcomes and preferences. We evaluate DaTAPlan capabilities in a realistic simulation environment, demonstrating accurate task anticipation, effective human-robot collaboration, and the ability to adapt to unexpected changes. Project website: https://dataplan-hrc.github.io
Read more4/5/2024