Retrieval-Augmented Embodied Agents

0

Sign in to get full access
Overview
- This paper explores the concept of "retrieval-augmented embodied agents", which combines deep learning models with information retrieval to enhance the capabilities of agents operating in physical environments.
- The key idea is to enable agents to efficiently explore their surroundings, describe scenes in detail, and reason about their actions by leveraging relevant information from a knowledge base.
- The paper presents several novel approaches that integrate retrieval-based reasoning into embodied agents, demonstrating improved performance on tasks like navigation, scene understanding, and captioning.
Plain English Explanation
The researchers in this paper are trying to create smarter robots and virtual agents that can better understand and interact with their physical environments. Typical AI agents rely solely on deep learning models, which can struggle with tasks that require a lot of knowledge or reasoning.
To address this, the researchers propose "retrieval-augmented embodied agents" - agents that combine deep learning with the ability to quickly search through and retrieve relevant information from a database or knowledge base. This allows the agents to access a wider range of knowledge and capabilities beyond what's directly encoded in their neural networks.
For example, a retrieval-augmented agent navigating through a building might use its deep learning model to perceive its surroundings and plan a path, but then supplement that with information retrieved about the building's layout, features, and purpose. This helps the agent explore more efficiently and reason about the best actions to take.
Similarly, when describing a scene, the agent can pull in relevant facts, concepts, and even images from its knowledge base to generate more detailed and informative captions. The key is this hybrid approach that leverages both learned skills and external knowledge.
The paper demonstrates several implementations of this retrieval-augmented idea, showing how it can improve an agent's performance on tasks like navigation, scene understanding, and captioning. The goal is to create AI systems that can interact with the physical world in smarter, more capable ways by drawing upon a broad base of relevant information.
Technical Explanation
The paper introduces the concept of "retrieval-augmented embodied agents", which combine deep learning models with information retrieval to enhance the capabilities of agents operating in physical environments.
One approach presented is Explore, Explain, Self-Supervised Navigation Recounting, which integrates retrieval-based reasoning into an agent's navigation and scene description abilities. The agent uses a deep learning model to perceive its surroundings and plan a path, but then supplements this with relevant information retrieved from a knowledge base to better understand the environment and explain its actions.
Another method, Self-Explainable Affordance Learning for Embodied Caption, leverages retrieval to enable an agent to generate more detailed and informative captions for scenes. The agent draws upon retrieved visual concepts, relationships, and textual descriptions to produce richer scene descriptions.
The paper also discusses MESA-DRL: Memory-Enhanced Deep Reinforcement Learning, which incorporates an external memory module that allows an agent to efficiently explore and reason about its environment by accessing relevant stored information.
Overall, the key contribution of this work is demonstrating how retrieval-based reasoning can be integrated with deep learning models to create more capable embodied agents that can better perceive, understand, and interact with physical environments.
Critical Analysis
The paper presents several compelling approaches for enhancing embodied agents through the use of retrieval-augmented reasoning. However, the authors acknowledge some limitations and areas for further research.
One key challenge is how to effectively integrate the retrieval component with the deep learning models to achieve optimal performance. The authors note that careful design of the retrieval interface and training procedures is required to fully unlock the potential of this hybrid approach.
Additionally, the current implementations primarily focus on structured knowledge bases and retrieval of textual and visual information. Expanding the capabilities to handle more open-ended, unstructured knowledge sources could further broaden the agents' understanding and reasoning abilities.
The paper also discusses the potential for these retrieval-augmented agents to exhibit undesirable behaviors, such as over-reliance on retrieved information or the introduction of biases from the knowledge base. Robust mechanisms for evaluating and mitigating such issues will be an important area of future research.
Overall, this work represents an important step towards developing more capable and versatile embodied AI systems. By seamlessly integrating deep learning and information retrieval, the researchers have demonstrated promising avenues for enhancing agents' perception, reasoning, and interaction capabilities in the physical world.
Conclusion
This paper presents the concept of "retrieval-augmented embodied agents", which combine deep learning models with information retrieval to create AI systems that can better understand and interact with physical environments.
The key idea is to enable agents to efficiently explore their surroundings, describe scenes in detail, and reason about their actions by leveraging relevant information from a knowledge base. The paper showcases several novel approaches that integrate retrieval-based reasoning into embodied agents, demonstrating improved performance on tasks like navigation, scene understanding, and captioning.
The work represents an important step towards developing more capable and versatile embodied AI systems. By seamlessly integrating deep learning and information retrieval, the researchers have opened up promising avenues for enhancing agents' perception, reasoning, and interaction capabilities in the real world. As the field continues to evolve, further research on effectively managing the integration of retrieval and deep learning, as well as expanding the knowledge sources used, will be key to unlocking the full potential of retrieval-augmented embodied agents.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Retrieval-Augmented Embodied Agents
Yichen Zhu, Zhicai Ou, Xiaofeng Mou, Jian Tang
Embodied agents operating in complex and uncertain environments face considerable challenges. While some advanced agents handle complex manipulation tasks with proficiency, their success often hinges on extensive training data to develop their capabilities. In contrast, humans typically rely on recalling past experiences and analogous situations to solve new problems. Aiming to emulate this human approach in robotics, we introduce the Retrieval-Augmented Embodied Agent (RAEA). This innovative system equips robots with a form of shared memory, significantly enhancing their performance. Our approach integrates a policy retriever, allowing robots to access relevant strategies from an external policy memory bank based on multi-modal inputs. Additionally, a policy generator is employed to assimilate these strategies into the learning process, enabling robots to formulate effective responses to tasks. Extensive testing of RAEA in both simulated and real-world scenarios demonstrates its superior performance over traditional methods, representing a major leap forward in robotic technology.
Read more4/19/2024

0
ERAGent: Enhancing Retrieval-Augmented Language Models with Improved Accuracy, Efficiency, and Personalization
Yunxiao Shi, Xing Zi, Zijing Shi, Haimin Zhang, Qiang Wu, Min Xu
Retrieval-augmented generation (RAG) for language models significantly improves language understanding systems. The basic retrieval-then-read pipeline of response generation has evolved into a more extended process due to the integration of various components, sometimes even forming loop structures. Despite its advancements in improving response accuracy, challenges like poor retrieval quality for complex questions that require the search of multifaceted semantic information, inefficiencies in knowledge re-retrieval during long-term serving, and lack of personalized responses persist. Motivated by transcending these limitations, we introduce ERAGent, a cutting-edge framework that embodies an advancement in the RAG area. Our contribution is the introduction of the synergistically operated module: Enhanced Question Rewriter and Knowledge Filter, for better retrieval quality. Retrieval Trigger is incorporated to curtail extraneous external knowledge retrieval without sacrificing response quality. ERAGent also personalizes responses by incorporating a learned user profile. The efficiency and personalization characteristics of ERAGent are supported by the Experiential Learner module which makes the AI assistant being capable of expanding its knowledge and modeling user profile incrementally. Rigorous evaluations across six datasets and three question-answering tasks prove ERAGent's superior accuracy, efficiency, and personalization, emphasizing its potential to advance the RAG field and its applicability in practical systems.
Read more5/14/2024
0
MEIA: Towards Realistic Multimodal Interaction and Manipulation for Embodied Robots
Yang Liu, Xinshuai Song, Kaixuan Jiang, Weixing Chen, Jingzhou Luo, Guanbin Li, Liang Lin
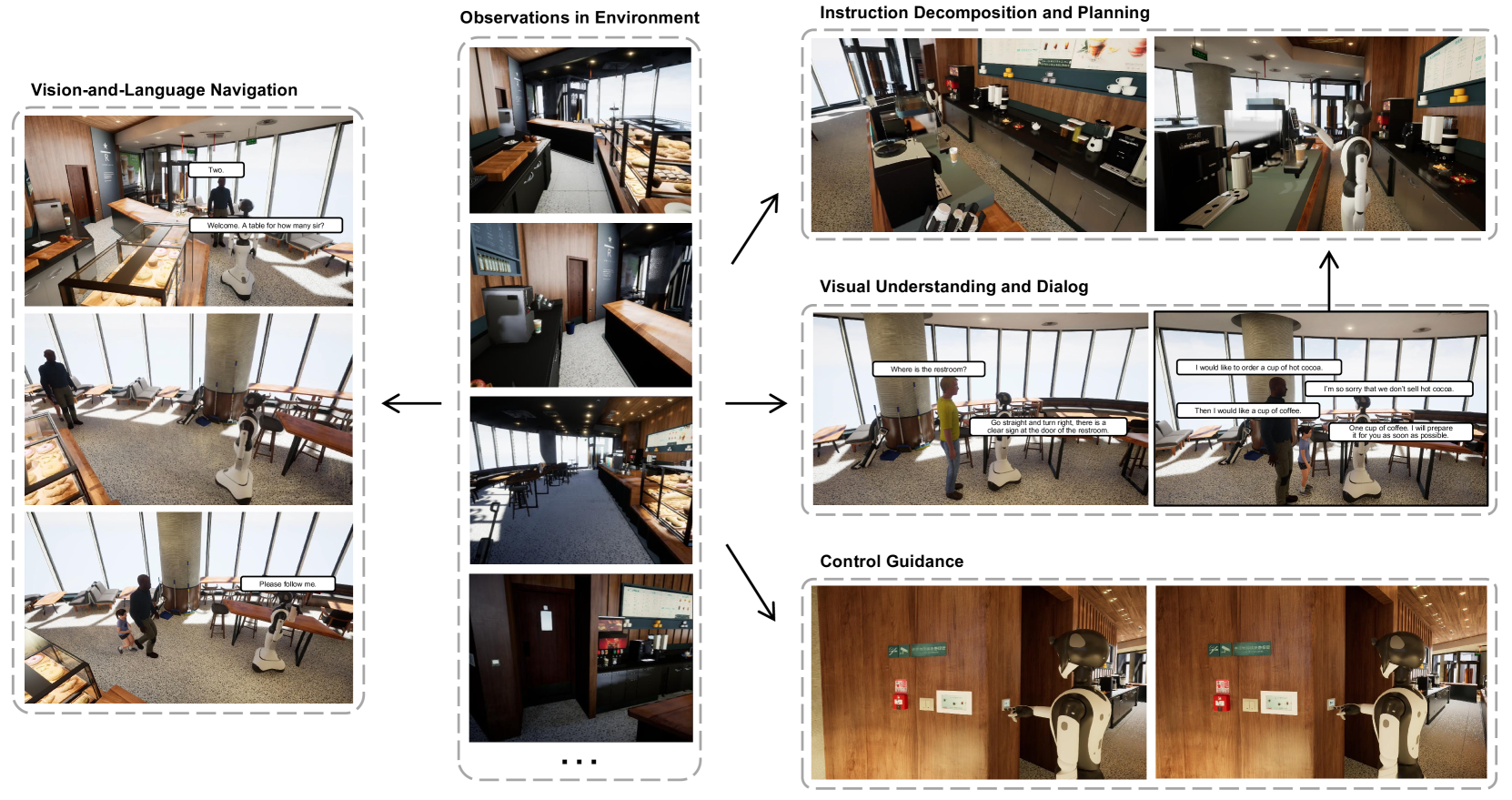
With the surge in the development of large language models, embodied intelligence has attracted increasing attention. Nevertheless, prior works on embodied intelligence typically encode scene or historical memory in an unimodal manner, either visual or linguistic, which complicates the alignment of the model's action planning with embodied control. To overcome this limitation, we introduce the Multimodal Embodied Interactive Agent (MEIA), capable of translating high-level tasks expressed in natural language into a sequence of executable actions. Specifically, we propose a novel Multimodal Environment Memory (MEM) module, facilitating the integration of embodied control with large models through the visual-language memory of scenes. This capability enables MEIA to generate executable action plans based on diverse requirements and the robot's capabilities. Furthermore, we construct an embodied question answering dataset based on a dynamic virtual cafe environment with the help of the large language model. In this virtual environment, we conduct several experiments, utilizing multiple large models through zero-shot learning, and carefully design scenarios for various situations. The experimental results showcase the promising performance of our MEIA in various embodied interactive tasks.
Read more7/30/2024
🛸
0
PersonaRAG: Enhancing Retrieval-Augmented Generation Systems with User-Centric Agents
Saber Zerhoudi, Michael Granitzer
Large Language Models (LLMs) struggle with generating reliable outputs due to outdated knowledge and hallucinations. Retrieval-Augmented Generation (RAG) models address this by enhancing LLMs with external knowledge, but often fail to personalize the retrieval process. This paper introduces PersonaRAG, a novel framework incorporating user-centric agents to adapt retrieval and generation based on real-time user data and interactions. Evaluated across various question answering datasets, PersonaRAG demonstrates superiority over baseline models, providing tailored answers to user needs. The results suggest promising directions for user-adapted information retrieval systems.
Read more7/15/2024